Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
Workshop Fuzzy Aplikasi Logika Fuzzy Untuk Pendukung Keputusan

2
Fuzzy DSS Fuzzy Database (Fuzzy Model Tahani,Fuzzy Model Umano)
Fuzzy Clustering(FCM,FPCM,FuzzySubtractive) Fuzzy Linear Programming(FLP) Fuzzy Integer Trasportasi Problem Fuzzy Multy-Attribut Decision Making Fuzzy Multy-Expert Multy-Attribut Decision Making dll.
 Fuzzy Linear Programming(FLP) Fuzzy Integer Trasportasi Problem. Fuzzy Multy-Attribut Decision Making. Fuzzy Multy-Expert Multy-Attribut Decision Making dll.")
3
Oleh: Identifikasi Isyarat Tangan Sebagai Pengendali Telerobotik
Secara Real-Time Oleh: Edi Satriyanto

4
Latar Belakang Computer Vision Robot Vision Humanoid Robot
Human Robot Interface Isyarat Tangan sebagai bahasa komunikasi [24] “Real-Time Hand Gesture Telerobotic System Using the Fuzzy C-Means Clustering Algorithm” [2004] : tangan statik [2].”Simultaneous Localization and Recognition of Dynamic Hand Gesture” [2005]: virtual hand writing

5
Rumusan Masalah Bagaimana metode mengidentifikasi gerakan obyek ( motion detection) untuk mengetahui ada obyek yang bergerak atau tidak. Bagaimana metode mengidentifikasi warna kulit tangan (skin detection) menggunakan Fuzzy C-Mean Bagaimana ekstrasi ciri pola tangan menggunakan integral proyeksi. Bagaimana mendeteksi pola tangan (pattern detection) Bagaimana mengidentifikasi serangkaian pola isyarat tangan secara real-time yang berupa pola angka (virtual hand writing), menjadi satu perintah dalam mengendalikan robot secara jarak jauh.
 menggunakan Fuzzy C-Mean. Bagaimana ekstrasi ciri pola tangan menggunakan integral proyeksi. Bagaimana mendeteksi pola tangan (pattern detection) Bagaimana mengidentifikasi serangkaian pola isyarat tangan secara real-time yang berupa pola angka (virtual hand writing), menjadi satu perintah dalam mengendalikan robot secara jarak jauh.")
6
Batasan Masalah Pengangkapan obyek menggunakan web-cam.
Intensitas pencahayaan yang dibutuhkan harus baik Kemampuan robot hanya mampu mendeteksi enam macam gerakan. Latar belakang obyek dibatasi warna terang mendekati warna putih.

7
PERANCANGAN SYSTEM Konfigurasi Sistem User Gesture Caputre Kamera Pre-
Processing Moving Detection Skin Detection Fuzzy C-Mean (FCM) Konversi Gi ke perintah String Komunikasi TCP/IP Robot Kontroler Jalankan Perintah Gambar Image Dikirim dari remote site Classified Hand Gesture,Gi Feature String=[f1,…,fn] dari Gesture Gi Gambar Pola Gerakan Tangan (Virtual Hand writing) Identifikasi Gambar Angka (Neural Network)
 Konversi Gi. ke perintah String. Komunikasi. TCP/IP. Robot Kontroler. Jalankan. Perintah. Gambar Image. Dikirim dari. remote site. Classified Hand Gesture,Gi. Feature String=[f1,…,fn] dari Gesture Gi. Gambar Pola Gerakan Tangan. (Virtual Hand writing) Identifikasi Gambar Angka. (Neural Network)")
8
Tujuan dan Manfaat Tujuan dari Tesis yang diusulkan ini adalah mengidentifikasi isyarat tangan secara real-time, yang berhubungan dengan teknik pengolahan citra yang bergerak, tergantung dari waktu, tidak hanya identifikasi satu pola tapi serangkaian pola yang menjadi satu bahasa isyarat yang saling berhubungan. Untuk lebih jelas, maka diaplikasi pada suatu robot yang dikendalikan jarak jauh, sehingga robot akan mampu berinteraksi dengan manusia, dengan memahami isyarat tangan yang dipelajari oleh robot.

9
1. Hubungan penelitian sebelumnya
TINJAUAN PUSTAKA 1. Hubungan penelitian sebelumnya 1.1. Penelitian Sekitar Identifikasi isyarat tangan: [2004] “Real-Time Hand Gesture Telerobotic System Using the Fuzzy C-Means Clustering Algorithm” [24] [2005] “Simultaneous Localization and Recognition of Dynamic Hand Gestures” [2].

10
“Real-Time Hand Gesture Telerobotic System Using the Fuzzy C-Means Clustering Algorithm” [24]
![Real-Time Hand Gesture Telerobotic System Using the Fuzzy C-Means Clustering Algorithm [24]](http://slideplayer.info/slide/2897546/10/images/10/Real-Time+Hand+Gesture+Telerobotic+System+Using+the+Fuzzy+C-Means+Clustering+Algorithm+%5B24%5D.jpg "Real-Time Hand Gesture Telerobotic System Using the Fuzzy C-Means Clustering Algorithm [24]")
11
Simultaneous Localization and Recognition of Dynamic Hand Gestures” [2].
![Simultaneous Localization and Recognition of Dynamic Hand Gestures [2].](http://slideplayer.info/slide/2897546/10/images/11/Simultaneous+Localization+and+Recognition+of+Dynamic+Hand+Gestures+%5B2%5D..jpg "Simultaneous Localization and Recognition of Dynamic Hand Gestures [2].")
12
1.2. Penelitian Sekitar deteksi warna kulit pada penelitian Mihaela Gordan [8]
Mihaela Gordan, Costin Miron, dan Apostolos Georgakis dalam papernya “An Optimal Feature Selection Strategy For Fuzzy C-Means, Application to Lip-To-Skin Discrimination”, menjelaskan untuk membedakan bibir dan kulit dengan menggunakan Fuzzy C-Means (FCM) [8]. Strategy yang dilakukan adalah untuk melakukan segmentasi antara bibir dan kulit berdasarkan gradiasi warnanya, menggunakan 2 klasifikasi untuk membedakan warna bibir dan kulit. Gambar Hasil FCM dengan versi nilai bobot yang berbeda (a).Gambar Asli;(b).Optimal set((w1,w2)=(0.6;0.4)) pada baris pertama, dan ((w1,w2)=(1;0.4)) untuk baris kedua ; (c).(w1,w2)=(1;0.2) telah ditentukan;(d). w1=w2=1 pada penelitian [8]
![1.2. Penelitian Sekitar deteksi warna kulit pada penelitian Mihaela Gordan [8]](http://slideplayer.info/slide/2897546/10/images/12/1.2.+Penelitian+Sekitar+deteksi+warna+kulit+pada+penelitian+Mihaela+Gordan+%5B8%5D.jpg "Mihaela Gordan, Costin Miron, dan Apostolos Georgakis dalam papernya An Optimal Feature Selection Strategy For Fuzzy C-Means, Application to Lip-To-Skin Discrimination , menjelaskan untuk membedakan bibir dan kulit dengan menggunakan Fuzzy C-Means (FCM) [8]. Strategy yang dilakukan adalah untuk melakukan segmentasi antara bibir dan kulit berdasarkan gradiasi warnanya, menggunakan 2 klasifikasi untuk membedakan warna bibir dan kulit. Gambar Hasil FCM dengan versi nilai bobot yang berbeda. (a).Gambar Asli;(b).Optimal set((w1,w2)=(0.6;0.4)) pada baris pertama, dan ((w1,w2)=(1;0.4)) untuk baris kedua ; (c).(w1,w2)=(1;0.2) telah ditentukan;(d). w1=w2=1. pada penelitian [8]")
13
4.Fuzzy Clustering Untuk mengelompokan para pengambil keputusan menjadi kelompok-kelompok kecil, berdasarkan persamaan karakteristik, dibutuhkan suatu mekanisme tertentu.Pada proses pengclusteran (clustering) secara klasik, pembentukan partisi dilakukan sedemikian rupa sehingga setiap obyek berada tepat pada satu partisi. Namun adakalanya tidak dapat menempatkan suatu obyek tepat pada suatu partisi, karena sebenarnya obyek tersebut terletak diantara atau lebih partisi yang lain. Pada logika fuzzy, ada beberapa metode yang dapat digunakan untuk mengelompokan sejumlah data yang sering dikenal dengan nama fuzzy clustering. Dikatakan sebagai algoritma fuzzy clustering jika dan hanya jika algoritma tersebut menggunakan parameter strategi adaptasi secara soft competitive (non-crips). Sebagian besar algoritma fuzzy clustering didasarkan atas optimasi fungsi obyektif atau modifikasi dari fungsi obyektif tersebut.
 secara klasik, pembentukan partisi dilakukan sedemikian rupa sehingga setiap obyek berada tepat pada satu partisi. Namun adakalanya tidak dapat menempatkan suatu obyek tepat pada suatu partisi, karena sebenarnya obyek tersebut terletak diantara atau lebih partisi yang lain. Pada logika fuzzy, ada beberapa metode yang dapat digunakan untuk mengelompokan sejumlah data yang sering dikenal dengan nama fuzzy clustering. Dikatakan sebagai algoritma fuzzy clustering jika dan hanya jika algoritma tersebut menggunakan parameter strategi adaptasi secara soft competitive (non-crips). Sebagian besar algoritma fuzzy clustering didasarkan atas optimasi fungsi obyektif atau modifikasi dari fungsi obyektif tersebut.")
14
Secara umum, algoritma pengclusteran dicirikan berdasarkan ukuran kedekatan dan kriteria penclusteran. Ukuran kedekatanan menunjukan seberapa dekat kedekatan fitur antara 2 data, sedangkan kriteria penclusteran biasanya diekspresikan dengan menggunakan fungsi biaya atau tipe aturan yang lainnya.

15
Indeks Kekaburan Indek kekaburan adalah jarak antara suatu himpunan fuzzy A dengan himpunan crisp C yang terdekat.Himpunan crisp C terdekatdari himpunan fuzzy A dinotasikan sebagai adalah fungsi jarak yang dapat digunakan dalam mencari indeks kekaburan ,yaitu :

16
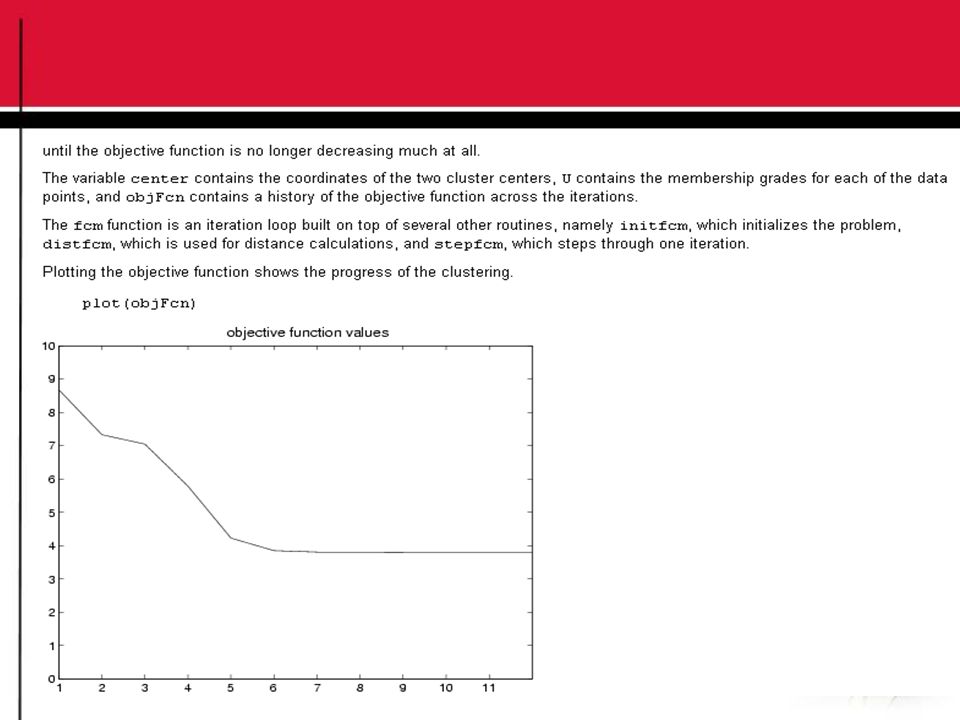
Fuzzy C-Means(FCM) Fuzzy C-Mean (FCM) adalah suatu teknik pengklusteran data yang mana keberadaan tiap-tiap titik data dalam suatu cluster ditentukan oleh derajat keanggotaan. Konsep dasar FCM pertama kali adalah menentukan pusat cluster .pada kondisi awal pusat cluter ini masih belum akurat .tiap data memiliki derajat keanggotaan untuk tiap tiap cluster.dengan cara memperbaiki pusat cluster dan nilai keanggotaan tiap data secara berulang,maka akan dapat dilihat bahwa pusat cluster akan bergerak menuju lokasi yang tepat.Perulangan ini didasarkan pada minimisasi fungsi obyektif.
 adalah suatu teknik pengklusteran data yang mana keberadaan tiap-tiap titik data dalam suatu cluster ditentukan oleh derajat keanggotaan. Konsep dasar FCM pertama kali adalah menentukan pusat cluster .pada kondisi awal pusat cluter ini masih belum akurat .tiap data memiliki derajat keanggotaan untuk tiap tiap cluster.dengan cara memperbaiki pusat cluster dan nilai keanggotaan tiap data secara berulang,maka akan dapat dilihat bahwa pusat cluster akan bergerak menuju lokasi yang tepat.Perulangan ini didasarkan pada minimisasi fungsi obyektif.")
17
Fungsi obyek Fungsi obyek yang di gunakan pada FCM adalah:
Jw (U,V;X)= (2.26) dik =d(xk-vi) = …..(2.27) J x adalah data yang akan di cluster Dan V adalah matriks pusat cluster X= …(2.28) V= …(2.29) Nilai Jw terkecil adalah yang terbaik, sehingga : J(U*,V*;X)= minMfc J(U,V;X) Dimana Vij=
= ....(2.26) dik =d(xk-vi) = …..(2.27) J. x adalah data yang akan di cluster. Dan V adalah matriks pusat cluster. X= …(2.28) V= …(2.29) Nilai Jw terkecil adalah yang terbaik, sehingga : J(U*,V*;X)= minMfc J(U,V;X) Dimana Vij=")
18
Algoritma FCM Input data yang akan di cluster X, berupa matriks berukuran n x m (n=jumlah sam[pel data, m=attribute setiap data). 2. Tentukan : Jumlah cluster = c; Pangkat = w; Maksimum iterasi = MaxIter; Error terkecil yang diharapkan = ξ; Fungsi obyektif awal = P0 = 0; Iterasi awal = t =1; 3. Bangkitkan bilangan random μik , dimana i=1,2,3,…,n; k=1,2,….,c; sebagai elemen-elemen matriks partisi awal U. Ui k = (2.3.1)
")
19
- Jika : ( | Pt-Pt-1 | < ξ ) atau ( t > maxIter)
4. Hitung pusat cluster ke-k: Vkj, dengan k=1,2,….,c; dan j=1,2,…,m. (2.32) 5. Hitung fungsi obyektif pada iterasi ke –t, Pt : …...(2.33) 6. Hitung perubahan matriks partisi : 7. Cek kondisi berhenti : - Jika : ( | Pt-Pt-1 | < ξ ) atau ( t > maxIter) maka berhenti; - Jika tidak : t=t+1, ulangi langkah ke -4. .…(2.34) Dengan : i=1,2,…..,n; dan k=1,2,…c.
 5. Hitung fungsi obyektif pada iterasi ke –t, Pt : …...(2.33) 6. Hitung perubahan matriks partisi : 7. Cek kondisi berhenti : - Jika : ( | Pt-Pt-1 | < ξ ) atau ( t > maxIter) maka berhenti; - Jika tidak : t=t+1, ulangi langkah ke -4. .…(2.34) Dengan : i=1,2,…..,n; dan k=1,2,…c.")
20
Ekstrasi warna kulit tangan
Sample Warna Kulit FCM

21
Identifkasi Obyek Dibagi menjadi tiga tahap
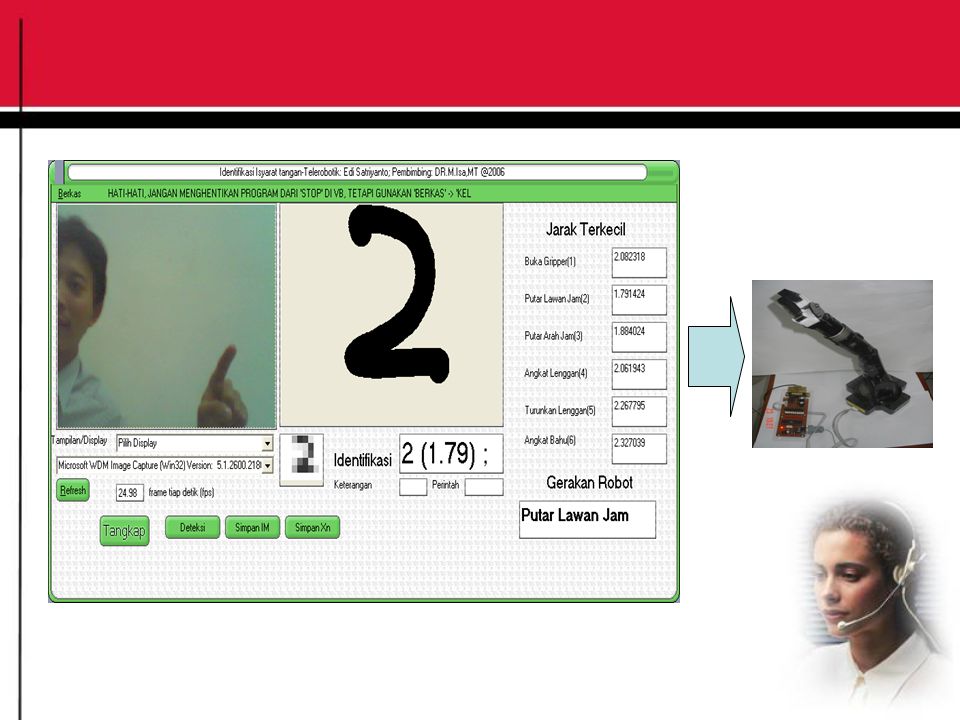
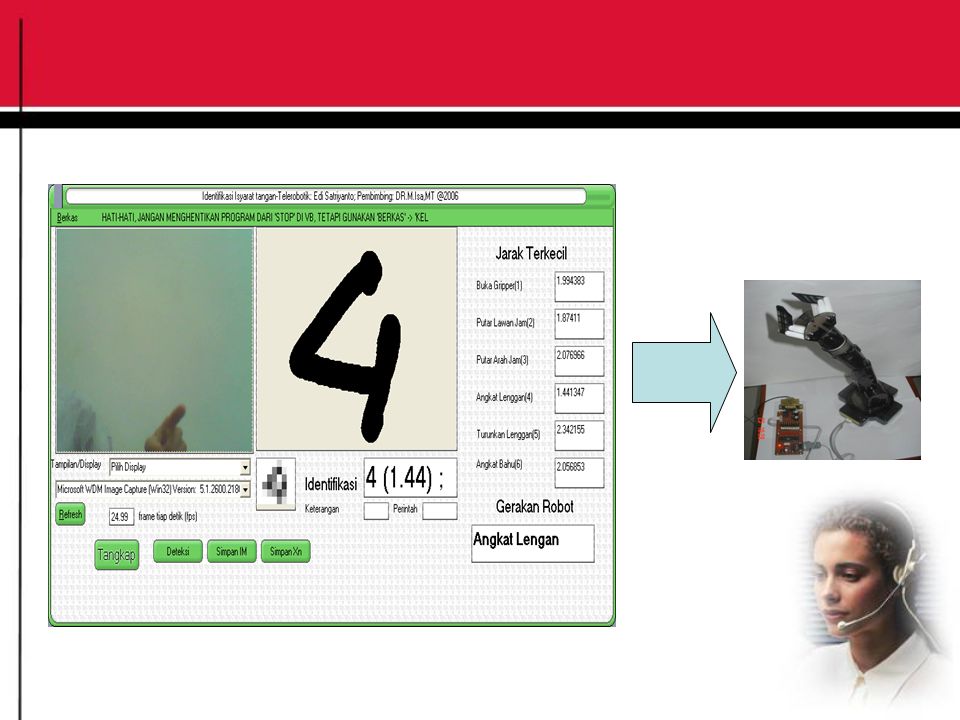
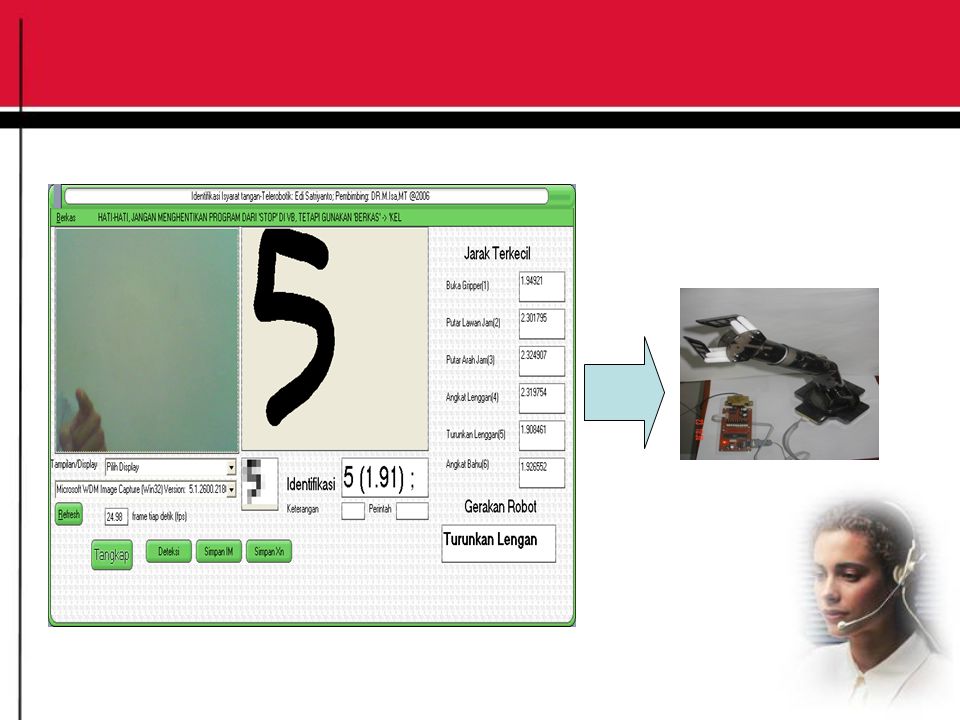
Tahap deteksi warna Kulit tangan ecluidean dari pusat cluster yang diperoleh dari FCM Tahap deteksi pola tangan dengan menetukan rule yang sesuai dengan ekstrasi ciri dari bentuk tangan menunjuk(nilai minimum dan maksimum) Tahap identifikasi pola angka 1-6.(Virtual hand writing) dengan JST metode LVQ. Pola angka 1 : Membuka Pola angka 2 : Memutar pergelangan tangan berlawan jarum jam Pola angka 3 : Memutar pergelangan tangan searah jarum jam Pola angka 4 : Mengangkat lengan Pola angka 5 : Menurunkan lengan Pola angka 6 : Mengangkat bahu Matrik 340x240 Scaling
 Tahap identifikasi pola angka 1-6.(Virtual hand writing) dengan JST metode LVQ. Pola angka 1 : Membuka. Pola angka 2 : Memutar pergelangan tangan berlawan jarum jam. Pola angka 3 : Memutar pergelangan tangan searah jarum jam. Pola angka 4 : Mengangkat lengan. Pola angka 5 : Menurunkan lengan. Pola angka 6 : Mengangkat bahu. Matrik 340x240. Scaling.")
22
Analisis Hasil Implementasi
1.Deteksi pergerakan(moving detection)
")
23
2. Deteksi warna kulit Jumlah Cluster n=2
Centroid Cluster untuk komposisi nilai RGB adalah sebagai berikut : Variabel R G B Cluster 1 : Cluster 2: Uji Bukan Kulit: Kebenaran rata-rata % termasuk cluster bukan kulit dan % salah masuk ke cluster kulit. Hasil pengujian obyek kulit: 92.976% masuk cluster kulit dan 7.024% salah cluster.

24
Jumlah Cluster n=3 Centroid Cluster untuk komposisi nilai RGB adalah sebagai berikut : Variabel R G B Cluster 1 : Cluster 2: Cluster 3: Uji Kulit: Masuk pada cluster kulit % dan % salah cluster. Uji Bukan Kulit: 99.866% termasuk cluster bukan kulit dan 0.134% salah masuk ke cluster kulit

25
Jumlah Cluster n=4 Centroid Cluster untuk komposisi nilai RGB adalah sebagai berikut : Variabel R G B Cluster 1 : Cluster 2: Cluster 3: Cluster 4: Pengujian Kulit: Masuk pada cluster kulit % dan % salah cluster. Pengujian Bukan Kulit: % termasuk cluster bukan kulit dan % salah masuk ke cluster kulit.

26
Jumlah Cluster n=5 Centroid Cluster untuk komposisi nilai RGB adalah sebagai berikut : Variabel R G B Cluster 1 : Cluster 2: Cluster 3: Cluster 4: Cluster 5: Uji Kulit: Masuk pada cluster kulit % dan % salah cluster. Uji Bukan Kulit: 100% termasuk cluster bukan kulit dan 0% salah masuk ke cluster kulit.

27
Jumlah Cluster n=6 Centroid Cluster untuk komposisi nilai RGB adalah sebagai berikut : Variabel R G B Cluster 1 : Cluster 2: Cluster 3: Cluster 4: Cluster 5: Cluster 6: Uji Kulit: rata-rata kebenaran masuk pada cluster kulit % dan % salah cluster. Uji Bukan Kulit: % termasuk cluster bukan kulit dan 1.3032% salah masuk ke cluster kulit.

28
Uji segmentasi kulit tangan pada 5 Cluster

29
Deteksi pola bentuk tangan

30
Deteksi pola gambar pergerakan tangan sebagai pengendali robot
Virtual Hand Writing

36
Hasil Pengujian LVQ Maka ada 79.2% pola angka dapat dikenali
sesuai dengan target yang dimaksud.

37
Kesimpulan Hasil deteksi pergerakan (moving detection) kecepatan obyek mampu di tangkap kamera dengan baik dalam 1 detik sebesar %, sedangkan pergerakan obyek dengan kecepatan 0.5 detik dapat ditangkap dengan kamera sebesar %. Hal ini berarti makin cepat pergerakan obyek akan mengurangi kemampuan deteksi obyek bergerak. Hasil deteksi warna kulit menggunakan Fuzzy C-Mean(FCM) pada jumlah cluster 5, mampu melakukan identifikasi warna kulit sebesar kulit % sedangkan dalam membedakan latar obyek dapat melakukan identifikasi 100% dengan latar obyek yang mendekati warna putih, makin sedikit jumlah cluster maka latar belakang obyek makin sedikit variasi yang mampu diidentifikasi, sebaliknya makin banyak jumlah cluster maka makin banyak obyek masuk ke cluster latar obyek. Hasil identifikasi pola tangan, dimana ekstrasi cirinya digunakan integral proyeksi, dengan metode rule base dapat diidentifikasi 86.67%. Hasil gerakan tangan yang telah diidentifikasi menghasilkan virtual hand writing, berupa pola gambar angka 1 sampai 6. Dengan LVQ, setelah dilakukan pengujian 79.2% pola angka dapat dikenali sesuai dengan target Robot dapat dikendalikan secara jarak jauh, sesuai dengan pola pergerakan isyarat tangan yang berupa virtual hand writing sebagai perintah yang telah ditentukan.
 kecepatan obyek mampu di tangkap kamera dengan baik dalam 1 detik sebesar %, sedangkan pergerakan obyek dengan kecepatan 0.5 detik dapat ditangkap dengan kamera sebesar %. Hal ini berarti makin cepat pergerakan obyek akan mengurangi kemampuan deteksi obyek bergerak. Hasil deteksi warna kulit menggunakan Fuzzy C-Mean(FCM) pada jumlah cluster 5, mampu melakukan identifikasi warna kulit sebesar kulit % sedangkan dalam membedakan latar obyek dapat melakukan identifikasi 100% dengan latar obyek yang mendekati warna putih, makin sedikit jumlah cluster maka latar belakang obyek makin sedikit variasi yang mampu diidentifikasi, sebaliknya makin banyak jumlah cluster maka makin banyak obyek masuk ke cluster latar obyek. Hasil identifikasi pola tangan, dimana ekstrasi cirinya digunakan integral proyeksi, dengan metode rule base dapat diidentifikasi 86.67%. Hasil gerakan tangan yang telah diidentifikasi menghasilkan virtual hand writing, berupa pola gambar angka 1 sampai 6. Dengan LVQ, setelah dilakukan pengujian 79.2% pola angka dapat dikenali sesuai dengan target. Robot dapat dikendalikan secara jarak jauh, sesuai dengan pola pergerakan isyarat tangan yang berupa virtual hand writing sebagai perintah yang telah ditentukan.")
38
Workshop FCM

41
Latihan : Load data tsb. Lakukan Cluster untuk C=3
Cari Pusat Clusternya Hitung jarak terdekat Bila diketahui data : [ ]

42
Hitung Jarak center = uji=[ ]; d(1)=0; d(2)=0; d(3)=0; n=3; m=3; lokasi=1; for k=1:n for l=1:m d(k)=d(k)+(uji(l)-center(k,l))^2; end; jrk(k)=sqrt(d(k)) min=jrk(1); for h=2:n if min>jrk(h) min=jrk(h); lokasi=h; hasil=lokasi jrk = hasil =2
=0; d(2)=0; d(3)=0; n=3; m=3; lokasi=1; for k=1:n. for l=1:m. d(k)=d(k)+(uji(l)-center(k,l))^2; end; jrk(k)=sqrt(d(k)) min=jrk(1); for h=2:n. if min>jrk(h) min=jrk(h); lokasi=h; hasil=lokasi. jrk = hasil =2.")
43
Session 2 Fuzzy Database
Sistem basis data berupakan suatu sistem informasi yang menitegrasikan kumpulan data saling berhubungan satu dengan yang lainnya dan membuatnya tersedia untuk beberapa aplikasi dalam suatu organisasi

44
Basis Data Fuzzy Model Tahani
Konsep Dasar Misal kita memiliki data mentah karyawan sebagai berikut :

45
Bila diolah sebagai berikut :
Biasanya Query : SELECT NAMA FROM PKARYAWAN WHERE UMUR<35 SELECT NAMA FROM PKARYAWAN WHERE GAJI> SELECT NAMA FROM PKARYAWAN WHERE Masa_Kerja<=5 and Gaji>

46
Biasanya….. Pada dasarnya, sesorang kadang membutuhkan informasi dari data-ata yang bersifat ambiguous. Apabila hal ini terjadui maka kita menggunakan basis data fuzzy. Ada beberapa penelitian tentang basis data fuzzy salah satunya model tahani.

47
Tetapi…..kalo dicari ???/ Siapa saja karyawan yang masih muda tapi memilki gaji tinggi? Siapa Sajakah karyawan yang masih mudah atau karyawan yang memiliki gaji tinggi Siapa saja-kah karyawan yang masih muda tapi masa kerjanya sudah lama? Siapa sajakah karyawan yang parobaya dan gajinya sedang, atau karyawan yang parobaya tapi masa kerjanya sudah lama?

48
Basis data model Tahani
Tetap menggunakan relasi standart, hanya saja model ini menggunakan teori himpunan fuzzy untuk mendapatkan querynya. Misalkan: 1. Kita menkatagorikan usia karyawan diatas ke dalam himpunan: MUDA, PAROBAYA, DAN TUA Muda Parobaya Tua 1 Umur Gambar: Fungsi keanggotaan untuk variabel Usia

49
Fungsi Keanggotaan Muda Parobaya Tua 1 Umur

50
Shg Tabel karyawan berdasarkan umur gn derajat keanggotaan pada setiap himpunan:

51
2. Variabel Masa Kerja Dikategorikan dalam himpunan: BARU dan LAMA
Baru Lama 1 Fungsi Keanggotaan :

52
Hasil tabel karyawan berdasarkan umur derajat keanggotaan pada setiap himpunan

53
Jawaban Soal Siapa sajakan karyawan yang masiH muda tapi masa kerjanya sudah lama? Query: SELECT NAMA FROM KARYWAN WHERE (UMUR=“Muda”) and (Masa_Kerja=“LAMA”)
 and (Masa_Kerja= LAMA )")
54
2. Variabel Gaji Rendah Sedang Tinggi

Presentasi serupa




>")

>")





>")





>")


