Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
Tranduser dan sensor “Sensor Mekanik”
Kurniawan teguh martono Sistem Komputer Undip

2
Tujuan Perkuliahan Setelah mengikuti perkuliahan ini mahasiswa diharapkan mampu : Menjelaskan cara kerja sensor mekanik Menjelaskan Karakteristik masing-masing sensor mekanik Merancangan sistem dengan sensor mekanik

3
Pendahuluan Pergerakkan mekanis adalah tindakan yang paling banyak dijumpai dalam kehidupan sehari-hari, seperti perpindahan suatu benda dari suatu posisi ke posisi lain, kecepatan mobil di jalan raya, dongrak mobil yang dapat mengangkat mobil seberat 10 ton, debit air didalam pipa pesat, tinggi permukaan air dalam tanki.

4
Gerak Mekanis Gerak mekanis disebabkan oleh adanya gaya aksi yang dapat menimbulkan gaya reaksi. Banyak cara dilakukan untuk mengetahui atau mengukur gerak mekanis misalnya mengukur jarak atau posisi dengan meter, mengukur kecepatan dengan tachometer, mengukur debit air dengan rotameter

5
Jenis-jenis sensor mekanis
Sensor posisi Starin Gauge Sensor Induktif dan Elektromagnet Linier Variable Differential Transformer (LVDT) Transduser Kapasitif Transduser perpindahan digital optis Transduser Piezoelectric Potensiometer Sensor Kecepatan ( Motion Sensor ) Tacho Generator Sensor Tekanan ( Presure Sensor )
 Transduser Kapasitif. Transduser perpindahan digital optis. Transduser Piezoelectric. Potensiometer. Sensor Kecepatan ( Motion Sensor ) Tacho Generator. Sensor Tekanan ( Presure Sensor )")
6
Sensor Posisi Pengukuran posisi dapat dilakukan dengan cara analog dan digital. Untuk pergeseran yang tidak terlalu jauh pengukuran dapat dilakukan menggunakan cara-cara analog, sedangkan untuk jarak pergeseran yang lebih panjang lebih baik digunakan cara digital. Hasil sensor posisi atau perpindahan dapat digunakan untuk mengukur perpindahan linier atau angular. Teknis perlakuan sensor dapat dilakukan dengan cara terhubung langsung ( kontak ) dan tidak terhubung langsung ( tanpa kontak ).
 dan tidak terhubung langsung ( tanpa kontak ).")
7
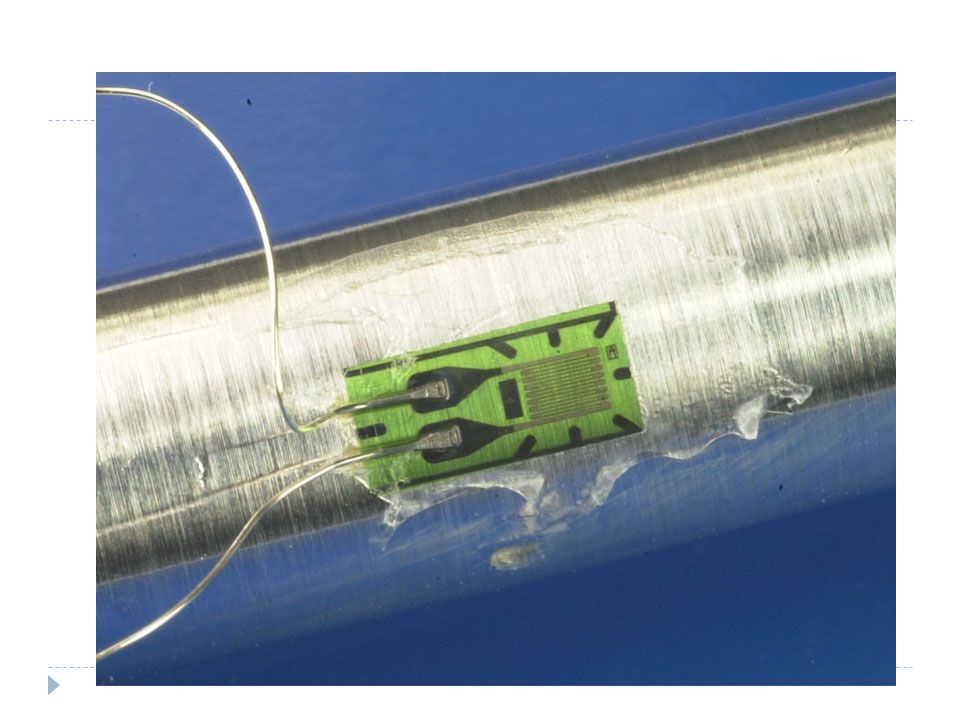
Strain gauge Strain gauge dalam operasinya memanfaatkan perubahan resistansi sehingganya dapat digunakan untuk mengukur perpindahan yang sangat kecil akibat pembengkokan (tensile stress) atau peregangan (tensile strain).
 atau peregangan (tensile strain).")
9
Elastisitas (ε) Elastisitas (ε) strain gauge adalah perbandingan perubahan panjang (ΔL) terhadap panjang semula (L) Dimana : perubahan panjang (ΔL) panjang semula (L)
 panjang semula (L)")
10
Persamaan yang lain Elastisitas merupakan perbandingan perubahan resistansi (ΔR) terhadap resistansi semula (R) sama dengan faktor gauge (Gf) dikali elastisitas starin gauge (ε) : Faktor gauge (Gf) merupakan tingkat elastisitas bahan metal dari Strain Gauge. metal incompressible Gf = 2 piezoresistif Gf =30 piezoresistif sensor digunakan pada IC sensor tekanan
 terhadap resistansi semula (R) sama dengan faktor gauge (Gf) dikali elastisitas starin gauge (ε) : Faktor gauge (Gf) merupakan tingkat elastisitas bahan metal dari Strain Gauge. metal incompressible Gf = 2. piezoresistif Gf =30. piezoresistif sensor digunakan pada IC sensor tekanan.")
11
Susunan Strain Gauge Secara konstruksi Strain Gauge terbuat dari bahan metal tipis (foil) yang diletakkan diatas kertas. Untuk proses pendeteksian Strain Gauge ditempelkan dengan benda uji dengan dua cara yaitu: Arah perapatan/peregangan dibuat sepanjang mungkin (axial) Arah tegak lurus perapatan/peregangan dibuat sependek mungkin (lateral)
 Arah tegak lurus perapatan/peregangan dibuat sependek mungkin (lateral)")
12
Uji maka rangkaian dan penempatan Strain Gauge
Disusun dalam rangkaian jembatan Dua strain gauge digunakan berdekatan, satu untuk peregangan/perapatan , satu untuk kompensasi temperatur pada posisi yang tidak terpengaruh peregangan/ perapatan Respons frekuensi ditentukan masa tempat strain gauge ditempatkan

13
Contoh rangkaiannya

14
Sensor Induktif dan Elektromagnet
Sensor induktif memanfaatkan perubahan induktansi Sebagai akibat pergerakan inti feromagnetik dalam koil Akibat bahan feromagnetik yang mendekat (a) Inti bergeser datar (b) Inti I bergser berputar, (c) Rangkaian variable induktansi
 Inti bergeser datar (b) Inti I bergser berputar, (c) Rangkaian variable induktansi.")
15
Induksi Elektromagnetik

16
Ilustrasi

17
Rangkaian pembaca perubahan induktansi
Dua induktor disusun dalam rangkaian jembatan, satu sebagai dummy Tegangan bias jembatan berupa sinyal ac Perubahan induktasi dikonversikan secara linier menjadi perubahan tegangan

18
Linier Variable Differential Transformer (LVDT)
Memanfaatkan perubahan induksi magnet dari kumparan primer ke dua kumparan sekunder Dalam keadaan seimbang, inti magnet terletak ditengah dan kedua kumparan sekunder menerima fluks yang sama Dalam keadaan tidak seimbang, fluks pada satu kumparan naik dan yang lainnya turun

19
Model LVDT

20
Susunan LVDT LVDT terdiri atas : Inti besi yang bergerak
Kumparan primer terhubung dengan tegangan AC sebagai tegangan acua Sepasang kumparan sekunder Berjumlah 2 buah, terletak di samping kiri dan kanan kumparan primer saling terhubung secara seri satu sama lain.

21
Contoh Penerapan Sensor
Sensor-sensor (perpindahan, jarak, dan sensor mekanik lainnya) Level fluida Automotive Suspension
 Level fluida. Automotive Suspension.")
22
Transduser Kapasitif memanfaatkan perubahan kapasitansi
akibat perubahan posisi bahan dielektrik diantara kedua keping akibat pergeseran posisi salah satu keping dan luas keping yang berhadapan langsung akibat penambahan jarak antara kedua keeping

23
Kapasitas (Kapasitansi) Kapasitor
Kapasitansi didefinisikan sebagai kemampuan dari suatu kapasitor untuk dapat menampung muatan elektron untuk level tegangan tertentu. Dengan rumus dapat ditulis : Q = CV Q = muatan elektron dalam C (coulombs) C = nilai kapasitansi dalam F (farads) V = besar tegangan dalam V (volt)
 C = nilai kapasitansi dalam F (farads) V = besar tegangan dalam V (volt)")
24
Sekian Terima Kasih Dilanjutkan Minggu depan

Presentasi serupa












 2. Beni Adi T (TK/30713) 2. Beni Adi T (TK/30713) 3. Rany P.D. (TK/30790) 4. Inne.>")

>")




