Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
Pengolahan Citra Digital
2010/2011 Kuliah 7 Analisis Citra 3 Segmentasi Citra: Metode Berbasis Histogram dan Metode Klustering Dr. Fitri Arnia, 2011

2
Outline Metode Berbasis Histogram Metode Klustering Histogram
Threshold pada histogram Metode Klustering K-means clustering

3
Metode Segmentasi Berbasis Histogram
Metode berbasis histogram adalah salah satu metode segmentasi paling sederhana. Histogram citra bisa digunakan sebagai dasar dari: Metode segmentasi menggunakan threshold Metode segmentasi menggunakan teknik klustering

4
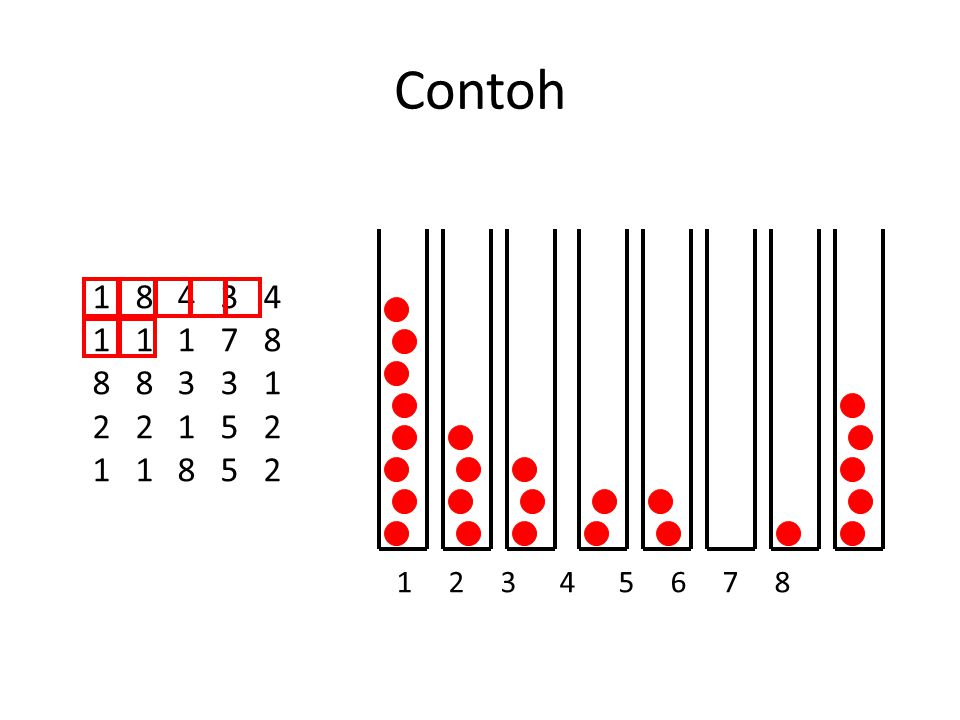
Histogram Fungsi histogram didefinisikan untuk semua tingkat intensitas yang ada. Untuk setiap nilai intensitas, nilainya sama dengan jumlah piksel dengan nilai intensitas tersebut.

5
Contoh Perhatikan citra 5x5 dengan intensitas bernilai bilangan bulat dalam range 1-8:
6
Contoh
7
Fungsi Histogram

8
Fungsi Histogram

9
Gambar dari fungsi histogram
Contoh Gambar dari fungsi histogram Citra asal

10
Gambar dari fungsi histogram
contoh Gambar dari fungsi histogram Citra asal

11
Gambar dari fungsi histogram
Contoh Gambar dari fungsi histogram Citra asal

12
Gambar dari fungsi histogram
Contoh Gambar dari fungsi histogram Citra asal

13
Segmentasi Berbasis histogram skala keabuan

14
Segmentasi Berbasis Histogram Skala Keabuan
Bebas Noise Kadar Noise rendah Kadar noise tinggi

15
Segmentasi Berbasis Histogram Skala Keabuan
Bagaimana karakteristik noise dengan kadar rendah dan tinggi pada histogram? Untuk citra di atas Jika citranya bebas noise, histogramnya adalah dua puncak pada i=100, i=150 Untuk citra dengan kadar noise rendah, ada dua puncak yang berpusat di i=100, i=150 Untuk citra dengan kadar noise tinggi , Cuma ada satu puncak – dua populasi skala keabuan yang masing-masing mewakili objek dan background, menjadi satu.

16
Segmentasi Berbasis Histogram Skala Keabuan

17
Segmentasi Berbasis Histogram Skala Keabuan
Kita dapat mendefinisikan signal-to-noise ratio dari citra masukan dalam besaran nilai rata-rata keabuan dari piksel objek dan piksel background dan standard deviasi dari noise additive sebagai berikut

18
Segmentasi Berbasis Histogram Skala Keabuan
Untuk citra uji kita di atas: S/N (bebas noise ) = S/N (kadar noise rendah) = 5 S/N (kadar noise tinggi) = 2
 = S/N (kadar noise rendah) = 5. S/N (kadar noise tinggi) = 2.")
19
Thresholding Skala Keabuan
Kita dapat dengan mudah mengerti proses segmentasi berbasis thresholding dengan melihat histogram dari citra dengan kadar noise rendah Ada ‘lembah’ yang jelas antara dua puncak.

20
Thresholding Skala Keabuan
Background Object T

21
Thresholding Skala Keabuan
Kita dapat mendefinisikan algoritma thresholding keabuan sebagai berikut: Jika tingkat keabuan dari piksel p <=T maka piksel p adalah piksel dari objek. else piksel p adalah piksel background

22
Thresholding Skala Keabuan
Cara penentuan threshold yang sederhana ini meninggalkan pertanyaan bersar, bagaimana menentukan titik threshold-nya ? Banyak cara yang mungkin dilakukan Threshold Interaktif Threshold Adaptif Metode Minimisasi

23
Thresholding Skala Keabuan
Kita akan membahas secara rinci metode minimisasi untuk menentukan threshold Minimisasi dalam varian group Robot Vision, Haralick & Shapiro, volume 1, page 20

24
Thresholding Skala Keabuan
Histogram citra ideal dari objek/background T

25
Thresholding Skala Keabuan
Semua threshold membagi histogram menjadi dua kelompok dengan setiap kelompok mempunyai statistiknya masing-masing (mean, variance) Kehomogenan dari setiap kelompok diukur dengan varian dalam kelompok Threshold optimum adalah threshold yang meminimumkan varian dalam kelompok itu, dan tentunya memaksimumkan kehomogenan dari kelompok tersebut.
 Kehomogenan dari setiap kelompok diukur dengan varian dalam kelompok. Threshold optimum adalah threshold yang meminimumkan varian dalam kelompok itu, dan tentunya memaksimumkan kehomogenan dari kelompok tersebut.")
26
Thresholding Skala Keabuan
Jika kelompok o (object) adalah piksel piksel dengan tingkat keabuan <=T Dan kelompok b (background) adalah piksel-piksel dengan tingkat keabuan >T Probabilitas prior dari kelompok o adalah po(T) Probabilitas prior dari kelompok b adalah pb(T)
 adalah piksel piksel dengan tingkat keabuan <=T. Dan kelompok b (background) adalah piksel-piksel dengan tingkat keabuan >T. Probabilitas prior dari kelompok o adalah po(T) Probabilitas prior dari kelompok b adalah pb(T)")
27
Thresholding Skala Keabuan
Persamaan berikut dapat dapat diturunkan untuk menghitung probabilitas prior dari objek dan background dengan h(i) adalah histogram dari citra dengan N pixel.
 adalah histogram dari citra dengan N pixel.")
28
Thresholding Skala Keabuan
Mean dan varian dari tiap kelompok adalah:

29
Thresholding Skala Keabuan
Varian dari setiap kelompok didefinisikan sebagai : Kita menentukan T yang optimum dengan meminimumkan persamaan ini terhadap T Hanya memerlukan 256 perbandingan untuk citra skala keabuan 8-bit.

30
Thresholding Skala Keabuan

31
Thresholding Skala Keabuan
Kita dapat menguji kinerja dari algoritma ini pada citra dengan kadar noise rendah dan tinggi Untuk citra dengan kadar noise rendah, threshold optimumnya adalah pada T=124 Hampir tepat pada pertengahan antara puncak objek dan background. Kita bisa juga menggunakan threshold optimum ini untuk citra dengan kadar noise rendah dan tinggi.

32
Thresholding Skala Keabuan
Citra dengan kadar noise rendah Di thresholdkan pada T=124

33
Thresholding Skala Keabuan
Citra dengan kadar noise tinggi Di-thresholdkan pada T=124

34
Thresholding Skala Keabuan
Banyak piksel salah dikelompokkan Ini adalah kinerja umum dari metode thresholding Kadar kesalahan pengelompokan ditentukan dari kadar tumpang tindih antara objek dan background pada histogram.

35
Thresholding Skala Keabuan
Background Object

36
Thresholding Skala Keabuan
Background Object

37
Thresholding Skala Keabuan
Sangat jelas terlihat, pada kedua kasus, untuk setiap nilai threshold, piksel-piksel objek dapat salah pengelompokkannya menjadi background dan sebaliknya. Funtuk kadar tumpang tindih yang besar, piksel yang salah pengelompokannya makin banyak. Kita bahkan dapat mengkuantisasi probabilitas kesalahannya dalam besaran mean dan deviasi standard dari histogram objek dan background

38
K-Means Clustering

39
K-Means Tentukan jumlah kluster yang tetap
Tentukan titik tengah kluster dan penempatan titik-titik kluster untuk meminimumkan kesalahan Hal ini tidak bisa dilakukan dengan pencarian (search), karena terlalu banyak tempat-tempat yang mungkin. Algoritma Tentukan pusat kluster; alokasikan titik-tiitk ke kluster terdekat Tetapkan alokasinya; hitung kembali pusat kluster terbaik x adalah himpunan fitur-fitur apa saja yang bisa dihitung jarak satu dengan yang lainnya (perhatikan masalah penyekalaan) * From Marc Pollefeys COMP
, karena terlalu banyak tempat-tempat yang mungkin. Algoritma. Tentukan pusat kluster; alokasikan titik-tiitk ke kluster terdekat. Tetapkan alokasinya; hitung kembali pusat kluster terbaik. x adalah himpunan fitur-fitur apa saja yang bisa dihitung jarak satu dengan yang lainnya (perhatikan masalah penyekalaan) * From Marc Pollefeys COMP")
40
K-Means * From Marc Pollefeys COMP

41
Segmentasi Citra Dengan K-Means
Pilih nilai K Pilih satu vektor fitur untuk setiap piksel (warna, tekstur, posisi, atau kombinasinya) Tentukan ukuran kemiripan yang akan digunakan untuk mengukur jarak antara vektor fitur (biasanya jarak Euclidean). Terapkan algoritma K-Means. Terapkan Algoritma Connected Components. Gabungkan semua komponen yang ukurannya kurang dari suatu nilai threshold ke komponen yang berdampingan yang paling mirip dengannya. * From Marc Pollefeys COMP
 Tentukan ukuran kemiripan yang akan digunakan untuk mengukur jarak antara vektor fitur (biasanya jarak Euclidean). Terapkan algoritma K-Means. Terapkan Algoritma Connected Components. Gabungkan semua komponen yang ukurannya kurang dari suatu nilai threshold ke komponen yang berdampingan yang paling mirip dengannya. * From Marc Pollefeys COMP")
42
Klustering K-means menggunakan intensitas atau warna saja
Hasil dari Klustering K-Means : I gave each pixel the mean intensity or mean color of its cluster --- this is basically just vector quantizing the image intensities/colors. Notice that there is no requirement that clusters be spatially localized and they’re not. Citra asal Kuster berbasis intensitas Kluster berbasis warna Klustering K-means menggunakan intensitas atau warna saja * From Marc Pollefeys COMP

43
Sources Slides of Dr. Dr. Ioannis Ivrissimtzis
Slides of Dr. Mike Spann, Birmingham University, UK Slides of Gary Bradski Sebastian Thrun At

Presentasi serupa

 Pengolahan Citra Digital>")







>")
 Yohanes Tanjung S.>")







>")
