Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
Oleh : Muhammad Ruswandi Djalal 2213201008
Optimization of PID Control for DC Motor Based On Artificial Bee Colony Algorithm Wudai Liao, Yingyue Hu, Haiquan Wang Zhongyuan University of Technology, China IEEE, Proceedings of the 2014 International Conference on Advanced Mechatronic Systems, Kumamoto, Japan, August 10-12, 2014 Oleh : Muhammad Ruswandi Djalal

2
Problems and Solutions...
Tuning parameter PID Tuning parameter PID using ABC

3
Coba dibandingkan Firefly Algorithm Cuckoo Search Algorithm
Bat Algorithm Flower Pollination Algorithm Differential Evolution Ant Colony Optimization Particle Swarm Optimization Imperialist Competitive Algorithm

4
I. INTRODUCTION PID : Simple structure, good Stability & strong Robustness PID Parameter Manual method, large overshoot and difficult to get ideal control effect. Artificial bee colony

5
II. ABC ALGORITHM

6
Artificial Bee Colony Select Best Food Foraging Sharing Information
Konsep : Lebah mencari sumber makanan (madu) yang terbaik
 yang terbaik.")
7
FORAGING Source A Source B Sampling

8
SHARING INFORMATION Hive A,B,C Sample
Source Hive A,B,C Sample waggle dance

9
Source A SELECT FOOD SOURCE

11
Compare current & new food
Inisialisasi Movement of scout bee Compare current & new food fi is the fitness value of solution Zi. If the nectar amount of the new solution is higher than of the previous one(the fitness of Zi is better than Yi), the bee memories the new position and forgets the old one.
, the bee memories the new position and forgets the old one.")
12
Artificial Bee Colony Inisialisasi Populasi lebah (Kp, Ki, Kd) Proses (Foraging) Select Best Food Kp “best” Ki “best” Kd “best” Konsep : Lebah mencari sumber makanan (madu) yang terbaik Objective Function
 yang terbaik. Objective Function.")
13
III. DESIGN OF PID CONTROLLER
DC Motor Modeling PID controller Designing

14
DC Motor Modeling DC permanent magnet motor rated speed is 1400rpm
speed measured 1250rpm In order to obtain the parameters of the first-order system, system identification theory[19] is adopted Mechanical gain Mechanical time constant.

15
PID controller Design how to configure the three parameters of PID (Kp, Ki, Kd) P element : to reduce the deviation I element : to eliminate static error and improve the stability of system D element : to reduce the setting time

16
Objective Function Objective Function

17
IV. Simulation & Analysis
sampling time, T = 10 ms Kp [0,40] Ki [0,10] Kd [0,1] Maxcycle 100

21
V. Conclusions Optimization problem of PID parameters for DC motor can be effectively solved by ABC algorithm the validity of ABC algorithm which can be effectively applied to optimize the parameters of PID controller in DC motor system is proved.

22
Coba dibandingkan Firefly Algorithm Cuckoo Search Algorithm
Bat Algorithm Flower Pollination Algorithm Differential Evolution Ant Colony Optimization Particle Swarm Optimization Imperialist Competitive Algorithm

23
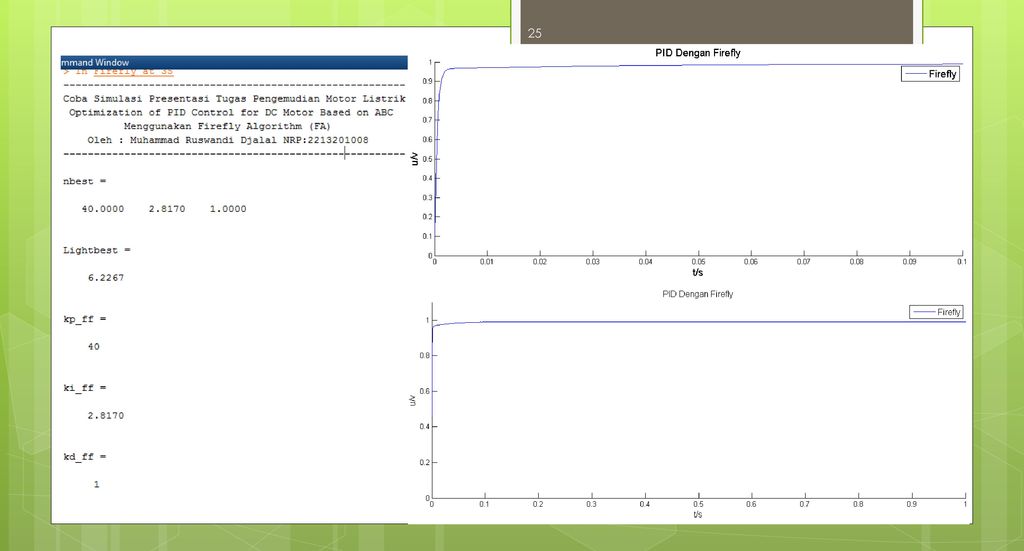
Firefly Algorithm

24
Firefly Algorithm Best Firefly Inisialisasi Kunang-Kunang
Perpindahan (Proses) Best Firefly Konsep : Kunang-Kunang akan tertarik pada yang lebih terang
 Best Firefly. Konsep : Kunang-Kunang akan tertarik pada yang lebih terang.")
26
Cuckoo Search Algorithm

27
Cuckoo Search Algorithm
Inisialisasi Sarang Pencarian (Proses) Best Nest Konsep : Menempatkan telurnya di sarang burung lain
 Best Nest. Konsep : Menempatkan telurnya di sarang burung lain.")
29
Bat Algorithm

30
Bat Algorithm Posisi Terbaik Inisialisasi Populasi Pencarian (Proses)
Konsep : terbang di kegelapan malam mencari makanan tanpa menabrak sesuatu apapun (Kemampuan Ekolokasi)
")
32
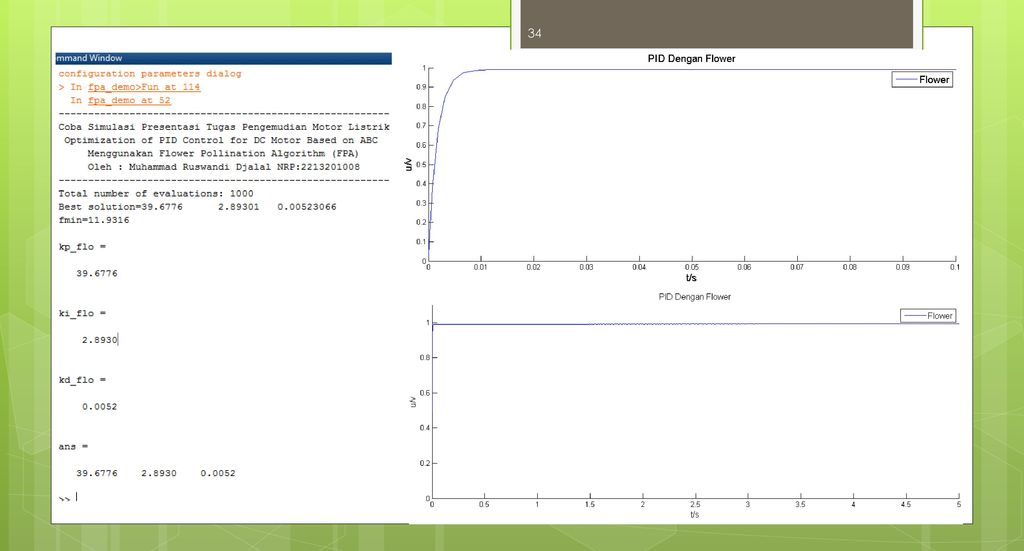
Flower Pollination Algorithm

33
Flower Pollination Algorithm
Inisialisasi Populasi Flowers Random (Proses) Best Solution Konsep : terinspirasi dari alam sekitar, yaitu proses pernyebukan bunga (Biotik & abiotik)
 Best Solution. Konsep : terinspirasi dari alam sekitar, yaitu proses pernyebukan bunga (Biotik & abiotik)")
35
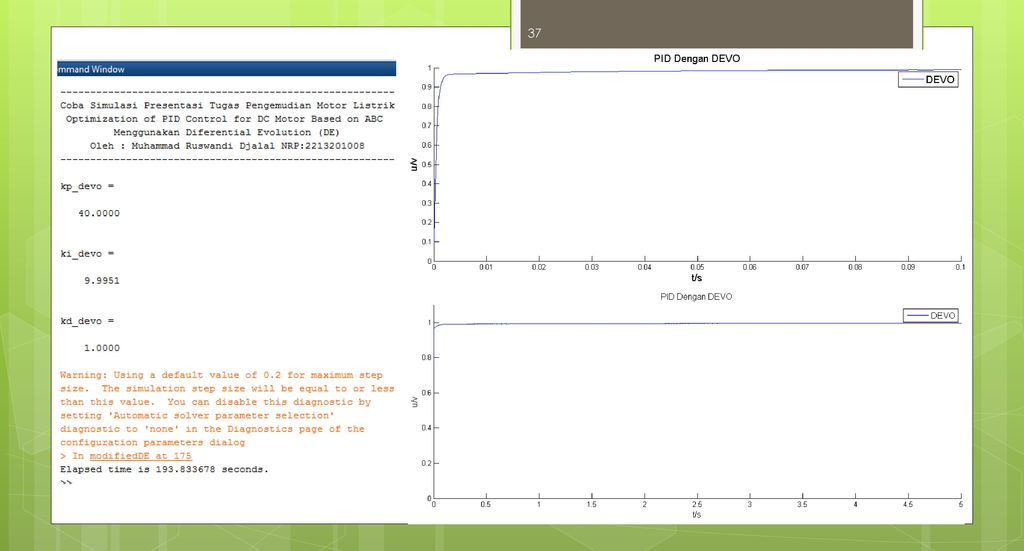
Differential Evolution

36
Differential Evolution
Inisialisasi Populasi Mutasi Populasi Populasi Baru Konsep : Terinspirasi dari evolusi biologis berbasis populasi yang menggunakan siklus perulangan dari rekombinasi dan seleksi untuk mengarahkan populasi mencari nilai optimum

38
Ant Colony Optimization

39
Ant Colony Optimization
Inisialisasi tour Best rute Konsep : Menemukan jalur terpendek antara sarang dan sumber makanan dengan mengikuti jejak feromon

41
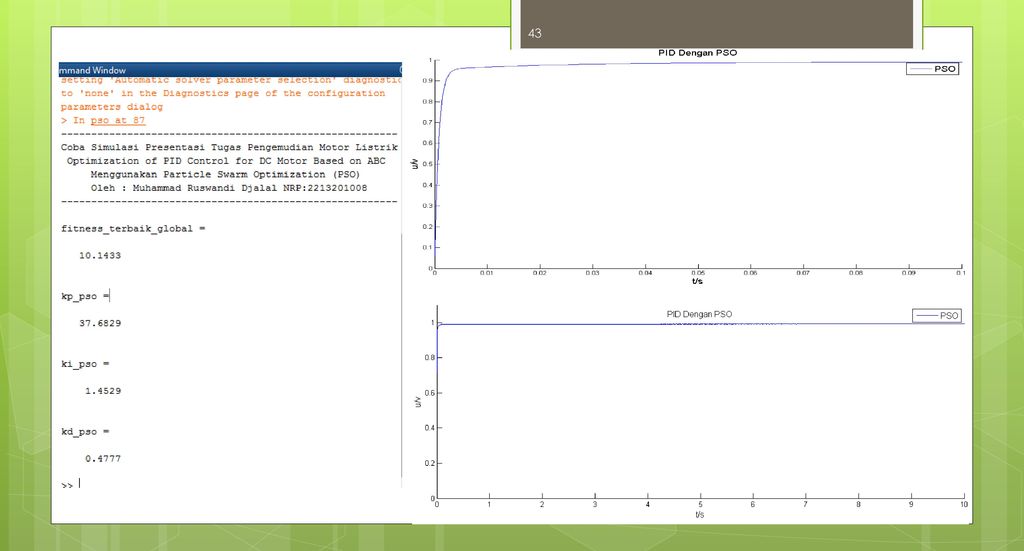
Particle Swarm Optimization

42
Particle Swarm Optimization
Inisialisasi Partikel Random (Proses) Best Position Konsep : meniru proses alam dalam berkomunikasi satu sama lain dalam berkumpul, migrasi, atau berburu
 Best Position. Konsep : meniru proses alam dalam berkomunikasi satu sama lain dalam berkumpul, migrasi, atau berburu.")
44
Imperialist Competitive Algorithm

45
Imperialist Competitive Algorithm
Inisialisasi Empire Kompetisi (Proses) Best Empire konsep : kompetisi kerajaan untuk memperoleh kekuasaan terbesar
 Best Empire. konsep : kompetisi kerajaan untuk memperoleh kekuasaan terbesar.")
47
Ant Colony Optimization Imperialist Competitive Alg.
Param. Firefly Algorithm Cuckoo Bat Flower Diff. Evolution Ant Colony Optimization Particle Swarm Opt. Imperialist Competitive Alg. Kp 40 4.36 Ki 2.8170 9.1 7.2255 2.8930 9.9951 9.1684 1.4529 0.0953 Kd 1 0.59 0.0648 0.0052 0.9775 0.4777

48
Sekian...

Presentasi serupa












>")






 dan Pembelajaran Konvensional.>")


 Mata kuliah: K0194-Pemodelan Matematika Terapan Tahun: 2008.>")


>")

