Download presentation
1
Sistem Kontrol – 8 Review, Transfer Fungsi, Diagram Blok, Dasar SisKon
Dimas Firmanda Al Riza, ST, M.Sc

2
Materi sebelum UTS (BDA)
Pendahuluan Sistem Kontrol Pemodelan Matematik Transformasi Laplace Fungsi Transfer Perilaku Dinamik Sistem Orde 1 dan 2 Respon Sistem

3
Materi setelah UTS DFA – Materi 8 Review
Dasar sistem kontrol Pemodelan matematika Transformasi laplace Fungsi transfer Perilaku dinamik sistem orde pertama dan kedua Respon dinamik sistem orde pertama dan kedua Karakteristik respon dinamik sistem orde yang lebih tinggi (Teori Poles dan Zero) Sistem Kontrol Feedback Karakteristik sistem kontrol umpan balik Contoh sistem kontrol umpan balik Instrumentasi sistem kontrol Beberapa karakteristik sistem kontrol umpan balik
 Sistem Kontrol Feedback. Karakteristik sistem kontrol umpan balik. Contoh sistem kontrol umpan balik. Instrumentasi sistem kontrol. Beberapa karakteristik sistem kontrol umpan balik.")
4
Materi setelah UTS DFA – Materi 9 Analisa Kestabilan
Kriteria kestabilan umum Kriteria kestabilan Routh-Hurwitz Metode substitusi langsung Perancangan Sistem Kontrol dengan Metode Root- Locus Dasar teori diagram Root-Locus (Tempat kedudukan akar) Plot Root-Locus dengan Matlab Perancangan Kompensator Kompensator Phase-Lead Kompensator Phase-Lag Kompensator Lag-Lead
 Plot Root-Locus dengan Matlab. Perancangan Kompensator. Kompensator Phase-Lead. Kompensator Phase-Lag. Kompensator Lag-Lead.")
5
Materi setelah UTS DFA – Materi 10
Perancangan Sistem Kontrol dengan Metode Root-Locus Dasar teori diagram Root-Locus (Tempat kedudukan akar) Plot Root-Locus dengan Matlab Kompensasi Lead, Lag, Lead-Lag Perancangan Kontroller PID
 Plot Root-Locus dengan Matlab. Kompensasi Lead, Lag, Lead-Lag. Perancangan Kontroller PID.")
6
Materi setelah UTS DFA – Materi 11
Perancangan Sistem Kontrol dengan Metode Respon-Frekuensi Diagram Bode Plot Kutub Kriteria kestabilan Nyquist Kompensasi Lead, Lag, Lead-Lag Kontroler PID dan Modifikasi Pengenalan Ziegler-Nichols Rules untuk tuning kontroler PID Desain PID dengan pendekatan respon frekuensi

7
Materi setelah UTS YHD – Materi 12, 13, 14
Pemodelan dengan menggunakan data kuantitatif Neural Network Teorema Fuzzy Kontrol Fuzzy

8
Pustaka Dale E. Seborg et al., “Process Dynamics and Control”, Wiley Series in Chemical Engineering Katsuhiko Ogata, “Modern Control Engineering”, 5th Ed, Pearson

9
UTS

10
Materi 8 REVIEW: Definition
Controlled Variable/Control Signal/Manipulated Variable: Quantity or condition that is measured and controlled Plants: Alat atau mesin yang berfungsi untuk melakukan suatu operasi, objek fisik yang di kontrol Processes Operasi yang dikontrol (Kimia, Fisika, Biologi, dll) Systems Kombinasi komponen yang bekerja bersama untuk mencapai tujuan tertentu Disturbances Sinyal yang tidak diinginkan yang mempengaruhi output sistem Set Point Nilai yang diinginkan dari suatu variabel
 Systems. Kombinasi komponen yang bekerja bersama untuk mencapai tujuan tertentu. Disturbances. Sinyal yang tidak diinginkan yang mempengaruhi output sistem. Set Point. Nilai yang diinginkan dari suatu variabel.")
11
Tahapan Desain Sistem Kontrol
Menentukan tujuan sistem kontrol Menentukan sistem fisik/plant dan batasannya (input, output, disturbances) Menggambar diagram blok fungsional Membuat model matematika setiap sub- komponen dalam sistem kontrol Menggabungkan sub-sistem dan menyederhanakan diagram blok Melakukan teknik analisa dan desain sistem kontrol Menguji model sistem kontrol yang telah dibuat Implementasi
 Menggambar diagram blok fungsional. Membuat model matematika setiap sub- komponen dalam sistem kontrol. Menggabungkan sub-sistem dan menyederhanakan diagram blok. Melakukan teknik analisa dan desain sistem kontrol. Menguji model sistem kontrol yang telah dibuat. Implementasi.")
12
Diagram Blok

13
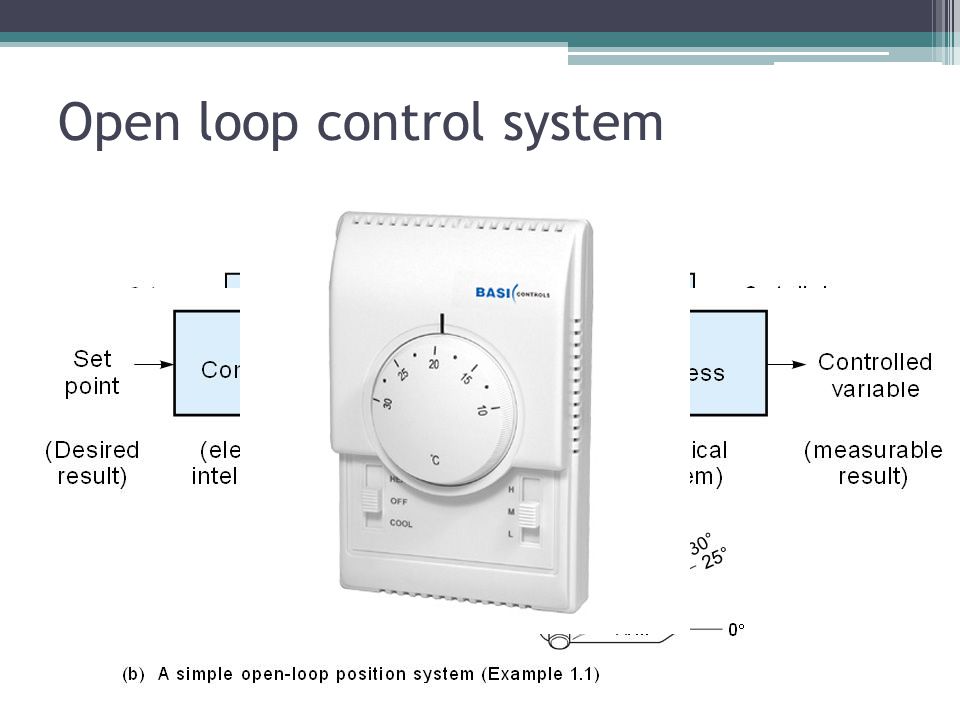
Open loop control system
14
Closed-loop control system

15
Contoh aplikasi sistem kontrol sederhana: Kontrol temperatur pada proses komposting
B C D

16
Sistem Kontrol yang lebih kompleks

17
Hirarki Aktivitas Sistem Kontrol
Elektronika dan Instrumentasi

18
Klasifikasi Kontroler Industri
Two-position or on-off controllers Proportional controllers Integral controllers PI controllers PD controllers PID controllers Fuzzy Logic controllers

19
Sistem Kontrol On-Off

20
Kontroler Proporsional

21
Kontroler Integral

22
Sistem Kontrol PI

23
Sistem Kontrol PD

24
Sistem Kontrol PID

25
Pemodelan Matematika Desain sistem kontrol dapat dilakukan antara lain dengan: Controller tuning/Ad hoc approach Model based approach/Analytical Knowledge based approach (i.e: Fuzzy control, NN) Model dapat direpresentasikan dalam beberapa bentuk, antara lain: Transfer Function transient /frequency response analysis of SISO, linear, time invariant system Nyquist Stab.Cri. Bode plot, Root Loc. State Space (State Variable Model) Optimal CS, Robust CS Classical cs Modern CS
 Model dapat direpresentasikan dalam beberapa bentuk, antara lain: Transfer Function transient /frequency response analysis of SISO, linear, time invariant system Nyquist Stab.Cri. Bode plot, Root Loc. State Space (State Variable Model) Optimal CS, Robust CS. Classical cs. Modern CS.")
26
Sekilas Pemodelan dalam bentuk state space
Tulis di papan

27
Konsep dasar Pemodelan dan Fungsi Transfer
Tulis di papan Mengapa perlu Transformasi Laplace? Agar dapat menyelesaikan model matematika kompleks yang berhubungan dengan persamaan differensial dan integral konvolusi dengan cara perhitungan aljabar biasa setelah dibuat domain Laplace-nya

28
Partial Fraction Expansion Revisited

29
Prosedur Umum Penyelesaian ODE dengan Laplace

30
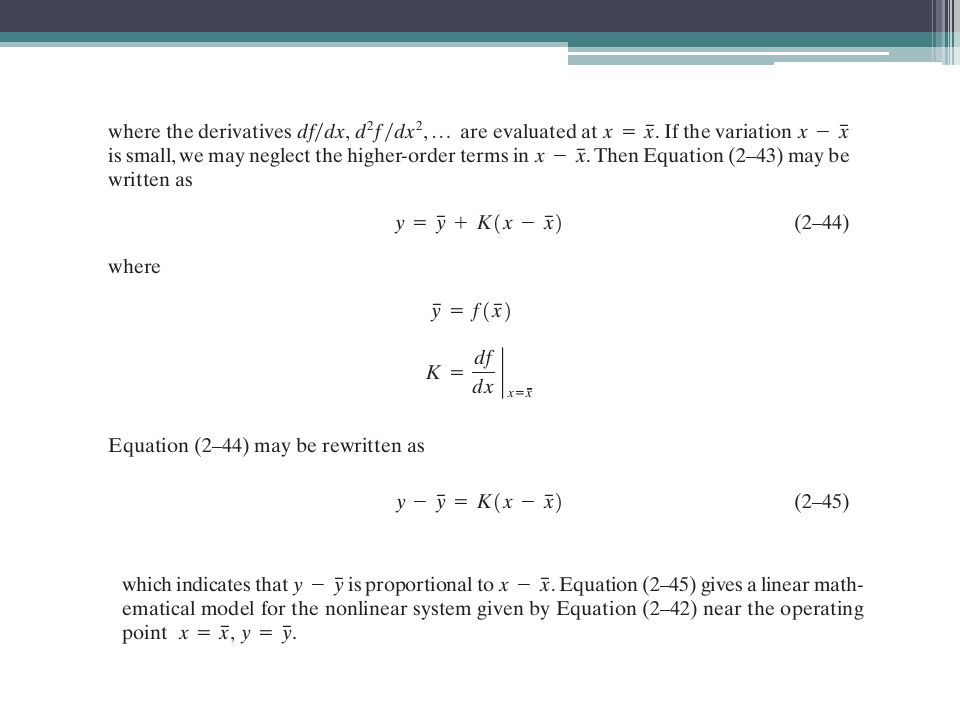
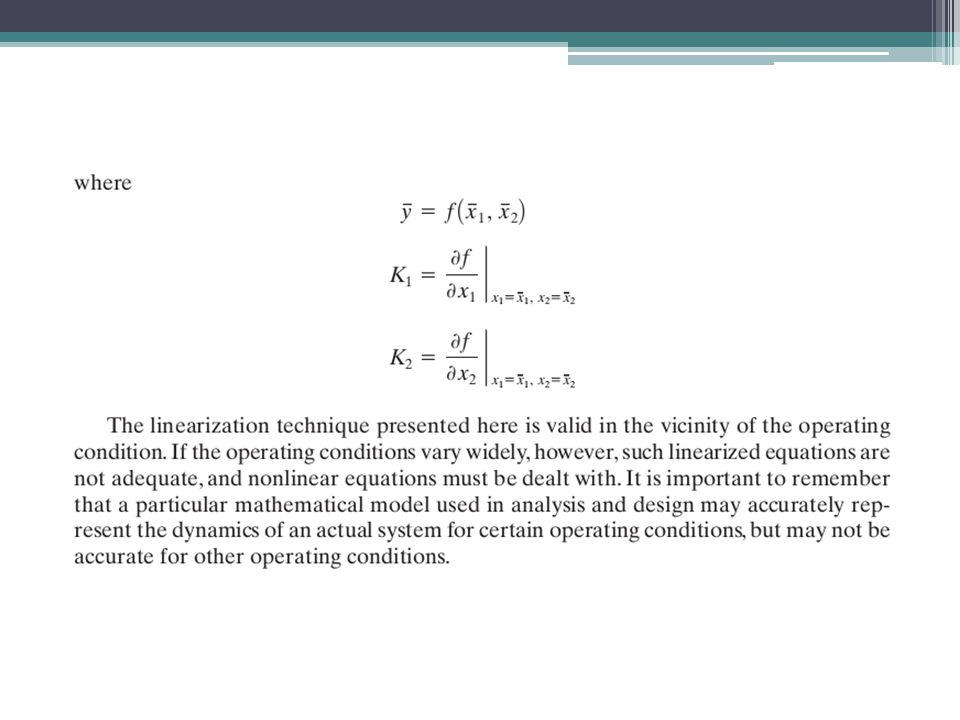
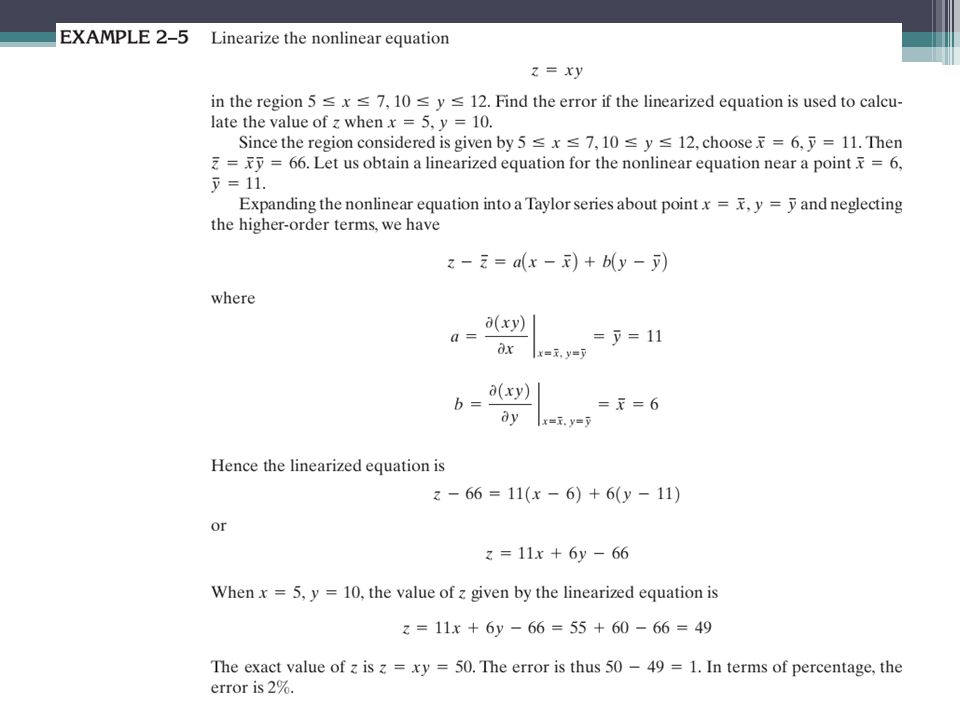
Linearisasi sistem non Linear

35
Perilaku Dinamik Sistem Orde 1 & 2
Skip

36
Karakteristik dinamik sistem orde tinggi
Diagram blok dan penyederhanaannya

37
Karakteristik sistem kontrol feedback

38
Pengenalan Matlab untuk penyelesaian problem Sistem Kontrol
Reduksi/penyederhanaan fungsi transfer (Matlab=ObtainTF.m) Konversi Fungsi transfer ke SS
 Konversi Fungsi transfer ke SS.")
39
Thank’s












 Tim Penyusun: Ridha Iskandar,Ssi.,S.Kom.,MM Irwan Arifin, Ssi.,MM Muhammad.>")









