Upload presentasi
1
METODE TEMPAT KEDUDUKAN AKAR (ROOT LOCUS)
")
2
Teknik untuk Menganalisis Stabilitas
Hurwitz • Kriteria Aljabar (stabilitas mutlak) • Grafik •Kedudukan Akan-akar Routh Fractions Bode Nyquist Black Evans
 • Grafik. •Kedudukan Akan-akar. Routh. Fractions. Bode. Nyquist. Black. Evans.")
3
PENDAHULUAN Karakteristik dasar tanggap transien sistem loop tertutup ditentukan oleh kutub-kutub loop tertutup. Kutub-kutub loop tertutup pada bidang s adalah akar-akar persamaan karakteristik. Untuk mencarinya kita perlu menguraikan polinomial karakteristik atas faktor-faktornya, yang umumnya sulit apabila derajat polinomialnya lebih tinggi dari dua. Metode tempat kedudukan akar merupakan metode yang menggambarkan akar-akar persamaan karakteristik untuk semua harga dari suatu parameter sistem. Akar-akar untuk suatu harga tertentu dari parameter terletak pada grafik yang diperoleh.

4
(a) Sistem Loop Tertutup. (b) Fungsi Alih Ekuivalen
 Sistem Loop Tertutup. (b) Fungsi Alih Ekuivalen")
5
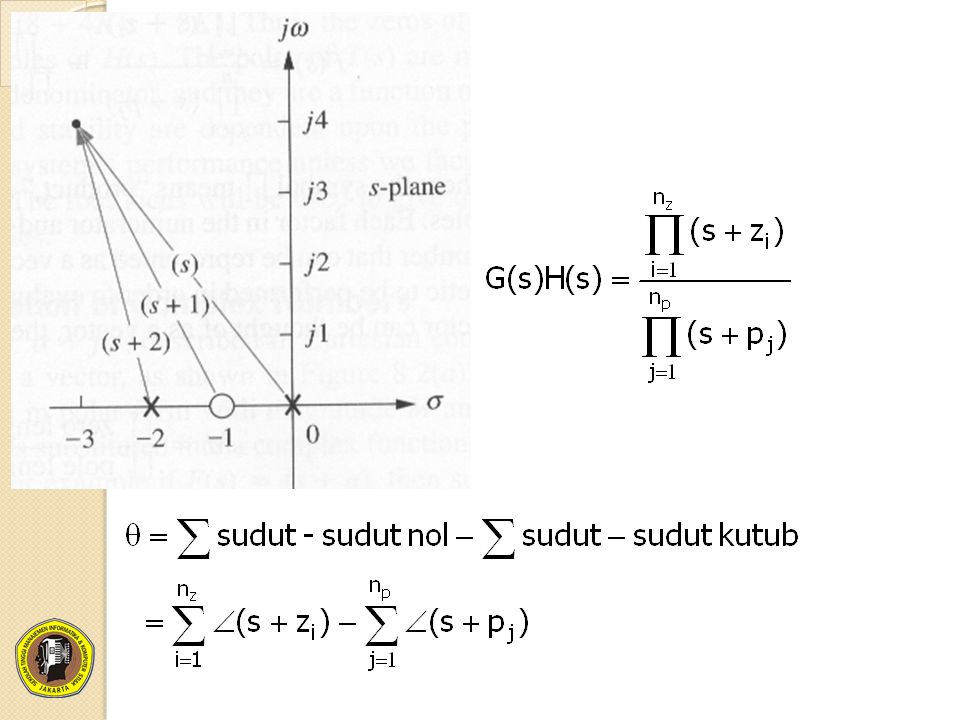
ROOT LOCUS Persamaan karakteristik Loop-Tertutup: 1 + KG(s)H(s) = 0
Penguatan K = parameter rancangan G(s)H(s) = penguatan loop dengan: zi , i = 1, 2, …, nz adalah nol-nol sistem loop terbuka pj , j = 1, 2, …, np adalah kutub-kutub sistem loop terbuka
H(s) = penguatan loop. dengan: zi , i = 1, 2, …, nz adalah nol-nol sistem loop terbuka. pj , j = 1, 2, …, np adalah kutub-kutub sistem loop terbuka.")
7
DIAGRAM TEMPAT KEDUDUKAN AKAR-AKAR
Menentukan kedudukan akar kutub-kutub loop tertutup (root loci) ketika K berubah antara o sampai . Dari persamaan: 1 + KG(s)H(s) Karena G(s)H(s) adalah besaran kompleks, maka dapat dipisahkan menjadi dua persamaan karakteristik: 1. Syarat sudut: 2. Syarat besar:
 ketika K berubah antara o sampai . Dari persamaan: 1 + KG(s)H(s) Karena G(s)H(s) adalah besaran kompleks, maka dapat dipisahkan menjadi dua persamaan karakteristik: 1. Syarat sudut: 2. Syarat besar:")
8
METODE TEMPAT KEDUDUKAN AKAR
Metode ini memberikan prosedur grafis yang efektif untuk mencari akar-akar polinomial dalam studi sistem fisik. Gagasan dasar adalah harga s yang membuat fungsi alih loop terbuka sama dengan -1 harus memenuhi persamaan karakteristik sistem. Jika penguatan diubah dari nol sampai tak terhingga, memungkinkan kita untuk mencari kutub-kutub loop tertutup dan kutub dan nol loop terbuka dengan penguatan sebagai parameter. Dalam merancang sistem kendali linier, metode tempat kedudukan akar terbukti cukup berguna untuk memodifikasi kutub dan nol loop terbuka sehingga tanggap memenuhi spesifikasi kinerja sistem.

9
s1 s1-p1 s-plane s1-z1 q2 q1 q3 z1 p1 p2

10
Contoh:

11
SISTEM ORDE KEDUA SEDERHANA
Fungsi alih loop terbuka sistem adalah: Fungsi alih loop tertutupnya adalah: + - R(s) C(s)
 C(s)")
12
Persamaan karakteristik sistem ini adalah:
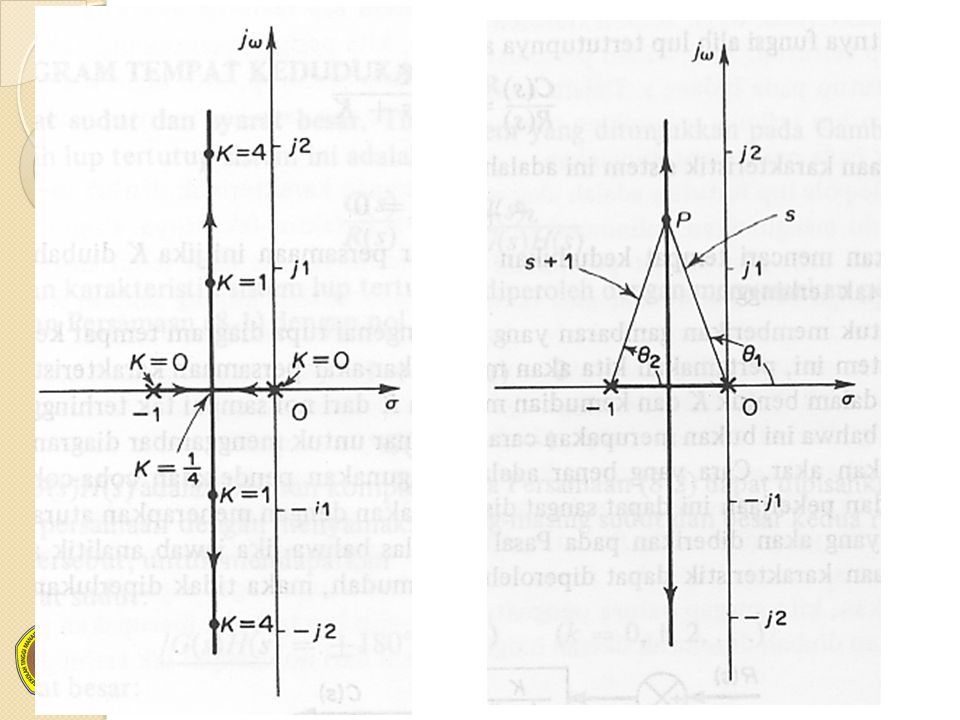
Kita akan mencari tempat kedudukan akar-akar persamaan ini jika K diubah dari nol sampai tak terhingga. K=0 adalah sama dengan kutub-kutub dari G(s)H(s). Jika K diperbesar dari nol sampai ¼, maka kutub-kutub loop tertutup bergerak menuju titik (-½, 0). Untuk harga K dari nol sampai ¼, semua kutub loop tertutup terletak pada sumbu nyata (tanggap impulse tidak berosilasi). Pada K= ¼, kedua kutub loop tertutup nyata tersebut bersatu (sistem redaman kritis)
H(s). Jika K diperbesar dari nol sampai ¼, maka kutub-kutub loop tertutup bergerak menuju titik (-½, 0). Untuk harga K dari nol sampai ¼, semua kutub loop tertutup terletak pada sumbu nyata (tanggap impulse tidak berosilasi). Pada K= ¼, kedua kutub loop tertutup nyata tersebut bersatu (sistem redaman kritis)")
14
Jika K > ¼ , maka kutub-kutub loop tertutup bergerak meninggalkan sumbu nyata, menjadi kompleks.
Karena bagian nyata konstan, maka kutub-kutub loop tertutup bergerak sepanjang garis s = -½ (sistem redaman kurang). Syarat sudut:
. Syarat sudut:")
15
Tinjau titik P, besaran kompleks s dan s+1 , masing-masing mempunyai sudut 1 dan 2 ,dan besar masing-masing adalah |s| dan |s+1|. Jumlah sudut 1 dan 2 adalah 180°. Jika titik P terletak pada sumbu nyata antara 0 dan -1, maka 1 = 180° dan 2 = 0°. Jika titik P bukan merupakan titik-titik pada tempat kedudukan akar, maka jumlah antara 1 dan 2 tidak sama dengan 180°(2k+1). Jadi titik-titik yang tidak terletak pada tempat kedudukan akar, tidak memenuhi syarat sudut (bukan merupakan kutub loop tertutup untuk setiap harga K).
. Jadi titik-titik yang tidak terletak pada tempat kedudukan akar, tidak memenuhi syarat sudut (bukan merupakan kutub loop tertutup untuk setiap harga K).")
16
Jika kutub-kutub loop tertutup ditentukan dari tempat kedudukan akar, maka harga K yang berkaitan ditentukan dengan syarat besar. Jika loop tertutup yang dipilih adalah s= - ½ + j2 , maka harga K untuk kondisi ini diperoleh dari: atau Karena kutub-kutub saling berpasangan (konjugasi komplk), jika salah satu diantaranya diperoleh, misal s= - ½ + j2 maka yang lain dapat diperoleh secara otomatis.
, jika salah satu diantaranya diperoleh, misal s= - ½ + j2 maka yang lain dapat diperoleh secara otomatis.")
17
Perubahan K pada perilaku tanggap transien sistem orde dua:
Kenaikan harga K akan memperkecil rasio redaman , sehingga memperbesar overshoot dari tanggap. Kenaikan K juga memperbesar frekuensi alamiah. Kutub-kutub loop tertutup selalu disebelah kiri sumbu khayal bidang s, jadi sampai berapapun K diperbesar, sistem selalu stabil.

19
Tempat Kedudukan Penguatan Konstan
+ - R(s) C(s) Tempat kedudukan penguatan konstan dari sistem diperoleh dari syarat besar atau Titik-titik pada bidang kompleks yang memenuhi persamaan diatas untuk suatu harga K tertentu membentuk suatu tempat kedudukan penguatan konstan.
 C(s) Tempat kedudukan penguatan konstan dari sistem diperoleh dari syarat besar. atau. Titik-titik pada bidang kompleks yang memenuhi persamaan diatas untuk suatu harga K tertentu membentuk suatu tempat kedudukan penguatan konstan.")
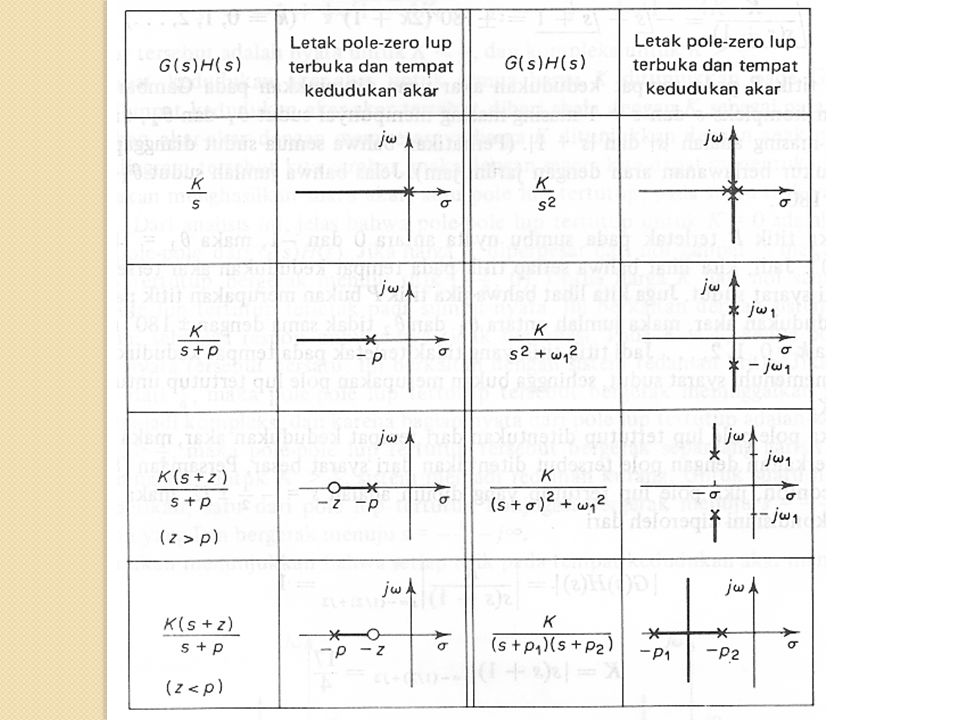
20
Diagram tempat kedudukan dari: |G(s)H(s)| = konstan adalah berupa lingkaran dengan pusat di titik asal. Tempat kedudukan untuk: G(s)H(s) = 180°(2k + 1) berada pada sumbu nyata negatif dari bidang G(s)H(s) Tempat kedudukan akar dan tempat kedudukan penguatan konstan pada bidang s adalah pemetaan konformal dari tempat kedudukan G(s)H(s) = 180°(2k + 1) dan |G(s)H(s)| = konstan pada bidang G(s)H(s).
H(s) = 180°(2k + 1) berada pada sumbu nyata negatif dari bidang G(s)H(s) Tempat kedudukan akar dan tempat kedudukan penguatan konstan pada bidang s adalah pemetaan konformal dari tempat kedudukan G(s)H(s) = 180°(2k + 1) dan |G(s)H(s)| = konstan pada bidang G(s)H(s).")
21
SOAL 1 Gambarkan diagram tempat kedudukan akar dan tempat kedudukan penguatan konstan untuk sistem berikut: Jawab: Karena konfigurasi kutub-nol adalah simetri terhadap sumbu nyata, maka tempat kedudukan penguatan konstan juga simetri terhadap sumbu nyata.

22
SOAL 2 Gambarkan diagram tempat kedudukan akar dan tempat kedudukan penguatan konstan untuk sistem berikut: Jawab: Karena konfigurasi kutub pada bidang s adalah simetri terhadap sumbu nyata dan garis yang sejajar sumbu khayal yang melalui titik (s=-1, w=0), maka tempat kedudukan penguatan konstan juga simetri terhadap garis w=0 (sumbu nyata) dan garis s=-1.
, maka tempat kedudukan penguatan konstan juga simetri terhadap garis w=0 (sumbu nyata) dan garis s=-1.")
23
Analisis Sistem dengan Root Locus
+ - R(s) C(s) Pertama, carilah persamaan karakteristiknya - Syarat besar menjadi: - Syarat sudut untuk sistem diatas adalah:
 C(s) Pertama, carilah persamaan karakteristiknya. - Syarat besar menjadi: - Syarat sudut untuk sistem diatas adalah:")
24
Tentukan asimtot tempat kedudukan akar
Asistot tempat kedudukan akar adalah jika s mendekati tak terhingga Sehingga syarat sudut menjadi: atau: Karena sudut berulang jika k diubah, maka ada tiga asimtot 60°, -60° dan 180° (sumbu nyata negatif).
.")
25
Tentukan titik potong tempat kedudukan akar dengan sumbu khayal.
Titik-titik ini dapat diperoleh dari kriteria kestabilan Routh dari persamaan karakteristik sistem: s3+3s2+2s +K = 0 Harga K yang membuat koefisien s1 pada kolom pertama sama dengan nol adalah K = 6. Titik potong pada sumbu khayal diperoleh dengan menggunakan persamaan dari baris s2, yaitu:

26
yang menghasilkan: Jadi tempat kedudukan akar memotong sumbu khayal di: Hingga penguatan pada titik potong ini adalah K = 6.

27
Diagram tempat kedudukan akar-akar

28
Contoh Apliasi Metode Root Locus









 Tim Penyusun: Ridha Iskandar,Ssi.,S.Kom.,MM Irwan Arifin, Ssi.,MM Muhammad.>")


, Time-to-peak (Tp),>")






 Naviul Hasanah ( )>")
>")
