Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
MOTOR INDUKSI TIGA PHASA

2
MOTOR INDUKSI TIGA PHASA
-. Motor induksi adalah suatu mesin listrik yang merubah energi listrik menjadi energi gerak dengan menggunakan gandengan medan listrik dan mempunyai slip antara medan stator dan medan rotor. -. Motor induksi merupakan motor yang paling banyak kita jumpai dalam industri.

3
Konstruksi motor tiga phasa

4
Bagian Motor Induksi Tiga Phasa

5
Stator -. Stator adalah bagian dari mesin yang tidak berputar dan terletak pada bagian luar. Dibuat dari besi bundar berlaminasi dan mempunyai alur – alur sebagai tempat meletakkan kumparan.

6
Rotor -. Rotor sangkar Adalah bagian dari mesin yang berputar bebas dan letaknya bagian dalam. Terbuat dari besi laminasi yang mempunayi slot dengan batang alumunium / tembaga yang dihubungkan singkat pada ujungnya.

7
Rotor Sangkar

8
Konstruksi rotor sangkar ( squarrel-cage rotor )
")
9
Rotor kumparan ( wound rotor )
Kumparan dihubungkan bintang dibagian dalam dan ujung yang lain dihubungkan dengan slipring ke tahanan luar. Kumparan dapat dikembangkan menjadi pengaturan kecepatan putaran motor. Pada kerja normal slipring hubung singkat secara otomatis, sehingga rotor bekerja seperti rotor sangkar.

10
Jenis Rotor Belitan

11
Konstruksi rotor kumparan ( wound rotor ).
.")
12
Keuntungan motor tiga phasa
-.Konstruksi sangat kuat dan sederhana terutama bila motor dengan rotor sangkar. -. Harganya relatif murah dan kehandalannya tinggi. -. Effesiensi relatif tinggi pada keadaan normal, tidak ada sikat sehingga rugi gesekan kecil. -. Biaya pemeliharaan rendah karena pemeliharaan motor hampir tidak diperlukan.

13
KERUGIAN PENGGUNAAN MOTOR INDUKSI
Kecepatan tidak mudah dikontrol Power faktor rendah pada beban ringan Arus start biasanya 5 sampai 7 kali dari arus nominal

14
PRINSIP KERJA MOTOR (Gaya Lorentz)
F = Gaya B = Kerapatan fluks I = Arus L = Konduktor Arus listrik (i) yang dialirkan di dalam suatu medan magnet dengan kerapatan Fluks (B) akan menghasilkan suatu gaya Sebesar:
 yang dialirkan di dalam. suatu medan magnet dengan kerapatan. Fluks (B) akan menghasilkan suatu gaya. Sebesar:")
15
Nilai F Dipengaruhi Banyaknya Lilitan ( N )
")
16
Linear Motor

17
Prinsip kerja 3 Phasa 1. Bila sumber tegangan tiga phasa dipasang pada kumpara stator, maka pada kumparan stator akan timbul medan putar dengan kecepatan ns = kecepatan sinkron f = frekuensi sumber p = jumlah kutup

18
2. Medan putar stator akan memotong konduktor yang terdapat pada sisi rotor, akibatnya pada kumparan rotor akan timbul tegangan induksi ( ggl ) sebesar E = tegangan induksi ggl f = frekkuensi N = banyak lilitan Q = fluks

19
3. Karena kumparan rotor merupakan kumparan rangkaian tertutup, maka tegangan induksi akan menghasilkan arus ( I ). 4. Adanya arus dalam medan magnet akan menimbulkan gaya ( F ) pada rotor. 5. Bila torsi awal yang dihasilkan oleh gaya F pada rotor cukup besar untuk memikul torsi beban, maka rotor akan berputar searah dengan arah medan putar stator.
. 4. Adanya arus dalam medan magnet akan menimbulkan gaya ( F ) pada rotor. 5. Bila torsi awal yang dihasilkan oleh gaya F pada rotor cukup besar untuk memikul torsi beban, maka rotor akan berputar searah dengan arah medan putar stator.")
20
6. Untuk membangkitkan tegangan induksi E2s agar tetap ada, maka diperlukan adanya perbedaan relatif antara kecepatan medan putar stator ( ns )dengan kecepatan putar rotor ( nr ). 7.Perbedaan antara kecepatan nr dengan ns disebut dengan slip ( S ) yang dinyatakan dengan persamaan: 8.Jika ns = nr tegangan akan terinduksi dan arus tidak mengalir pada rotor, dengan demikian tidak ada torsi yang dapat dihasilkan. Torsi suatu motor akan timbul apabila ns > nr. 9.Dilihat dari cara kerjanya motor tiga phasa disebut juga dengan motor tak serempak atau asinkron.
dengan kecepatan putar rotor ( nr ). 7.Perbedaan antara kecepatan nr dengan ns disebut dengan slip ( S ) yang dinyatakan dengan persamaan: 8.Jika ns = nr tegangan akan terinduksi dan arus tidak mengalir pada rotor, dengan demikian tidak ada torsi yang dapat dihasilkan. Torsi suatu motor akan timbul apabila ns > nr. 9.Dilihat dari cara kerjanya motor tiga phasa disebut juga dengan motor tak serempak atau asinkron..")
21
Contoh soal Motor enam kutub disuplai dari sumber 60 Hz fasa tiga. Kecepatan rotor pada beban penuh adalah 1140 rpm. Tentukan: a) kecepatan sinkron dari medan magnet b) slip per unit c) kecepatan rotor untuk sebuah hasil beban yang dikurangi di slip s = 0,02
 kecepatan sinkron dari medan magnet. b) slip per unit. c) kecepatan rotor untuk sebuah hasil. beban yang dikurangi di slip s = 0,02.")
22
Penyelesaian Diketahui : p = 6 f = 60 Hz nr = 1140 rpm
Kecepatan sinkron

23
Slip pada beban penuh

24
Kecepatan putar rotor bila s = 0,02

25
TEGANGAN TERINDUKSI PADA ROTOR
Pada saat standstill (slip = 100%) medan putar rotor maksimum Fluks dalam stator sama dengan dalam rotor tegangan yang dibangkitkan maksimum, tergantung pada belitan rotor Tegangan yang diinduksikan ke rotor tergantung pada ratio belitan Frekuensi rotor sama dengan frekuensi stator
 medan putar rotor maksimum. Fluks dalam stator sama dengan dalam rotor. tegangan yang dibangkitkan maksimum, tergantung pada belitan rotor. Tegangan yang diinduksikan ke rotor tergantung pada ratio belitan. Frekuensi rotor sama dengan frekuensi stator.")
26
Dapat disimpulkan bahwa:
Pada saat bergerak: medan putar rotor maksimum fluks dalam stator sama dengan dalam rotor tegangan yang dibangkitkan berkurang sesuai dengan slip yang terjadi Frekuensi rotor semakin berkurang sesuai dengan penurunan slip Dapat disimpulkan bahwa: Er = s x EBR Er tegangan induksi rotor EBR tegangan induksi rotor saat standstill fR = s x fS fR frekuensi rotor fS frekuensi stator

27
Contoh Soal A three-phase 60 Hz four-pole 220-V wound induction motor has a stator winding Delta connected and a rotor winding Y connected. The rotor has 40% as many turns as the stator. For a rotor speed of 1710 r/min, calculate: The slip The block rotor-induced voltage per phase EBR The rotor-induced voltage per phase ER The voltage between rotor terminals The rotor frequency

28
Solution The slip

29
The block rotor-induced voltage per phase EBR
The rotor-induced voltage per phase ER

30
The voltage between rotor terminals
The rotor frequency

31
RANGKAIAN ROTOR Di rotor dalam tiap kondisi diperoleh kesimpulan:
Arus short circuit rotor dibatasi oleh impedansi rotor Impedansi terdiri dari dua komponen yaitu: Resistansi rotor RR Reaktansi diri sXBR (XBR Reaktansi diri rotor pada stand-still) Selama reaktansi diri merupakan fungsi dari frekuensi, reaktansi proportional terhadap slip
 Selama reaktansi diri merupakan fungsi dari frekuensi, reaktansi proportional terhadap slip.")
32
Sebagai hasil, arus rotor menjadi
bila, maka,

33
jika penyebut dan pembilang dibagi dengan s, maka:
Pembagian dengan s merubah titik referensi dari rotor ke rangkaian stator sehingga rangkaian ekuivalen rotor per fasa menjadi:

34
Untuk tujuan menyamakan dengan rangkaian resistansi rotor RR yang sebenarnya, maka RR/s dipisah dalam dua komponen: sehingga rangkaian ekuivalen rotor menjadi sebagai berikut:

35
RANGKAIAN EKUIVALEN ROTOR

36
KOMPONEN DAYA PADA ROTOR
ROTOR POWER INPUT (RPI) ROTOR COPPER LOSS (RCL) ROTOR POWER DEVELOPED (RPD) OUT-PUT POWER Ketiga komponen daya tersebut didapat dari persamaan: bila ruas kanan dan ruas kiri dari persamaan ini dikalikan dengan IR2, maka:
 ROTOR COPPER LOSS (RCL) ROTOR POWER DEVELOPED (RPD) OUT-PUT POWER. Ketiga komponen daya tersebut didapat dari persamaan: bila ruas kanan dan ruas kiri dari persamaan ini dikalikan dengan IR2, maka:")
37
RPI = RCL + RPD Dimana: ROTOR POWER INPUT (RPI)
ROTOR COPPER LOSS (RCL) ROTOR POWER DEVELOPED (RPD) RPI = RCL + RPD
 ROTOR POWER DEVELOPED (RPD) RPI = RCL + RPD.")
38
HUBUNGAN RPD DENGAN RPI

39
HUBUNGAN RCL DENGAN RPI

40
DAYA OUT-PUT Daya yang dibangkitkan di poros rotor dapat dinyatakan dengan persamaan: Pout = RPD - Protasional Protasional adalah daya hilang yang disebabkan oleh gaya gesekan (friksi) dan angin (kipas pendingin)
 dan angin (kipas pendingin)")
41
TORSI YANG DIBANGKITKAN
Torsi elektromekanik Te adalah torsi yang dibangkitkan di celah udara yang dapat dinyatakan dengan persamaan:

42
Torsi poros Td adalah torsi yang dibangkitkan di poros rotor yang dapat dinyatakan dengan persamaan:
Bila rugi Protasional diabaikan maka Td dapat dinyatakan dengan persamaan:

43
RANGKAIAN STATOR Terdiri dari
Tahanan stator Rs Reaktasi induktif Xs Rangkaian magnetisasi (tidak boleh diabaikan seperti trafo karena rangkaian ini menyatakan celah udara) Rangkaian stator per fasa dinyatakan pada gambar berikut:
 Rangkaian stator per fasa dinyatakan pada gambar berikut:")
44
DIAGRAM RANGKAIAN STATOR

45
Bila tegangan konstan Rugi inti dianggap konstan mulai dari kondisi tanpa beban sampai beban penuh Rc dapat dihilangkan dari diagram rangkaian tetapi: rugi inti tetap ada dan diperhitungkan pada efisiensi Arus magnetisasi pada motor sekitar 30% s/d 50% dari arus nominal Reaktansi magnetisasi merupakan komponen penting pada rangkaian pengganti Sehingga penyederhanaan diagram rangkaian stator menjadi seperti gambar berikut:

46
PENYEDERHANAAN DIAGRAM RANGKAIAN STATOR

47
PENGGABUNGAN DIAGRAM RANGKAIAN ROTOR DAN STATOR
Sisi stator sebagai referensi parameter rotor Untuk menggabung rangkaian rotor dengan rangkaian stator maka dapat digunakan konsep: “daya stator sama dengan daya rotor” Sehingga EBR harus sama dengan ES ES = a.EBR = E’BR I’R = IR/a R’R =a2.RR X’BR =a2.XBR Konstanta a merupakan transformasi tegangan stator ke rotor

48
DIAGRAM LENGKAP MOTOR INDUKSI TIAP FASA

49
ANALISA ARUS (METODE LOOP)
Dari diagram rangkaian berikut dapat dibuat dua persamaan:

50
Loop I: Loop II: Dibuat dalam bentuk matrik didapat:

51
Tentukan nilai deteminant (D) konstanta matrik, dengan:
Arus IS didapat dengan persamaan:

52
Arus IR didapat dengan persamaan:
Arus magnetisasi IM diperoleh dari: IM = IS – I’R Faktor daya motor didapat dari Cos sudut arus stator IS

53
KOMPONEN DAYA TIGA FASA
STATOR POWER INPUT (SPI) STATOR COPPER LOSS (SCL)
 STATOR COPPER LOSS (SCL)")
54
KOMPONEN DAYA TIGA FASA
ROTOR POWER INPUT (RPI) ROTOR COPPER LOSS (RCL)
 ROTOR COPPER LOSS (RCL)")
55
KOMPONEN DAYA TIGA FASA
ROTOR POWER DEVELOPED (RPD) ROTASIONAL LOSS (PR) Rugi-rugi yang disebabkan oleh gesekan dan angin OUTPUT POWER (PO) PO = RPD - PR
 ROTASIONAL LOSS (PR) Rugi-rugi yang disebabkan oleh gesekan dan angin. OUTPUT POWER (PO) PO = RPD - PR.")
56
DIAGRAM ALIR DAYA PADA MOTOR INDUKSI TIGA FASA
POUT SPI RPI RPD SCL RCL PR

57
ANALISA ARUS (METODE PENYEDERHANAAN)
Mengacu pada diagram lengkap motor induksi tiap fasa Untuk tujuan menyederhanakan analisa, pindahkan parameter XM mendekati sumber tegangan maka didapat diagram rangkaian seperti berikut:

58
PENYEDERHANAAN RANGKAIAN EKUIVALEN MOTOR INDUKSI

59
Dari rangkaian penyederhanaan didapat persamaan arus I’R sebagai berikut:
Arus pemagnetan IM sebagai berikut:

60
Faktor daya motor didapat dari Cos sudut arus stator IS
Arus stator IS sebagai berikut: Bila mengikuti gambar rangkaian maka rugi tembaga stator SCL menggunakan arus I’R. Tetapi untuk mengurangi error yang tinggi pada perhitungan efisiensi maka SCL dihitung menggunakan persamaan berikut: Perhitungan daya dan rugi-rugi yang lain sama seperti perhitungan metode LOOP Faktor daya motor didapat dari Cos sudut arus stator IS

61
EFISIENSI (h) Menyatakan perbandingan daya output dengan daya input
Bila dinyatakan dalam prosen maka,

62
Contoh Soal A three-phase 220-V 60-Hz six-pole 10-hp induction motor has following circuit parameters on a per phase basis referrred to the stator: RS = W R’R = 0.147W XS = W X’R = 0.224W X’M = 12.6W Assuming a Y-connected stator winding. The rotational losses and core loss combined amount to 262 W and may be assumed constant. For slip of 2.8 % determine: the line current and power factor the shaft torque and output horse power the efficiency

63
SOLUTION (LOOP METHODE)
the phase voltage is: the equivalent circuit is given in Figure:

64
Loop I: Loop II: Dibuat dalam bentuk matrik didapat:

65
Tentukan nilai deteminant (D) konstanta matrik, dengan:
 konstanta matrik, dengan:")
66
a. Arus IS didapat dengan persamaan:

67
Arus IR didapat dengan persamaan:
Power faktor motor (diambil dari sudut IS):
:")
68
b. The shaft torque and output horse power
Kecepatan sinkron dari motor adalah : Kecepatan rotor adalah : Kecepatan sudut rotor adalah :

69
Rotor Power Input adalah :
Rotor Power Developed adalah :

70
Power Output adalah : Pout = RPD – Protasional = 7246,776 – 262 = 6984,776 W Torsi motor adalah : Horsepower motor adalah :

71
Power loos adalah : Protasional + Core loss = W RCL = 0,028 x 7455, = W SCL = 3x23,932x 0, = 590,97 W + Total loss = 1061,72 W c. Efisiensi motor adalah :

72
SOLUTION (Penyederhanaan)
the phase voltage is: the equivalent circuit is given in Figure:

73
Arus IR didapat dengan persamaan:
Arus IM didapat dengan persamaan:

74
a. Arus Sumber IS didapat dari :
Power faktor motor (diambil dari sudut IS):
:")
75
b. The shaft torque and output horse power
Kecepatan sinkron dari motor adalah : Kecepatan rotor adalah : Kecepatan sudut rotor adalah :

76
Rotor Power Input adalah :
Rotor Power Developed adalah :

77
Power Output adalah : Pout = RPD – Protasional = 7764 – 262 = 7502 W Torsi motor adalah : Horsepower motor adalah :

78
Power loos adalah : Protasional + Core loss = W RCL = 0,028 x = W SCL = 3x25,822x 0, = W + Total loss = W c. Efisiensi motor adalah :

79
Perbandingan Kedua Metode
Arus sumber Metode Loop Metode Pendekatan

80
Perbandingan Kedua Metode
Torsi Poros dan Output Horsepower Metode Loop Metode Pendekatan

81
Perbandingan Kedua Metode
Efisiensi Metode Loop Metode Pendekatan

82
KARAKTERISTIK MOTOR INDUKSI
Rotor sangkar bajing dibuat dalam 4 kelas berdasarkan National Electrical Manufacturers Association (NEMA) Motor kelas A Mempunyai rangkaian resistansi ritor kecil Beroperasi pada slip sangat kecil (s<0,01) dalam keadaan berbeban Untuk keperluan torsi start yang sangat kecil
 Motor kelas A. Mempunyai rangkaian resistansi ritor kecil. Beroperasi pada slip sangat kecil (s<0,01) dalam keadaan berbeban. Untuk keperluan torsi start yang sangat kecil.")
83
Rotor sangkar bajing dibuat dalam 4 kelas berdasarkan National Electrical Manufacturers Association (NEMA) Motor kelas B Untuk keperluan umum, mempunyai torsi starting normal dan arus starting normal Regulasi kecepatan putar pada saat full load rendah (dibawah 5%) Torsi starting sekitar 150% dari rated Walaupun arus starting normal, biasanya mempunyai besar 600% dari full load Motor kelas C Mempunyai torsi statring yang lebih besar dibandingkan motor kelas B Arus starting normal, slip kurang dari 0,05 pada kondisi full load Torsi starting sekitar 200% dari rated Untuk konveyor, pompa, kompresor dll
 Torsi starting sekitar 150% dari rated. Walaupun arus starting normal, biasanya mempunyai besar 600% dari full load. Motor kelas C. Mempunyai torsi statring yang lebih besar dibandingkan motor kelas B. Arus starting normal, slip kurang dari 0,05 pada kondisi full load. Torsi starting sekitar 200% dari rated. Untuk konveyor, pompa, kompresor dll.")
84
Rotor sangkar bajing dibuat dalam 4 kelas berdasarkan National Electrical Manufacturers Association (NEMA) Motor kelas D Mempunyai torsi statring yang besar dan arus starting relatif rendah Slip besar Pada slip beban penuh mempunyai efisiensi lebih rendah dibandingkan kelas motor lainnya Torsi starting sekitar 300%

85
TORQUE-SPEED CURVES OF DIFFERENT NEMA STANDARD MOTORS

86
Karakteristik motor induksi

87
Kondisi-kondisi Ektrim Karakteristik Motor Induksi
Untuk mempersingkat perhitungan dan penjelasan maka dari Gambar karakteristik motor induksi dipilih kondisi-kondisi ekstrim yaitu : Kondisi starting Kondisi puncak (maksimum) Kondisi beban nominal (sudah dibahas)
 Kondisi beban nominal (sudah dibahas)")
88
Kondisi Torsi Starting (Stand still)
Dari gambar penyederhanaan rangkaian ekuivalen motor Pada saat start rotor belum berputar sehingga slip s = 1 Arus starting rotor menjadi:

89
Kondisi Torsi Maksimum
Dari gambar penyederhanaan rangkaian ekuivalen motor Pada saat arus rotor maksimum torsi akan maksimum Arus maksimum rotor pada slip sb (torsi max) terjadi bila impedansi rotor mendekati nol sehingga: Karena nilai normal RS<<Xe maka:
 terjadi bila impedansi rotor mendekati nol sehingga: Karena nilai normal RS<<Xe maka:")
90
Rotor power Input maksimum menjadi:
Masukkan nilai sb ke dalam persamaan arus saat torsi maksimum, didapat arus rotor maksimum yaitu: Rotor power Input maksimum menjadi: Rotor power developed maksimum menjadi: Torsi maksimum menjadi:

91
Contoh soal A three-phase 220-V 60-Hz six-pole 10-hp induction motor has following circuit parameters on a per phase basis referrred to the stator: RS = W R’R = 0.147W XS = W X’R = 0.224W X’M = 12.6W Assuming a Y-connected stator winding. The rotational losses and core loss combined amount to 262 W and may be assumed constant. For slip of 2.8 % calculate of: the starting torque of the motor the maximum torque of the motor

92
SOLUTION Arus starting : RPI starting :

93
SOLUTION Kecepatan sudut sinkron : Torsi starting :

94
SOLUTION Slip saat torsi maksimum :
Kecepatan putar saat torsi maksimum : RPI saat torsi maksimum :

95
SOLUTION RPD saat torsi maksimum : Torsi maksimum :

96
MOTOR ROTOR BELITAN Perbedaan mendasar dari Motor rotor belit dengan motor sangkar bajing adalah terdapat pada konstruksi rotor Rotor sangkar bajing mempunyai: Tahanan rotor tetap Arus starting tinggi Torsi starting rendah Rotor belit Memungkinkan tahanan luar dihubungkan ke tahanan rotor melalui slip ring yang terhubung ke sikat. Arus starting rendah Torsi starting tinggi Power faktor baik

97
BAGIAN-BAGIAN ROTOR BELIT

98
Graph of induction motors showing effect of increasing the ratio of resistance to inductance

99
KLAS ISOLASI MOTOR Class Maximum Allowed Temperature (*) A 105ºC 221ºF
B 130ºC 266ºF F 155ºC 311ºF H 180oC 356oF

100
MOTOR DUTY CYCLE TYPES AS PER IEC STANDARDS

101
MOTOR DUTY CYCLE TYPES AS PER IEC STANDARDS

102
TYPICAL NAME PLATE OF AN AC INDUCTION MOTOR

103
NAME PLATE TERMS AND THEIR MEANINGS
Description Volts Rated terminal supply voltage. Amps Rated full-load supply current. H.P. Rated motor output. R.P.M Rated full-load speed of the motor. Hertz Rated supply frequency. Frame External physical dimension of the motor based on the NEMA standards. Duty Motor load condition, whether it is continuos load, short time, periodic, etc.

104
NAME PLATE TERMS AND THEIR MEANINGS
Description Date Date of manufacturing. Class Insulation Insulation class used for the motor construction. This specifies max. limit of the motor winding temperature. NEMA Design This specifies to which NEMA design class the motor belongs to. Service Factor Factor by which the motor can be overloaded beyond the full load.

105
NAME PLATE TERMS AND THEIR MEANINGS
Description NEMA Nom. Efficiency Motor operating efficiency at full load. PH Specifies number of stator phases of the motor. Pole Specifies number of poles of the motor. Specifies the motor safety standard. Y Specifies whether the motor windings are start (Y) connected or delta (∆) connected.
 connected or delta (∆) connected.")
106
MENENTUKAN PARAMETER RANGKAIAN EKUIVALEN MOTOR INDUKSI TIGA PHASE
Melakukan kegiatan pengujian untuk mendapatkan parameter rangkaian ekuivalent motor induksi Menggambar karakteristik motor induksi (torsi terhadap slip) Menguji kebenaran data-data yang ada pada name plate
 Menguji kebenaran data-data yang ada pada name plate.")
107
RANGKAIAN EKUIVALENT MOTOR INDUKSI

108
TEST MOTOR No load test Blocked rotor test DC test

109
No Load Test Tujuan menentukan rugi inti + rugi rotasional
menentukan parameter Xm

110
Blocked rotor test Tujuan menentukan parameter Re dan Xe

111
DC test Tujuan untuk hubungan Y Resistansi ekuivalen rotor
Menentukan parameter RS dan R’R untuk hubungan Y Resistansi ekuivalen rotor

112
DC test untuk hubungan delta Resistansi ekuivalen rotor
untuk 60Hz Rac=1,4Rdc untuk 50Hz Rac=1,3Rdc

113
Contoh Name plate Three Phase Induction Motor P = 0,75 KW = 1 HP V = 380/220 V f = 50 Hz nr = 1380 rpm I = 2/3,45 A

114
P = 120 W V = 380 V I = 1,3 A Blocked rotor test : P = 260 W V = 120 V
Data yang diperoleh : No load test : P = 120 W V = 380 V I = 1,3 A Blocked rotor test : P = 260 W V = 120 V I = 2 A DC test : V = 48 V

115
PERHITUNGAN No load test

116
PERHITUNGAN DC test

117
PERHITUNGAN Blocked rotor test

118
Rangkaian Ekuivalen MI

119
Slip motor: Jika nr = rpm, maka ns yang mungkin pada frekuensi 50 Hz adalah 1500 rpm shg:

120
Arus I’R Arus IS

121
Rotor Power Input (RPI)
Rotor Power Developed (RPD)
")
122
Daya Output Daya Losses

123
Effisiensi dan daya dalam Hp

124
Rangkuman Hasil Test Xm = 168,76 ohm P rot+inti = 42,5 W
No load test Xm = 168,76 ohm P rot+inti = 42,5 W Blocked rotor test Re = 21,67 ohm Ze = 34,6 ohm Xe = 26,97 ohm R’r = 6,07 ohm DC test Rdc = 11,75 ohm Rac = 15,27 ohm Slip= 0,08

125
Rangkuman Hasil Test I’R = 2,3 A RPI = 1185,2 W RPD = 1032,1 W
Pout = 989,6 W Effisiensi = 66,12 % Daya output dalam Hp = 1,33 Hp

126
SOAL 1 Diketahui motor induksi tiga phasa, P=4, V=230 V, f=60 Hz, nm=1725 rpm Tentukan : slip per-unit dan frekuwensi rotor pada rated speed

127
PENYELESAIAN Kecepatan sinkron dari motor adalah : Slip per-unit :
Maka frekwensi rotor :

128
SOAL 2 Diketahui motor induksi tiga phasa 10 HP, P=4, V=440 V, f=60 Hz, nm=1725 rpm Rugi tembaga stator = 212 W; rotational loss=340 W Tentukan : a. Power developed b. Daya celah udara c. Rugi tembaga rotor d. Total daya input e. Efisiensi motor

129
PENYELESAIAN Kecepatan sinkron dari motor adalah : Slip per-unit :
Daya output rotor :

130
c. Rugi tembaga rotor : Pcu2 = sPAG = x = W Rugi tembaga stator : Pcu1= 212 W (diberikan) d. Daya input : e. Efisiensi :

131
SOAL 3 Diketahui motor induksi tiga phasa 2 HP, P=4, V=120 V, f=60 Hz, nm=1620 rpm Impedansi stator=0.02+j0.06 Ω; rotational loss=160 W Tentukan : arus rotor

132
PENYELESAIAN Daya output adalah : Kecepatan sinkron : Slip per-unit :

133
Daya yang dikonversikan :
Daya celah udara : Rugi tembaga rotor : Pcu2 = sPAG = 0.1x1835,56 = 183,556 W

134
Arus rotor :

135
SOAL 4 Diketahui motor induksi tiga phasa hubungan Y, P=6, V=230 V, f=60 Hz, Parameter :r1=0.5Ω; r2=0.25Ω; x1=0.75Ω; x2=0.5Ω; Xm=100Ω; Rc=500Ω; Impedansi stator = 0.02+j0.06 Ω; rotational loss=160 W Tentukan : Arus stator, arus rotor, arus magnetisasi, daya input, rugi tembaga stator, rugi tembaga rotor, daya output, torsi pada shaft dan efisiensi η saat rated slip=2.5 %

136
PENYELESAIAN Kecepatan sinkron : Kecepatan sudut sinkron :

137
Rangkaian Ekivalen Motor

138
Berdasarkan rangkaian pada gambar, maka Tegangan per-phasa adalah :
Impedansi rotor efektif berdasar pada stator adalah :

139
Impedansi celah udara :
Maka :

140
Impedansi total : Arus stator : Faktor daya :

141
Daya input : Rugi tembaga stator : Tegangan Input :

142
Arus Inti : Arus magnetasi : Arus eksitasi :

143
Arus rotor : Rugi inti : Daya celah udara :

144
Rugi tembaga rotor : Daya konversi : Daya output :

145
Efisiensi : Torsi poros/shaft :

146
SOAL 5 Diketahui motor induksi tiga phasa hubungan Y.
Parameter : r1=10 Ω; x1=25 Ω; r2=3Ω; x2=25 Ω, Xm=75 Ω Tentukan : breakdown slip dan torsi maksimum pada motor.

147
PENYELESAIAN Kecepatan sinkron : Kecepatan sudut sinkron :

148
Rangkaian Ekivalen Motor

149
Berdasarkan rangkaian pada gambar, maka Tegangan per-phasa adalah :
Tegangan thevenin:

150
Impedansi thevenin : Maka :

151
Breakdown (optimum) slip :
Torsi Maksimum:

152
SOAL 6 Diketahui motor induksi tiga-fasa, 100 HP,
V=440 V, P=8, f=60 Hz, impedansi rotor= j 0.08 perfasa. Tentukan : Kecepatan saat torsi motor maksimum dan resistansi eksternal yang harus ditambahkan secara seri pada rotor jika torsi start dari motor 80 % dari nilai maksimum

153
PENYELESAIAN Daya output : Kecepatan sinkron :

154
Impedansi rotor : Slip maksimum dapat diperoleh dengan :

155
Kecepatan motor saat torsi maksimum adalah :
Torsi motor maksimum diperoleh :

156
Penambahan tahanan luar (r) saat motor jalan pada torsi start 80% dari nilai maksimum adalah :
 saat motor jalan pada torsi start 80% dari nilai maksimum adalah :")
157
Nilai tahanan luar yang dibutuhkan adalah :

158
Pengaturan Putaran Pengaturan Putaran dapat dilakukan dengan : -. Mengubah jumlah kutub -. Mengubah nilai frekuensi -. Mengatur tegangan jala-jala -. Mengatur tahanan luar

159
Pengaturan Putaran

160
Menjalankan Motor Induksi Tiga Phasa
Motor induksi tiga phasa dengan daya yang besar tidak dapat dijalankan dengan cara dihubungkan langsung ke sumber jala-jala. Hal ini disebabkan karena, akan menyerap arus yang sangat besar yaitu mencapai 6 -8 kali arus nominalnya. Hal ini disebabkan karena pada saat start besarnya slip pada motor induksi adalah sama dengan 1 (satu), sehingga di saat Slip = 1, tahanan rotor kecil. Arus menjadi besar dan akan merusak motor itu sendiri atau terganggunya sistem instalasi tegangan akan Drop. Di mana Drop tegangan ini mengganggu kerja dari relay, kontaktor, nyala lampu, maupun peralatan elektronik dan computer yang ada disekitarnya.
, sehingga di saat Slip = 1, tahanan rotor kecil. Arus menjadi besar dan akan merusak motor itu sendiri atau terganggunya sistem instalasi tegangan akan Drop. Di mana Drop tegangan ini mengganggu kerja dari relay, kontaktor, nyala lampu, maupun peralatan elektronik dan computer yang ada disekitarnya.")
161
Ada beberapa cara untuk mengurangi besarnya arus start antara lain adalah :
1. Primary resistor control 2. Transformer control 3. Wey-Delta control 4. Part-winding start control 5. Electronic control

162
STARTING STAR/DELTA Gambar. Hubungan Bintang Gambar. Hubungan Segitiga
U V W X Y Z Z X Y Gambar. Hubungan Bintang Gambar. Hubungan Segitiga Kumparan stator saat pengawalan dalam hubungan bintang (Ү), setelah motor mencapai putaran nominal hubungan berubah menjadi delta (∆). Sehingga hubungan tegangan dan arusnya dapat dilihat sebagai berikut : Tegangan , pada hubungan bintang (Y) tegangan pada kumparan mendapat tegangan sebesar 1/ dari tegangan jala-jala , untuk hubungan delta (∆).tegangan pada kumparan mendapat tegangan sama dengan tegangan jala-jala.
, setelah motor mencapai putaran nominal hubungan berubah menjadi delta (∆). Sehingga hubungan tegangan dan arusnya dapat dilihat sebagai berikut : Tegangan , pada hubungan bintang (Y) tegangan pada kumparan mendapat tegangan sebesar 1/ dari tegangan jala-jala , untuk hubungan delta (∆).tegangan pada kumparan mendapat tegangan sama dengan tegangan jala-jala.")
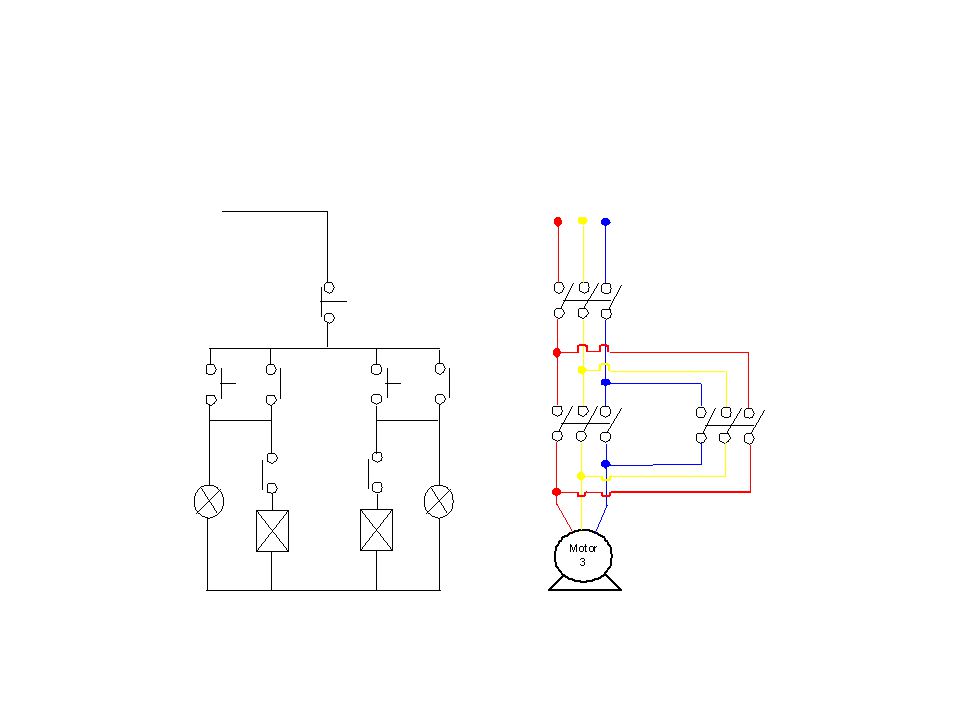
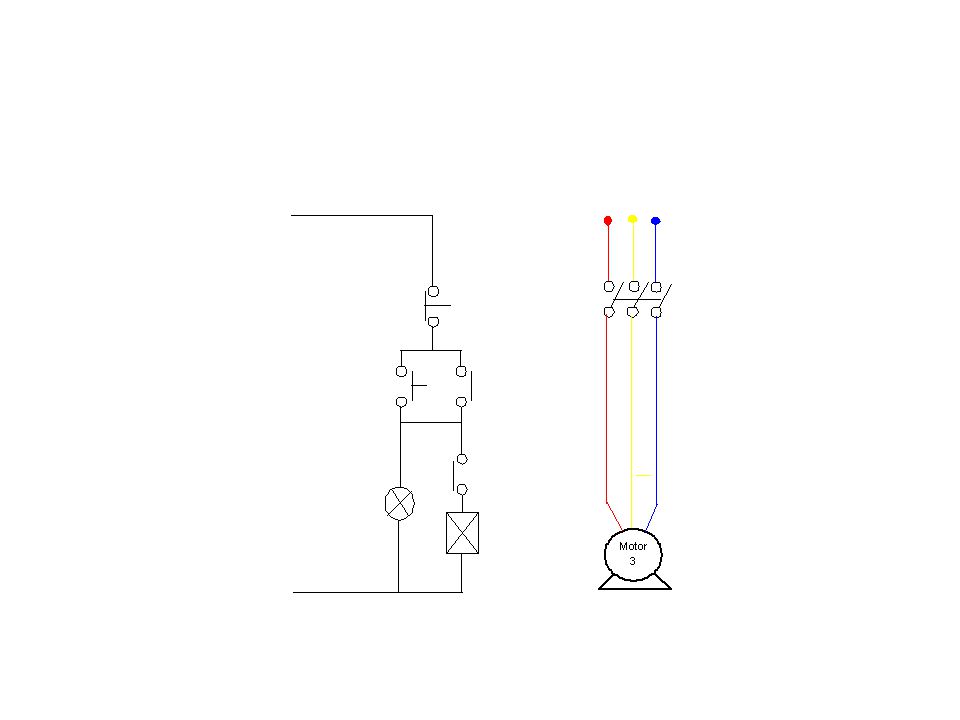
163
STARTING STAR/DELTA

Presentasi serupa