Upload presentasi
1
Pengolahan Citra (TIF05)
5 – Filtering disusun oleh Teady Matius

2
Filtering Filtering meloloskan (menerima) komponen dengan frekwensi tertentu dan menghilangkan (menolak) komponen dengan frekwensi yang lain Diperlukan sebuah filter g(x,y) berupa matriks berukuran n x n, (umumnya 3x3) yang tiap-tiap sel-sel nya berisi bobot filtering. Ada yang menyebutnya sebagai filter, mask, kernel, ataupun window Setiap titik (x,y) pada citra f(x,y) di filter dengan filter g(x,y) menghasilkan h(x,y) h(x,y) hasil filtering pada titik (x,y)
 berupa matriks berukuran n x n, (umumnya 3x3) yang tiap-tiap sel-sel nya berisi bobot filtering. Ada yang menyebutnya sebagai filter, mask, kernel, ataupun window. Setiap titik (x,y) pada citra f(x,y) di filter dengan filter g(x,y) menghasilkan h(x,y) h(x,y) hasil filtering pada titik (x,y)")
3
Area Lokal - Titik yang diproses dan tetangganya
(x-1, y-1) (x,y-1) (x+1,y-1) (x-1,y) (x,y) (x+1,y) (x-1,y+1) (x,y+1) (x+1,y+1)
 (x,y-1) (x+1,y-1) (x-1,y) (x,y) (x+1,y) (x-1,y+1) (x,y+1) (x+1,y+1)")
4
Mekanisme Filtering Spasial
Letakkan filter g(x,y) mulai dari titik (x-1, y-1) dari titik (x,y) yang akan dilakukan filtering. Hitung h(x,y) berdasarkan sel-sel pada titik tersebut dan titik-titik tetangganya dengan bobot pada sel-sel matriks filter g(x,y) sesuai dengan posisi sel-selnya. Secara umum persamaannya adalah: h(x,y) = wo.f(x,y) + w1.f(x-1,y-1) + w2.f(x,y-1) + w3.f(x+1,y-1) + w4.f(x+1,y) + w5.f(x+1,y+1) + w6.f(x,y+1) + w7.f(x-1,y+1) + w8.f(x-1,y) Filtering dilakukan mulai dari sudut atas matriks sampai sudut bawah matriks
 mulai dari titik (x-1, y-1) dari titik (x,y) yang akan dilakukan filtering. Hitung h(x,y) berdasarkan sel-sel pada titik tersebut dan titik-titik tetangganya dengan bobot pada sel-sel matriks filter g(x,y) sesuai dengan posisi sel-selnya. Secara umum persamaannya adalah: h(x,y) = wo.f(x,y) + w1.f(x-1,y-1) + w2.f(x,y-1) + w3.f(x+1,y-1) + w4.f(x+1,y) + w5.f(x+1,y+1) + w6.f(x,y+1) + w7.f(x-1,y+1) + w8.f(x-1,y) Filtering dilakukan mulai dari sudut atas matriks sampai sudut bawah matriks.")
5
Jenis-jenis Filtering
Filter Spasial Linier Bekerja dengan cara korelasi atau konvolusi Contoh: filter rata-rata, filter gaussian Memerlukan matriks mask/kernel Filter Spasial Non Linier (order-statistics fitlers) Respon berdasarkan pengurutan intensitas piksel-piksel tetangga Contoh: filter maksimum, filter minimum, filter rata-rata, filter median,
 Respon berdasarkan pengurutan intensitas piksel-piksel tetangga. Contoh: filter maksimum, filter minimum, filter rata-rata, filter median,")
6
Filter Spasial Non Linier
Filtering dengan meloloskan suatu nilai yang didapatkan dari proses non linear. Beberapa contoh yang didapat dari operasi statistik Mean Filtering mengganti nilai sel bitmap dengan nilai rata-rata dari area lokal. Minimum Filtering mengganti nilai sel bitmap dengan nilai terkecil dari area lokal. Maximum Filtering mengganti nilai sel bitmap dengan nilai terbesar dari area lokal. Mid-Point Filtering mengganti nilai sel bitmap dengan nilai tengah diantara nilai terkecil dan terbesar dari area lokal. Median Filtering mengganti nilai sel bitmap dengan nilai median dari area lokal yang sudah disort. Merupakan Operasi tingkat lokal

7
Contoh Filter Spasial NonLinier minimum filtering

8
Contoh Filter Spasial NonLinier maximum filtering

9
Contoh Filter Spasial NonLinier mid-point filtering

10
Contoh Filter Spasial NonLinier median filtering

11
Filtering Spasial Linear
Filtering yang dilakukan dengan operasi linear berupa konvolusi atau korelasi antara Area lokal suatu sel bitmap dengan kernel Merupakan operasi tingkat lokal

12
Kernel / Mask / Penapis / Window
Berupa matriks 2x2, 3x3, 4x4, 5x5, dsb. Mempunyai sel pusat, dimana sel bitmap yang akan diproses terdapat pada sel tersebut Contoh pada matriks 3x3 pusatnya adalah sel (2,2); pada matriks 5x5 pusatnya adalah sel (3,3) Untuk matriks dengan ordo genap pemilihan sel pusat dilakukan dengan melakukan pembulatan ke bawah dari n/2 untuk kolom dan m/2 untuk baris Contoh pada matriks 2x2 sebagai pusat adalah sel (1,1), pada matriks 4x4, pusatnya adalah sel (6,2).
; pada matriks 5x5 pusatnya adalah sel (3,3) Untuk matriks dengan ordo genap pemilihan sel pusat dilakukan dengan melakukan pembulatan ke bawah dari n/2 untuk kolom dan m/2 untuk baris. Contoh pada matriks 2x2 sebagai pusat adalah sel (1,1), pada matriks 4x4, pusatnya adalah sel (6,2).")
13
Matriks Filter g(x,y) 3x3 w1 w2 w3 w8 w0 w4 w7 w6 w5
 3x3 w1 w2 w3 w8 w0 w4 w7 w6 w5")
14
Korelasi dan Konvolusi
Perkalian antara dua fungsi f(x,y) dan g(x,y) Konvolusi: Dimana fungsi g(x,y) konvolusi berkebalikan dengan g(x,y) pada korelasi Dipergunakan untuk melakukan pemfilteran spasial linier dengan melakukan korelasi ataupun konvolusi kedua fungsi f(x,y) dan g(x,y)
 dan g(x,y) Konvolusi: Dimana fungsi g(x,y) konvolusi berkebalikan dengan g(x,y) pada korelasi. Dipergunakan untuk melakukan pemfilteran spasial linier dengan melakukan korelasi ataupun konvolusi kedua fungsi f(x,y) dan g(x,y)")
15
Persamaan Korelasi x, y, k, l variabel bebas yang memiliki nilai diskrit, dimana x dan y adalah koordinat piksel yang sedang diolah, k dan l adalah koordinat dari piksel dalam suatu area lokal yang memperngaruhi hasil h(x,y) h(x,y) hasil pada koordinat x,y f(x,y) fungsi f yang mengolah piksel x,y berikut tetangganya g(x,y) fungsi filter untuk mengolah piksel x,y M, N batas titik tetangga yang mempengaruhi titik yang sedang diolah
 h(x,y) hasil pada koordinat x,y. f(x,y) fungsi f yang mengolah piksel x,y berikut tetangganya. g(x,y) fungsi filter untuk mengolah piksel x,y. M, N batas titik tetangga yang mempengaruhi titik yang sedang diolah.")
16
Contoh Kernel Korelasi antara Bitmap dan kernel

17
Contoh Implementasi Korelasi
. for y = 1 to tinggiBitmap do for x = 1 to lebarBitmap do hasilBitmap[x,y] = korelasi(x, y, m, n) x, y koordinat bitmap yang sedang diproses m lebar kernel n tinggi kernel
 x, y koordinat bitmap yang sedang diproses. m lebar kernel. n tinggi kernel.")
18
Contoh 1.a Algoritma Function Korelasi (untuk kernel 3 X 3)
function korelasi(x, y):integer; begin hasil = 0; for l=1 to 3 do for k=1 to 3 do hasil = hasil + g[k,l] * f[x+(k-3+1),y+(l-3+1)]; return hasil; end; g kernel f bitmap
:integer; begin. hasil = 0; for l=1 to 3 do. for k=1 to 3 do. hasil = hasil + g[k,l] * f[x+(k-3+1),y+(l-3+1)]; return hasil; end; g kernel. f bitmap.")
19
Contoh 1.b Algoritma Function Korelasi (untuk kernel m X n)
function korelasi(x, y, m, n):integer; begin hasil = 0; for l=1 to n do for k=1 to m do hasil = hasil + g[k,l] * f[x+Ht+(k-m+Ht),y+Vt+(l-n+Vt)]; return hasil; end; g kernel f bitmap Ht Round(m/2); Vt Round(n/2)
:integer; begin. hasil = 0; for l=1 to n do. for k=1 to m do. hasil = hasil + g[k,l] * f[x+Ht+(k-m+Ht),y+Vt+(l-n+Vt)]; return hasil; end; g kernel. f bitmap. Ht Round(m/2); Vt Round(n/2)")
20
Contoh 2 Algoritma Function Korelasi
function korelasi(x, y, m, n):integer; begin hasil = 0; for l=-(round(n/2)) to round(n/2) do for k=-(round(m/2)) to round(m/2) do hasil = hasil + g[k,l] * f[x+k,y+l]; return hasil; end; g kernel f bitmap
:integer; begin. hasil = 0; for l=-(round(n/2)) to round(n/2) do. for k=-(round(m/2)) to round(m/2) do. hasil = hasil + g[k,l] * f[x+k,y+l]; return hasil; end; g kernel. f bitmap.")
21
Contoh Kernel Konvolusi antara Bitmap dan kernel

22
Contoh Implementasi Konvolusi
. for y = 1 to tinggi do for x = 1 to lebar do hasilBitmap[x,y] = konvolusi(x, y, m, n) x, y koordinat bitmap yang sedang diproses m lebar kernel n tinggi kernel
 x, y koordinat bitmap yang sedang diproses. m lebar kernel. n tinggi kernel.")
23
Contoh 1.a Algoritma Function Konvolusi (untuk kernel 3 X 3)
function konvolusi(x, y):integer; begin hasil = 0; for l=1 to 3 do for k=1 to 3 do hasil = hasil + g[k,l] * f[x-(k-3+1),y-(l-3+1)]; return hasil; end; g kernel f bitmap
:integer; begin. hasil = 0; for l=1 to 3 do. for k=1 to 3 do. hasil = hasil + g[k,l] * f[x-(k-3+1),y-(l-3+1)]; return hasil; end; g kernel. f bitmap.")
24
Contoh 1.b Algoritma Function Konvolusi (untuk kernel m X n)
function konvolusi(x, y, m, n):integer; begin hasil = 0; for l=1 to n do for k=1 to m do hasil = hasil + g[k,l] * f[x+Ht-(k-m+Ht),y+Vt-(l-n+Vt)]; return hasil; end; g kernel f bitmap Ht Round(m/2); Vt Round(n/2)
:integer; begin. hasil = 0; for l=1 to n do. for k=1 to m do. hasil = hasil + g[k,l] * f[x+Ht-(k-m+Ht),y+Vt-(l-n+Vt)]; return hasil; end; g kernel. f bitmap. Ht Round(m/2); Vt Round(n/2)")
25
Contoh 2 Algoritma Function Konvolusi
function konvolusi(x, y, m, n):integer; begin hasil = 0; for l=-(round(n/2)) to round(n/2) do for k=-(round(m/2)) to round(m/2) do hasil = hasil + g[k,l] * f[x-k,y-l]; return hasil; end; g kernel f bitmap
:integer; begin. hasil = 0; for l=-(round(n/2)) to round(n/2) do. for k=-(round(m/2)) to round(m/2) do. hasil = hasil + g[k,l] * f[x-k,y-l]; return hasil; end; g kernel. f bitmap.")
26
Beberapa pendapat mengenai piksel tepi
Hanya dilakukan pada semua piksel yang berjarak tidak kurang dari (n-1)/2 piksel dari tepi citra Jumlah piksel tetangga yang dilibatkan dalam perhitungan tidak harus lengkap Menambah baris dan kolom berisi 0 atau konstanta tertentu pada citra Mereplikasi baris dan kolom
/2 piksel dari tepi citra. Jumlah piksel tetangga yang dilibatkan dalam perhitungan tidak harus lengkap. Menambah baris dan kolom berisi 0 atau konstanta tertentu pada citra. Mereplikasi baris dan kolom.")
27
Filter Rata-rata (Filter Spasial Linier)
Sebagai penghalusan (smoothing) Nilai intensitas setiap pixel diganti dengan rata-rata nilai piksel ybs dengan tetangganya Mengaburkan (blurring) citra untuk mereduksi noise Blurring akan menghilangkan detail kecil dari suatu citra sebelum dilakukan ekstraksi objek dan dapat Menghubungkan celah kecil yang memisahkan garis atau kurva Filter rata-rata pada Filter Linier sama dengan Filter rata-rata pada Filter Non Linier
 Nilai intensitas setiap pixel diganti dengan rata-rata nilai piksel ybs dengan tetangganya. Mengaburkan (blurring) citra untuk mereduksi noise. Blurring akan menghilangkan detail kecil dari suatu citra sebelum dilakukan ekstraksi objek dan dapat Menghubungkan celah kecil yang memisahkan garis atau kurva. Filter rata-rata pada Filter Linier sama dengan Filter rata-rata pada Filter Non Linier.")
28
Contoh hasil filtering dengan filter rata-rata

29
Filter High Pass (Filter Spasial Linier)
Menahan nilai intensitas yang tinggi dan mengurangi nilai dengan intensitas yang rendah sehingga menghasilkan efek sharpenning Kernel di rancang untuk menambah kecerahan suatu piksel berdasarkan dari nilai-nilai tetangganya. Kernel mempunyai perbedaan sel pusat dengan tetangga-tetangganya yang sangat besar, dengan sel pusat adalah yang mempunyai nilai tertingginya. Kernel FHP biasanya berupa sebuah nilai positif di pusat kernel, dan dikelilingi dengan nilai negatif pada tetangga-tetangganya. (ref: idlastro.gsfc.nasa.gov/idl_html_help/Filtering_an_Imagea.html)
")
30
Beberapa Contoh kernel High Pass Filtering

31
Contoh High Filtering dengan total koefesien = 1

32
Contoh High Filtering dengan total koefesien = 0

33
Low Pass Filtering (Filter Spasial Linier)
Menghasilkan efek blurfing atau smoothing Filter rata-rata adalah sederhana dari low pass filtering. Filter Gaussian merupakan salah satu varian dari Low Pass Filtering Contoh lain dari Low Pass Filter yang menghasilkan efek smoothing yang lebih halus dengan efek blurring yang lebih sedikit adalah:

34
Contoh Low Pass Filtering

35
Filter Gaussian (Filter Spasial Linier)
Nilai intensitas setiap piksel diganti dengan rata-rata dari nilai pembobotan untuk setiap piksel-piksel tetangganya dan piksel itu sendiri. Filter harus dirancang terlebih dahulu, dengan berdasarkan pada ordo matriks dan nilai standart deviasi ². Dengan efek kurva yang dihasilkan, maka akan didapat efek smoothing pada citra yang diproses Semakin besar nilai standart deviasi ², maka semakin halus pula efek yang dihasilkan dari pemfilteran menggunakan Filter yang dihasilkan

36
Fungsi Gaussian

37
Persamaan-persamaan pada Gaussian
Fungsi zero mean Gaussian dua variabel g(x,y)= ℯ-(x²+y²)/(2. ²) Untuk mengisi elemen-elemen pada matriks kernel gaussian Distribusi diskrit gaussian g(x,y) =c. ℯ-(x²+y²)/(2. ²) nilai c yang dihasilkan dikalikan dengan masing-masing bobot nilai, sehingga menghasilkan matriks filter gaussian. ℯ Adalah konstanta euler dengan nilai
= ℯ-(x²+y²)/(2. ²) Untuk mengisi elemen-elemen pada matriks kernel gaussian. Distribusi diskrit gaussian. g(x,y) =c. ℯ-(x²+y²)/(2. ²) nilai c yang dihasilkan dikalikan dengan masing-masing bobot nilai, sehingga menghasilkan matriks filter gaussian. ℯ Adalah konstanta euler dengan nilai")
38
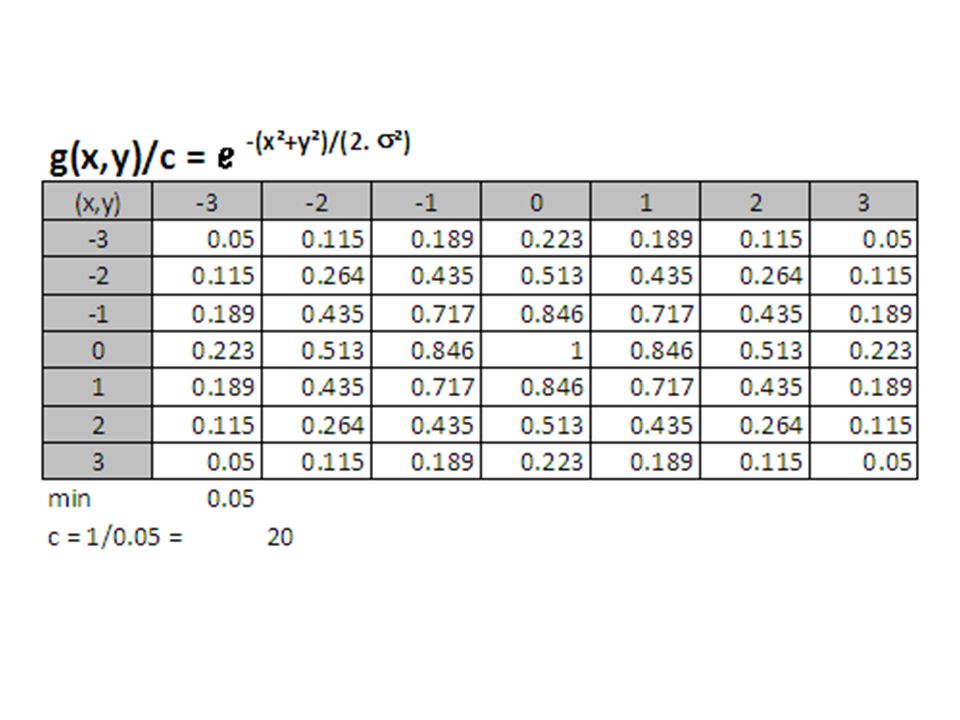
Merancang Gaussian Filter
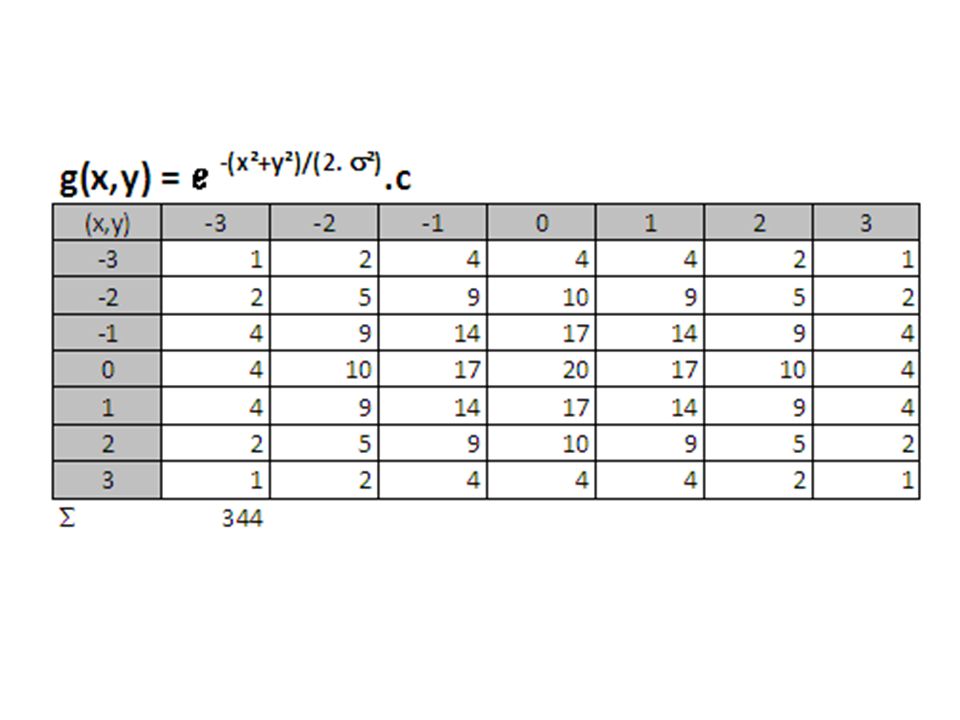
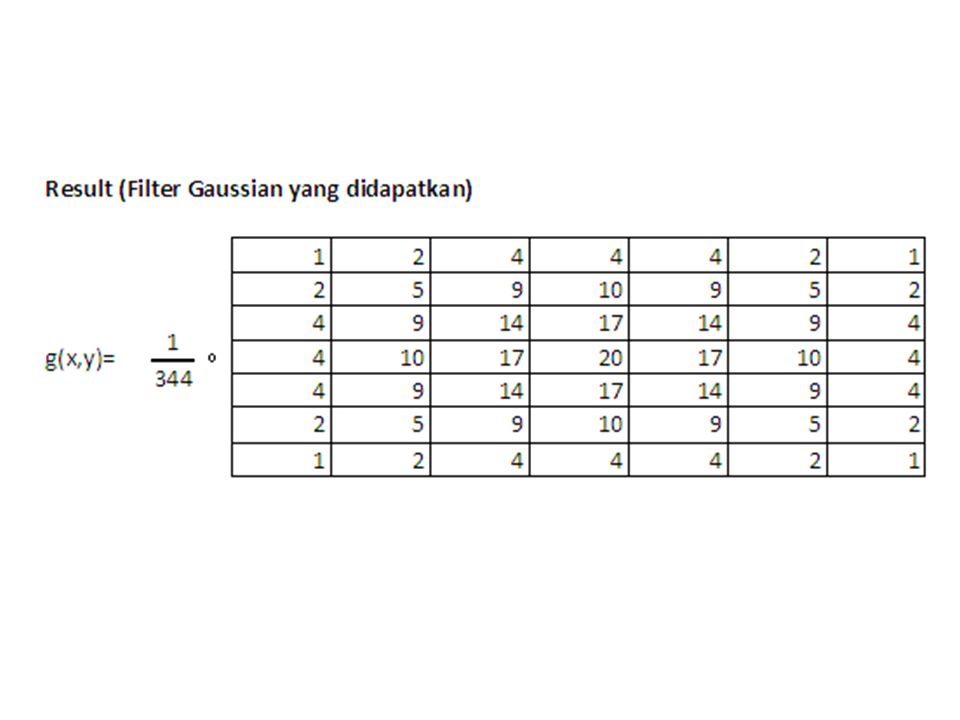
Cari g(x,y)/c= ℯ-(x²+y²)/(2. ²), tempatkan pada sebuah matriks m x n Cari nilai terkecil dari matriks m x n yang didapat Cari koefesien c dengan cara membagi 1 dengan nilai terkecil g(x,y) Cari g(x,y) dengan koefesien c yang berhasil didapat Cari jumlah g(x,y) sebagai pembagi Masukkan jumlah g(x,y) sebagai pembagi matriks filter yang berhasil didapat.
/c= ℯ-(x²+y²)/(2. ²), tempatkan pada sebuah matriks m x n. Cari nilai terkecil dari matriks m x n yang didapat. Cari koefesien c dengan cara membagi 1 dengan nilai terkecil g(x,y) Cari g(x,y) dengan koefesien c yang berhasil didapat. Cari jumlah g(x,y) sebagai pembagi. Masukkan jumlah g(x,y) sebagai pembagi matriks filter yang berhasil didapat.")
39
Contoh Merancang Kernel Gaussian
Misalkan akan dicari matriks kernel 7 x 7, dengan diketahui standart deviasi 2 adalah 3. Maka: ℯ = 2=3 2.2= 2.3 = 6

44
Filter Gaussian Citra True-Color 2=1; a. normal b. kernel 3x3 c
Filter Gaussian Citra True-Color 2=1; a.normal b.kernel 3x3 c.kernel 5x5 d. kernel 7x7

45
Filter Gaussian Citra Grayscale 2=1; a. normal b. kernel 3x3 c
Filter Gaussian Citra Grayscale 2=1; a.normal b.kernel 3x3 c.kernel 5x5 d. kernel 7x7

46
Filter Gaussian Citra True-Color 2=3; a. normal b. kernel 3x3 c
Filter Gaussian Citra True-Color 2=3; a.normal b.kernel 3x3 c.kernel 5x5 d. kernel 7x7

47
Filter Gaussian Citra Grayscale 2=3; a. normal b. kernel 3x3 c
Filter Gaussian Citra Grayscale 2=3; a.normal b.kernel 3x3 c.kernel 5x5 d. kernel 7x7

48
Filter Gaussian 2=1; a.normal b.kernel 3x3 c.kernel 5x5 d. kernel 7x7








>")






>")






