Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
PEMANFAATAN ACCELEROMETER PADA TELEPON GENGGAM BERBASIS ANDROID SEBAGAI KENDALI MOBILE ROBOT By: CHRISTOFORUS SURJOPUTRO 08.41020.0003

2
Pemanfaatan accelerometer yang kurang berfariatif

7
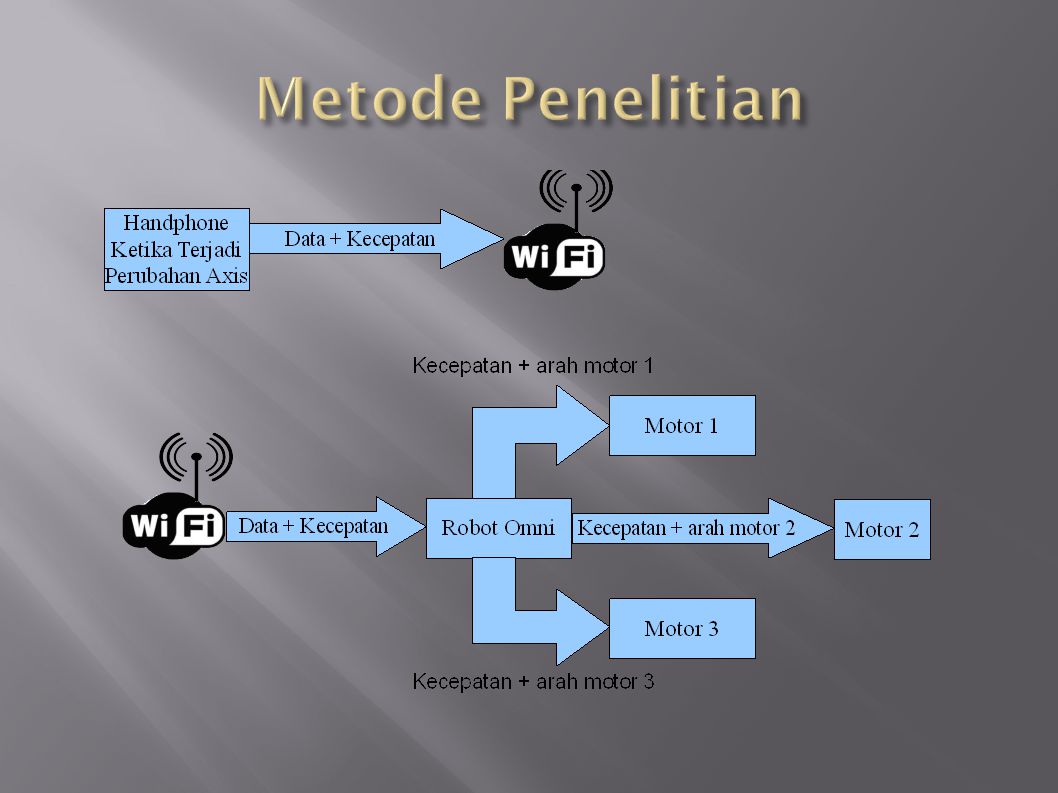
Telepon genggam yang digunakan berbasis android dan optimal pada HP dengan resolusi layar yang tergolong mdpi Robot yang digunakan adalah robotino Telepon genggam digunakan sebagai pengendali arah mobile robot Robot omni yang digunakan menggunakan 3 buah roda

8
Client Server Android Omni-Directional Robots Socket

9
Client-Server adalah arsitektur jaringan yang memisahkan client (biasanya aplikasi yang menggunakan GUI) dengan server. Masing- masing client dapat meminta data atau informasi dari server (Anwar, dkk. 2011)
.")
10
Pada tahun 2005 Google mengakuisisi Android Inc yang pada saat itu dimotori oleh Andy Roubin, Rich Miner, Nick Sears, dan Chris White. Semua aplikasi yang dibuat untuk android akan memiliki akses yang setara dalam mengakses seluruh kemampuan handset, tanpa membedakan apakah itu merupakan aplikasi inti atau aplikasi pihak ketiga. Dalam kata lain dengan platform android ini, programmer atau developer secara penuh akan bisa mengustomisasi perangkat androidnya (Mulyadi, 2010)
.")
11
Keajaiban dari pengendalian omni-directional adalah roda mecanum. Roda ini telah dikembangkan dan dipatenkan oleh perusahaan dari swedia Mecanum AB dengan Bengt Ilon pada tahun 1973 sehingga roda ini sudah ada cukup lama (Braunl, 2006)
.")
12
Soket adalah komponen yang bertugas sebagai penghubung antara satu peralatan dengan peralatan lain. Java menyediakan class socket yang merupakan class dasar untuk bisa melakukan konektivitas jaringan antar komputer. (Purnama, 2005)
.")
16
I am careful not to confuse excellence with perfection. Excellence, I can reach for; perfection is God’s business Michael J. Fox

Presentasi serupa


>")





 Rendy Azhary (08501025) Taufik Rohmat (08501032)>")
>")











