Upload presentasi
1
Penjadwalan Dinamis Sejumlah thread didalam sebuah proses digantikan secara dinamis oleh aplikasi Sistem operasi menyesuaikan beban untuk meningkatkan penggunaannya Menugaskan prosesor idel Yang baru datang memungkinkan ditugaskan ke prosesor yang digunakan oleh job secara lansung menggunakan lebih dari sebuah prosesor Hold request sampai prosesor tersedia New arrival akan diberikan sebuah prosesor sebelum ada yang menjalankan aplikasi

2
Sistem yang Real-Time Ketepatan sistem tidak hanya tergantung pada hasil perhitungan yang logis, tetapi pada waktu yang dihasilkan Task atau proses untuk mengendalikan atau bereaksi akibat sebuah kejadian yang berlansung dari luar Kejadian berlansung secara “real time” dan proses harus dapat menyimpannya

3
Sistem yang Real-Time Pengendali Ekperimen Laboratorium Robotik
Pengendalian Lalulintas Bandara Telekomunikasi Sistem Pengendali dan Komando Militer

4
Karakteristik Sistem Operasi yang Real-Time
Deterministic Operasi-operasi dilakukan pada waktu yang telah ditentukan, predetermined time atau didalam interval predetermined time Yang terkait dengan berapa lama keterlambatan (delay) sistem operasi sebelum mengetahui (acknowledging) terjadi sebuah interupsi
 sistem operasi sebelum mengetahui (acknowledging) terjadi sebuah interupsi.")
5
Karakteristik Sistem Operasi yang Real-Time
Responsiveness Berapa lama setelah mengetahui interupsi akan dilayani oleh sistem operasi Mencakup waktu untuk memulai interupsi Mencakup waktu untuk melaksanakan interupsi

6
Karakteristik Sistem Operasi yang Real-Time
User control User dengan prioritas yang spesifik Paging yang khusus Proses-proses apa yang mesti selalu berada didalam memori utama Algoritma Disk yang digunakan Proses-proses yang terbaik

7
Karakteristik Sistem Operasi yang Real-Time
Reliability Penurunan (degradasi) peforman terjadi merupakan konsekunsi katastropik (catastrophic) Mencoba yang manapun untuk memperbaiki permasalahan atau meminimalkan pengaruhnya sambil melanjutkan untuk beroperasi Yang lebih kritis adalah tugas-tugas yang prioritas lebih tinggi untuk dieksekusi
 peforman terjadi merupakan konsekunsi katastropik (catastrophic) Mencoba yang manapun untuk memperbaiki permasalahan atau meminimalkan pengaruhnya sambil melanjutkan untuk beroperasi. Yang lebih kritis adalah tugas-tugas yang prioritas lebih tinggi untuk dieksekusi.")
8
Perkembangan Sistem Operasi yang Real-Time
Kecepatan dalam kontek fungsi sebagai switch Ukuran yang kecil Kemempuan merespon interupsi eksternal dengan cepat Multitasking dengan komunikasi interprocess seperti semaphore, signal, dan event File-file yang mengakumulasi data dengan cepat

9
Perkembangan Sistem Operasi yang Real-Time
Menggunkan urutan-urutan file yang khusus untuk dapat mengakumulasikan data dengan cepat Penjadwalan preemptive berdasarkan pada prioritas Meminilmalkan interval selama interupsi dinonaktifkan (disabled) Memperlambat (delay) task untuk waktu yang ditentukan Alarm khusus dan time out
 Memperlambat (delay) task untuk waktu yang ditentukan. Alarm khusus dan time out.")
10
Penjadwalan Proses yang Real-Time

11
Penjadwalan Proses yang Real-Time

12
Penjadwalan Proses yang Real-Time

13
Penjadwalan yang Real-Time
Static table-driven Menentukan waktu berjalan ketika task dimulai untuk dieksekusi Static priority-driven preemptive Menggunakan penjadwal traditional priority-driven Dynamic planning-based Dynamic best effort

14
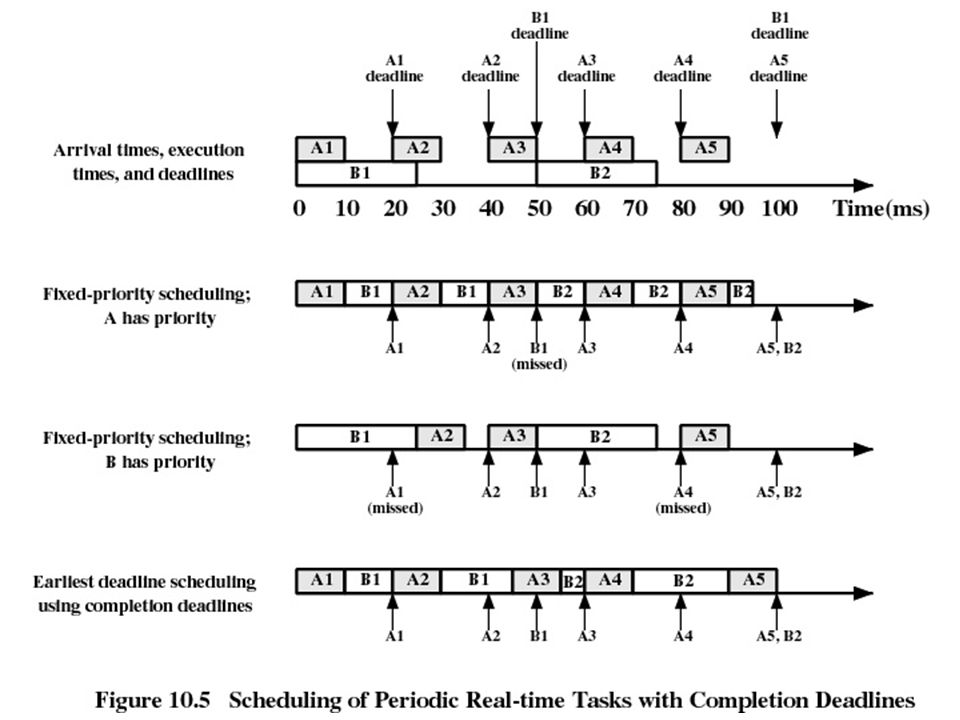
Penjadwalan yang Deadline
Aplikasi yang Real-time tidak terkait dengan kecepatan tetapi dengan penyelesaian task-task Menjadwalkan task-task dengan batas waktu paling awal yang meminimalkan fraksi-fraksi task yang kehilangan batas waktunya

15
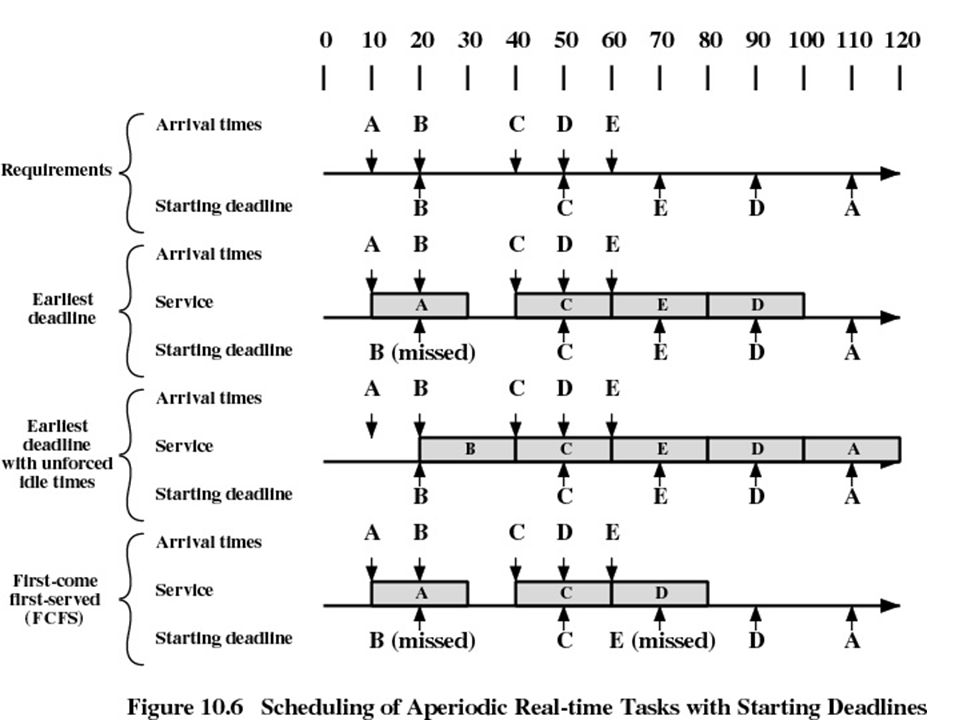
Penjadwalan yang Real-Time
Infrormasi yang digunakan Waktu yang disiapkan (Ready time) Batas waktu yang dimulai (Starting deadline) Batas waktu untuk penyelesaian (Completion deadline) Waktu pemrosesan Kebutuhan akan sumber daya Prioritas Penjadwal Subtask
 Batas waktu yang dimulai (Starting deadline) Batas waktu untuk penyelesaian (Completion deadline) Waktu pemrosesan. Kebutuhan akan sumber daya. Prioritas. Penjadwal Subtask.")
16
Two Tasks

19
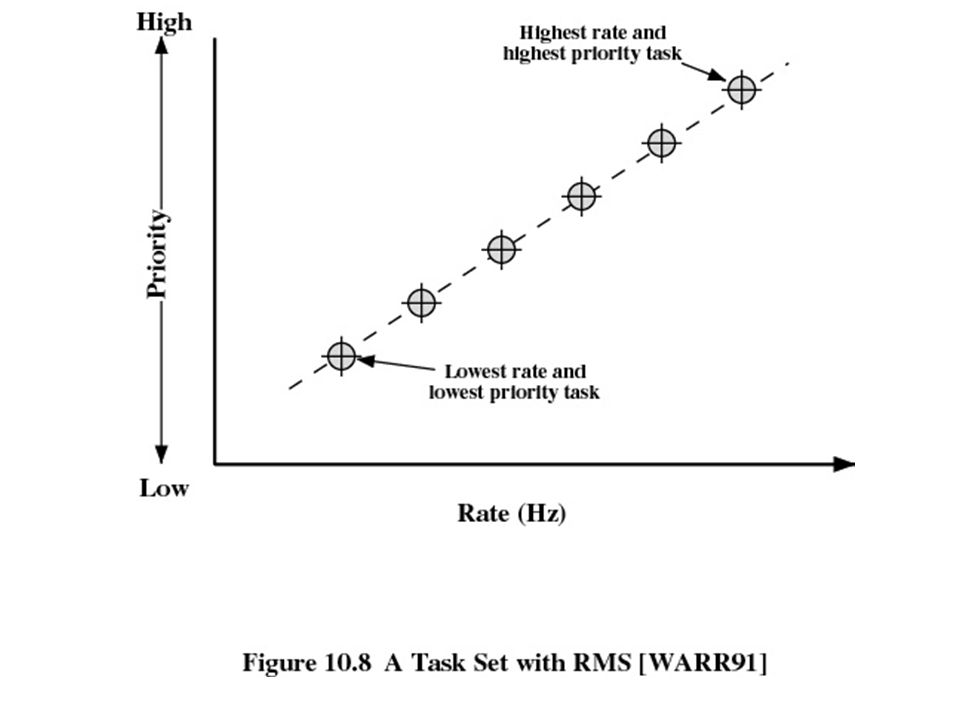
Penjadwalan Rate Monotonic
Memberikan tanda prioritas yang berdasarkan pada periode masing-masing Prioritas tertinggi yang memiliki periode yang terpendek

20
Periodic Task Timing Diagram

22
Penjadwalan Linux Kelas-kelas Penjadwalan
SCHED_FIFO: thread yang First-in-first-out real-time SCHED_RR: thread yang Round-robin real-time SCHED_OTHER: thread yang lainnya adalah yang non-real-time Didalam masing-masing kelas terdapat berbagai prioritas yang mungkin digunakan

24
Penjadwalan UNIX SVR4 Pilihan tertinggi diberikan kepada proses yang Real-Time Tertinggi berikutnya untuk proses kernel-mode Pilihan terendah untuk proses user-mode lainnya

25
SVR4 Dispatch Queues

26
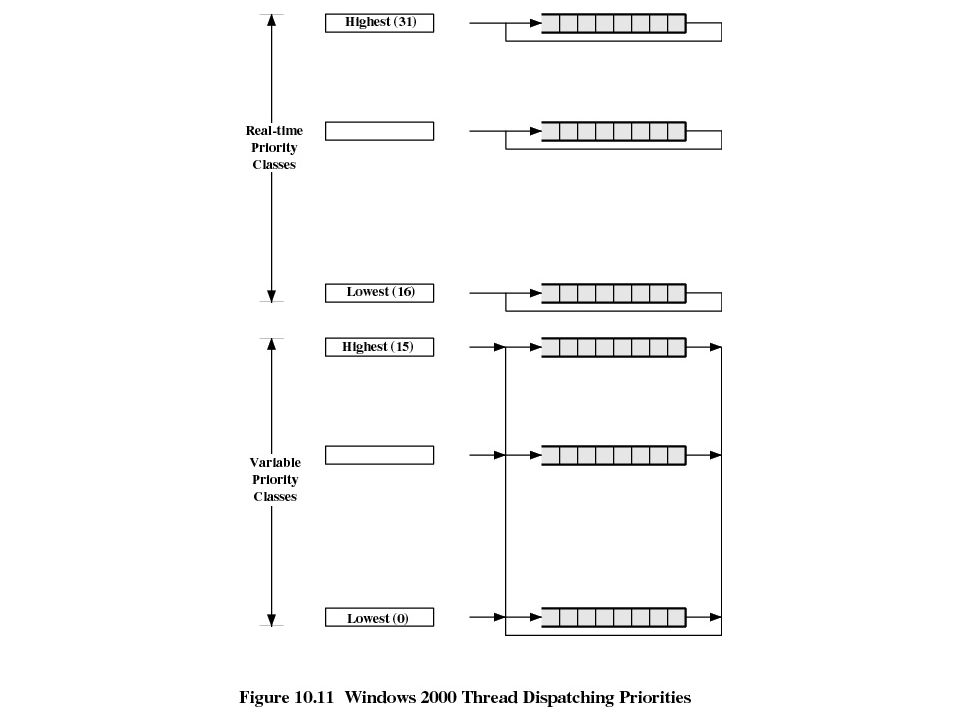
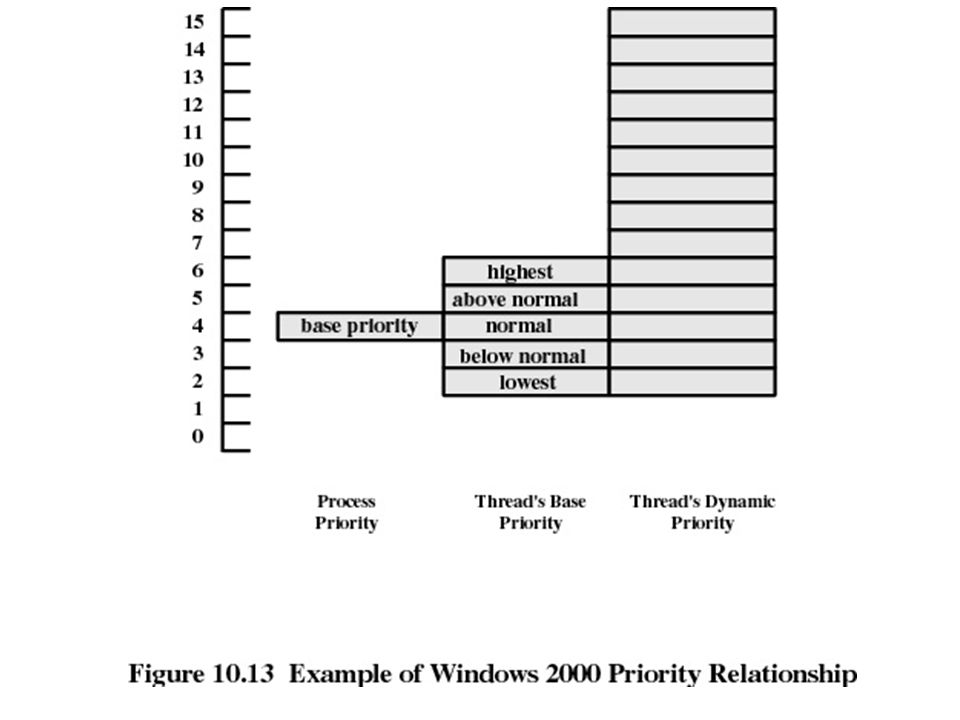
Penjadwalan Windows 2000 Prioritas diorganisi kedalam dua kelompok atau kelas Real-time Variable Pemandu prioritas sebagai penjadwal preemptive







>")
 Pendahuluan Jenis-jenis penjadualan>")








 Minggu 6>")




