Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

2
BASIC FEASIBLE SOLUTION

3
Tujuan PEMBELAJARAN Memahami konsep matriks basis dan inverse
Memahami konsep pembentukan matriks solusi layak dari sebuah permasalahan linear programming

4
OUTLINE BENTUK STANDAR LINEAR PROGRAMMING
DEFINISI DASAR BASIS FEASIBLE SOLUTION BASIC FEASIBLE SOLUTION Tambahan: Mencari Inverse Matriks

5
BENTUK STANDAR LINEAR PROGRAMMING

6
Linear Programming dalam bentuk standar
Memaksimumkan (Meminimumkan) Z = c1x1 + c2x2 + … + cnxn dengan pembatas a11x1 + a12x2 + … + a1nxn = b1 a21x1 + a22x2 + … + a2nxn = b2 . am1x1 + am2x2 + … + amnxn = bm x1≥0, x2≥0,…, xn≥0 b1≥0, b2≥0,…, bm≥0
 Z = c1x1 + c2x2 + … + cnxn. dengan pembatas. a11x1 + a12x2 + … + a1nxn = b1. a21x1 + a22x2 + … + a2nxn = b2. . am1x1 + am2x2 + … + amnxn = bm. x1≥0, x2≥0,…, xn≥0. b1≥0, b2≥0,…, bm≥0.")
7
Ciri-ciri LP dalam bentuk standar
Fungsi tujuan memaksimumkan atau meminimumkan Semua pembatas dinyatakan dalam persamaan Semua variabel keputusan dibatasi sebagai tak negatif Konstanta ruas kanan untuk tiap pembatas adalah tak negatif

8
Ciri-ciri LP dalam bentuk standar
1 Memaksimumkan (Meminimumkan) Z = c1x1 + c2x2 + … + cnxn 2 dengan pembatas a11x1 + a12x2 + … + a1nxn = b1 a21x1 + a22x2 + … + a2nxn = b2 . am1x1 + am2x2 + … + amnxn = bm x1≥0, x2≥0,…, xn≥0 b1≥0, b2≥0,…, bm≥0 3 4
 Z = c1x1 + c2x2 + … + cnxn. 2. dengan pembatas. a11x1 + a12x2 + … + a1nxn = b1. a21x1 + a22x2 + … + a2nxn = b2. . am1x1 + am2x2 + … + amnxn = bm. x1≥0, x2≥0,…, xn≥0. b1≥0, b2≥0,…, bm≥")
9
Notasi matriks-vektor (1)
Max (Min) Z = cx dgn pembatas Ax = b x ≥ 0 A : matriks (m x n) x : vektor kolom (n x 1) b : vektor kolom (m x 1) c : vektor baris (1 x n) b ≥ 0
 Z = cx. dgn pembatas. Ax = b. x ≥ 0. A : matriks (m x n) x : vektor kolom (n x 1) b : vektor kolom (m x 1) c : vektor baris (1 x n) b ≥ 0.")
10
Notasi matriks-vektor (2)
")
11
Reduksi ke bentuk standar
Metode simplex untuk memecahkan masalah LP memerlukan bahwa masalah dinyatakan dalam bentuk standar. Tidak semua masalah LP dalam bentuk standar Pembatas pertidaksamaan (inequality constraint). Variabel yang tak dibatasi tanda (unrestricted in sign of variables)
. Variabel yang tak dibatasi tanda (unrestricted in sign of variables)")
12
Pembatas pertidaksamaan (1)
Karena bentuk standar memerlukan semua pembatas harus dinyatakan dengan dalam persamaan, pembatas pertidaksamaan harus diubah ke persamaan. Ini dilakukan dengan penambahan variabel baru untuk menunjukkan slack antara ruas kiri dan kanan pada tiap pertidaksamaan. Variabel baru tersebut disebut slack variable

13
Pembatas pertidaksamaan (2)
x1 + 4x2 ⇒ x1 + 4x2 + x3 = 10 x3 ≥ 0 2x1 + 5x2 ≥ ⇒ 2x1 + 5x2 – x4 = 18 x4 ≥ 0

14
Menentukan Variabel Slack
Latihan 4.a Menentukan Variabel Slack Susun persamaan berikut menjadi standar dengan menambahkan slack variabel 3x1 + x2 6 2x1 + 2x2 8 x1 ≥ 0 x2 ≥ 0 LATIHAN 4.a Menentukan Variabel Slack Jawablah pertanyaan di atas.(Dengan cara pengerjaan) Jawaban dituliskan pada buku catatan dengan Heading =
 Jawaban dituliskan pada buku catatan dengan Heading =")
15
Variabel yang tak dibatasi tanda (1)
Dalam LP, adakalanya terdapat nilai variabel yang tak dibatasi tanda (positif atau negatif) Karena bentuk standar LP memerlukan semua variabel adalah tak negatif, maka variabel yang tak dibatasi tanda diganti dengan selisih dua variabel tak negatif
 Karena bentuk standar LP memerlukan semua variabel adalah tak negatif, maka variabel yang tak dibatasi tanda diganti dengan selisih dua variabel tak negatif.")
16
Variabel yang tak dibatasi tanda (2)
x1 + x5 = 50 x1 ≥ 0 x5 tak dibatasi tanda/ unrestricted x5 = x6 – x7 x1 + x6 – x7 = 50 x1 ≥ 0, x6 ≥ 0, x7 ≥ 0

17
Menstandarkan Variabel Tak Berbatas Tanda
Latihan 4.b Menstandarkan variabel Tak Berbatas Tanda Susun persamaan berikut menjadi standar dengan menambahkan slack variabel 3x1 + x2 6 2x1 + 2x2 8 x1 ≥ 0 LATIHAN 4.b Menstandarkan Variabel Tak Berbatas Tanda Jawablah pertanyaan di atas.(Dengan cara pengerjaan) Jawaban dituliskan pada buku catatan dengan Heading =
 Jawaban dituliskan pada buku catatan dengan Heading =")
18
DEFINISI DASAR BASIS FEASIBLE SOLUTION

19
Definisi dasar (1) Suatu solusi layak (feasible solution) adalah suatu vektor tak negatif x yang memenuhi persamaan Ax = b. Daerah layak (feasible region), dinyatakan dengan S, adalah himpunan dari semua solusi layak yang mungkin. Secara matematis, S = {x | Ax = b, x ≥ 0} Jika himpunan layak S adalah kosong maka masalah LP dikatakan tak layak (infeasible).
, dinyatakan dengan S, adalah himpunan dari semua solusi layak yang mungkin. Secara matematis, S = {x | Ax = b, x ≥ 0} Jika himpunan layak S adalah kosong maka masalah LP dikatakan tak layak (infeasible).")
20
Definisi dasar (2) Suatu solusi optimal (optimal solution) adalah suatu vektor x* yang layak dan nilai fungsi tujuannya (cx*) lebih besar (untuk kasus maximization) dari semua solusi layak yang lain. Secara matematis, x* adalah optimal x* S dan cx* ≥ cx, x S Nilai optimal (optimal value) dari masalah LP adalah nilai fungsi tujuan yang berkaitan dengan solusi optimal. Jika Z* adalah nilai optimal maka Z* = cx*
 adalah suatu vektor x* yang layak dan nilai fungsi tujuannya (cx*) lebih besar (untuk kasus maximization) dari semua solusi layak yang lain. Secara matematis, x* adalah optimal x* S dan cx* ≥ cx, x S. Nilai optimal (optimal value) dari masalah LP adalah nilai fungsi tujuan yang berkaitan dengan solusi optimal. Jika Z* adalah nilai optimal maka Z* = cx*")
21
Definisi dasar (3) Jika suatu LP mempunyai lebih dari satu solusi optimal maka LP disebut mempunyai solusi optimal alternatif (alternate optimal solution). Solusi optimal dari masalah LP dikatakan unik (unique optimum) jika hanya terdapat tepat satu solusi optimal. Jika suatu masalah LP tidak mempunyai optimum tertentu (finite optimum), yaitu max Z +, maka LP dikatakan mempunyai solusi yang tak terbatas (unbounded solution).
. Solusi optimal dari masalah LP dikatakan unik (unique optimum) jika hanya terdapat tepat satu solusi optimal. Jika suatu masalah LP tidak mempunyai optimum tertentu (finite optimum), yaitu max Z +, maka LP dikatakan mempunyai solusi yang tak terbatas (unbounded solution).")
22
PEMECAHAN SISTEM PERSAMAAN LINIER

23
Pemecahan Sistem Persamaan Linier (1)
Permasalahan matematis utama dalam pemrograman linier adalah mendapatkan solusi dari suatu sistem persamaaan linier yang memaksimumkan atau meminimumkan suatu fungsi tujuan linier. Sistem persamaan linier dapat diselesaikan dengan menggunakan prosedur klasik Gauss-Jordan elimination.

24
Pemecahan Sistem Persamaan Linier (2)
Sistem dengan dua persamaan dengan lima variabel yang tak diketahui x1 – 2x2 + x3 – 4x4 + 2x5 = 2 x1 – x2 – x3 – 3x4 – x5 = 4 (S1) Karena terdapat lebih banyak jumlah variabel yang tak diketahui daripada persamaan, maka sistem mempunyai lebih dari satu solusi. Himpunan dari semua solusi yang mungkin dari sistem disebut himpunan solusi (solution set).
 Karena terdapat lebih banyak jumlah variabel yang tak. diketahui daripada persamaan, maka sistem mempunyai. lebih dari satu solusi. Himpunan dari semua solusi yang mungkin dari sistem. disebut himpunan solusi (solution set).")
25
Pemecahan Sistem Persamaan Linier (3)
Sistem ekivalen (equivalent system) Dua sistem persamaan dikatakan ekivalen jika kedua sistem mempunyai himpunan solusi yang sama. Metode untuk memecahkan suatu sistem persamaan adalah mendapatkan suatu sistem ekivalen yang mudah untuk dipecahkan.
 Dua sistem persamaan dikatakan ekivalen jika kedua sistem mempunyai himpunan solusi yang sama. Metode untuk memecahkan suatu sistem persamaan adalah mendapatkan suatu sistem ekivalen yang mudah untuk dipecahkan.")
26
Pemecahan Sistem Persamaan Linier (4)
Terdapat dua tipe operasi baris elementer(OBE) untuk mendapatkan sistem ekivalen Mengalikan sembarang persamaan dalam sistem dengan suatu bilangan positif atau negatif. Menambahkan ke sembarang persamaan dengan suatu konstanta pengali (positif, negatif atau nol) ke sembarang persamaan yang lain.
 untuk mendapatkan sistem ekivalen. Mengalikan sembarang persamaan dalam sistem dengan suatu bilangan positif atau negatif. Menambahkan ke sembarang persamaan dengan suatu konstanta pengali (positif, negatif atau nol) ke sembarang persamaan yang lain.")
27
Pemecahan Sistem Persamaan Linier (5)
x1 – 2x2 + x3 – 4x4 + 2x5 = 2 x1 – x2 – x3 – 3x4 – x5 = 4 (S1) x1 – 2x2 + x3 – 4x4 + 2x5 = 2 x2 – 2x3 + x4 – 3x5 = 2 Baris 2 dikurangi oleh baris 1 (S2) Baris 1 ditambah oleh dua kali dari baris 2 x – 3x3 – 2x4 – 4x5 = 6 x2 – 2x3 + x4 – 3x5 = 2 (S3)
 x1 – 2x2 + x3 – 4x4 + 2x5 = 2. x2 – 2x3 + x4 – 3x5 = 2. Baris 2 dikurangi oleh baris 1. (S2) Baris 1 ditambah oleh dua kali dari baris 2. x1 – 3x3 – 2x4 – 4x5 = 6. x2 – 2x3 + x4 – 3x5 = 2. (S3)")
28
Pemecahan Sistem Persamaan Linier (6)
Sistem S1, S2 dan S3 adalah ekivalen, yaitu solusi bagi satu sistem secara otomatis memberikan solusi bagi sistem yang lain. Untuk sistem S3, x3 = x4 = x5 = 0 akan memberikan x1 = 6, x2 = 2. Sistem S3 disebut sistem kanonik (canonical system). Variabel x1 dan x2 dari sistem kanonik disebut variabel basis (basic variable). Variabel basis (basic variable) Variabel xi dikatakan sebagai variabel basis jika dalam suatu persamaan ia muncul dengan koefisien satu pada persamaan tersebut, dan nol pada persamaan yang lain. Variabel non basis (nonbasic variable) Variabel yang bukan variabel basis. Operasi pivot (pivot operation) Suatu urutan operasi elementer yang mereduksi suatu sistem persamaan ke suatu sistem ekivalen untuk menghasilkan variabel basis. x1 – 2x2 + x3 – 4x4 + 2x5 = 2 x1 – x2 – x3 – 3x4 – x5 = 4 Solusi basis (basic solution) Solusi yang diperoleh dari suatu sistem kanonik dengan menetapkan nilai variabel non basis sama dengan nol dan memecahkan variabel basis. Solusi basis layak (basic feasible solution) Solusi basis dimana nilai variabel basisnya adalah tak negatif. (S1) x1 – 2x2 + x3 – 4x4 + 2x5 = 2 x2 – 2x3 + x4 – 3x5 = 2 (S2) x – 3x3 – 2x4 – 4x5 = 6 x2 – 2x3 + x4 – 3x5 = 2 (S3)
. Variabel x1 dan x2 dari sistem kanonik disebut variabel basis (basic variable). Variabel basis (basic variable) Variabel xi dikatakan sebagai variabel basis jika dalam suatu persamaan ia muncul dengan koefisien satu pada persamaan tersebut, dan nol pada persamaan yang lain. Variabel non basis (nonbasic variable) Variabel yang bukan variabel basis. Operasi pivot (pivot operation) Suatu urutan operasi elementer yang mereduksi suatu sistem persamaan ke suatu sistem ekivalen untuk menghasilkan variabel basis. x1 – 2x2 + x3 – 4x4 + 2x5 = 2. x1 – x2 – x3 – 3x4 – x5 = 4. Solusi basis (basic solution) Solusi yang diperoleh dari suatu sistem kanonik dengan menetapkan nilai variabel non basis sama dengan nol dan memecahkan variabel basis. Solusi basis layak (basic feasible solution) Solusi basis dimana nilai variabel basisnya adalah tak negatif. (S1) x1 – 2x2 + x3 – 4x4 + 2x5 = 2. x2 – 2x3 + x4 – 3x5 = 2. (S2) x1 – 3x3 – 2x4 – 4x5 = 6. x2 – 2x3 + x4 – 3x5 = 2. (S3)")
29
Latihan 4.c Operasi Pivot
x1 – 3x2 + x3 – 4x4 + 2x5 = 2 x1 – x2 – x3 – 3x4 – x5 = 4 1.Lakukan operasi pivot 2.Tentukan Variabel Basis 3.Tentukan Variabel Non Basis LATIHAN 4.c Operasi Pivot Jawablah pertanyaan di atas.(Dengan cara pengerjaan) Jawaban dituliskan pada buku catatan dengan Heading =
 Jawaban dituliskan pada buku catatan dengan Heading =")
30
Pemecahan Sistem Persamaan Linier (9)
Dengan m pembatas dan n variabel, jumlah maksimum dari solusi basis bagi LP dalam bentuk standar adalah terbatas dan diberikan oleh Per definisi, setiap solusi basis layak adalah solusi basis, maka jumlah maksimum solusi basis layak adalah juga terbatas dengan hubungan ini.

31
Pemecahan Sistem Persamaan Linier (10)
Dari kesimpulan dengan metode grafis: Jika terdapat suatu solusi optimal dari model LP, salah satu titik pojok (corner point) dari daerah layak adalah solusi optimal. Dengan mudah dapat ditunjukkan bahwa setiap titik pojok dari daerah layak berkaitan dengan suatu solusi basis layak dari persamaan pembatas. Ini berarti bahwa suatu solusi optimal dari model LP dapat diperoleh hanya dengan memeriksa solusi basis layaknya.
 dari daerah layak adalah solusi optimal. Dengan mudah dapat ditunjukkan bahwa setiap titik pojok dari daerah layak berkaitan dengan suatu solusi basis layak dari persamaan pembatas. Ini berarti bahwa suatu solusi optimal dari model LP dapat diperoleh hanya dengan memeriksa solusi basis layaknya.")
32
Pemecahan Sistem Persamaan Linier (11)
Pendekatan naif (naïve approach) untuk memecahkan masalah LP (yang mempunyai solusi optimal) dilakukan dengan membangkitkan semua solusi basis layak yang mungkin dengan sistem kanonik dan menentukan solusi basis layak mana yang memberikan nilai fungsi tujuan terbaik. Dengan metode simpleks (simplex method), pemecahan lebih efisien karena hanya memeriksa sebagian solusi basis layak.
 untuk memecahkan masalah LP (yang mempunyai solusi optimal) dilakukan dengan membangkitkan semua solusi basis layak yang mungkin dengan sistem kanonik dan menentukan solusi basis layak mana yang memberikan nilai fungsi tujuan terbaik. Dengan metode simpleks (simplex method), pemecahan lebih efisien karena hanya memeriksa sebagian solusi basis layak.")
33
BASIC FEASIBLE SOLUTION

34
BASIC SOLUTION OF SYSTEM
Jika fungsi pembatas adalah Ax = B, maka solusinya adalah dengan dan

35
Jika xB ≥ 0, maka x disebut BASIC FEASIBLE SOLUTION dari sistem tersebut.
B = basic matrix (basis) N = nonbasic matrix Komponen xB disebut variabel basis/ variabel dependent Komponen xN disebut variabel nonbasis/ variabel independent
 N = nonbasic matrix. Komponen xB disebut variabel basis/ variabel dependent. Komponen xN disebut variabel nonbasis/ variabel independent.")
36
Contoh Kasus (1) Fungsi pembatas sebagai berikut: x1 + x2 ≤ 6 x2 ≤ 3
 Fungsi pembatas sebagai berikut: x1 + x2 ≤ 6 x2 ≤ 3")
37
Contoh Kasus (2) Bentuk standard? x1 + x2 + = 6 x2 + = 3
Fungsi pembatas sebagai berikut: x1 + x2 ≤ 6 x2 ≤ 3 x1 , x2 ≥ 0 Contoh Kasus (2) Bentuk standard? x1 + x = 6 x = 3 x1 , x2 , x3 , x4 ≥ 0 x3 x4
 Bentuk standard x1 + x2 + = 6. x2 + = 3. x1 , x2 , x3 , x4 ≥ 0. x3. x4.")
38
Contoh Kasus (3) Bentuk standard? x1 + x2 + x3 = 6 x2 + x4 = 3
Matriks Pembatas A = [a1, a2, a3, a4]

39
Latihan 4.d Bentuk Standar dan Matrix Pembatas
Fungsi pembatas sebagai berikut: x1 + x2 ≤ 5 x ≤ 4 x1 , x2 ≥ 0 1.Tentukan bentuk standar 2.Tentukan Matrix Pembatas A LATIHAN 4.d Bentuk Standar dan Matrix Pembatas Jawablah pertanyaan di atas.(Dengan cara pengerjaan) Jawaban dituliskan pada buku catatan dengan Heading =
 Jawaban dituliskan pada buku catatan dengan Heading =")
40
Contoh Kasus (3) Basis yang mungkin: 1. B = [a1, a2] = XB =
![Contoh Kasus (3) Basis yang mungkin: 1. B = [a1, a2] = XB =](http://slideplayer.info/slide/3336747/11/images/40/Contoh+Kasus+%283%29+Basis+yang+mungkin%3A+1.+B+%3D+%5Ba1%2C+a2%5D+%3D+XB+%3D.jpg "Contoh Kasus (3) Basis yang mungkin: 1. B = [a1, a2] = XB =")
41
Latihan 4.e Penentuan xB Fungsi pembatas sebagai berikut: x1 + x2 ≤ 5
1.Tentukan xB LATIHAN 4.e Penentuan xB Jawablah pertanyaan di atas.(Dengan cara pengerjaan) Jawaban dituliskan pada buku catatan dengan Heading =
 Jawaban dituliskan pada buku catatan dengan Heading =")
42
Contoh Kasus (4) 3. B = [a2, a3] = XB = 4. B = [a2, a4] = XB =
Poin 1, 2, 3, dan 5 merupakan basic feasible solution Poin 4 merupakan solusi basis yang tidak feasible
![Contoh Kasus (4) 3. B = [a2, a3] = XB = 4. B = [a2, a4] = XB =](http://slideplayer.info/slide/3336747/11/images/42/Contoh+Kasus+%284%29+3.+B+%3D+%5Ba2%2C+a3%5D+%3D+XB+%3D+4.+B+%3D+%5Ba2%2C+a4%5D+%3D+XB+%3D.jpg "Poin 1, 2, 3, dan 5 merupakan basic feasible solution. Poin 4 merupakan solusi basis yang tidak feasible.")
43
Contoh Kasus (6) 4 XB = 1 3 2 5
 4 XB =")
44
Latihan 4.e Penentuan xB Fungsi pembatas sebagai berikut: x1 + x2 ≤ 5
1.Tentukan xB 2.Tentukan Basic Feasible Solution 3.dan Solusi Basis non Feasible LATIHAN 4.e Penentuan xB Jawablah pertanyaan di atas.(Dengan cara pengerjaan) Jawaban dituliskan pada buku catatan dengan Heading =
 Jawaban dituliskan pada buku catatan dengan Heading =")
45
Tambahan: Mencari Inverse Matriks

46
Matrik Invers Suatu bilangan jika dikalikan dengan kebalikannya, maka hasilnya adalah 1. Misalkan atau = 1, Demikian juga halnya dengan matrik A.A-1 = A-1.A = I Maka : Jika tidak ditemukan matrik A-1, maka A disebut matrik tunggal (singular)
")
47
Maka , A-1 diperoleh dengan rumus : 1. A.A-1 = I 2. 3.
Invers matrik 2 x 2 : Maka , A-1 diperoleh dengan rumus : 1. A.A-1 = I 2. 3. Jika ad – bc = 0, maka matrik A non-invertibel OBE Metode Gauss-Jordan

48
Mencari invers dengan definisi Langkah-langkahnya :
Dibuat suatu matrik invers dengan elemen-elemen matrik permisalan sehingga mendapatkan suatu persamaan jika dilakukan perkalian dengan matriknya. Perkalian matrik dengan matrik inversnya menghasilkan matrik identitas Dilakukan penyelesaian persamaan melalui eliminasi ataupun substitusi sehingga diperoleh nilai elemen-elemen matrik invers. A A-1 = A-1 A = I

49
2) Mencari invers dengan OBE (Operasi Baris Elementer)
Langkah-langkah : Dilakukan OBE pada hingga diperoleh dengan memperhatikan definisi operasi berikut: OBE

50
Matriks Elementer: (E)
Matriks A(nxn) disebut elementer bila dengan sekali melakukan Operasi Baris Elementer (OBE) terhadap matriks identitas In. B2(5) B2(1/5) B12 B12 B32(4) B32(-4) B3= B3+ 4B2 B3= B3+(- 4)B2
 disebut elementer bila dengan sekali melakukan Operasi Baris Elementer (OBE) terhadap matriks identitas In. B2(5) B2(1/5) B12. B12. B32(4) B32(-4) B3= B3+ 4B2. B3= B3+(- 4)B2.")
51
Notasi sebagai berikut :
E = matrik elementer, maka EA = matrik baru yang terjadi bila OBE tersebut dilakukan pada matrik A. Notasi sebagai berikut : OBE A = EA = A Contoh : Ek…..E2E1A = In OBE B12 E.A B12

52
Tunjukkan bahwa matrik adalah perkalian matrik elementer
Tunjukkan bahwa matrik adalah perkalian matrik elementer ! Jawab : Dari penyelesaian dengan OBE yang menghasilkan matrik identitas, maka matrik A adalah matrik invertible Dengan demikian, matrik A dapat dituliskan sebagai hasil kali dari matrik elementer. B12 B21(-2) B12(1) B2(-1/3)
 B12(1) B2(-1/3)")
53
Kita memiliki E4E3E2E1A = I dengan : Matrik elementer ini menyatakan operasi baris elementer untuk membentuk matrik A menjadi matrik identitas. Dengan demikian :

54
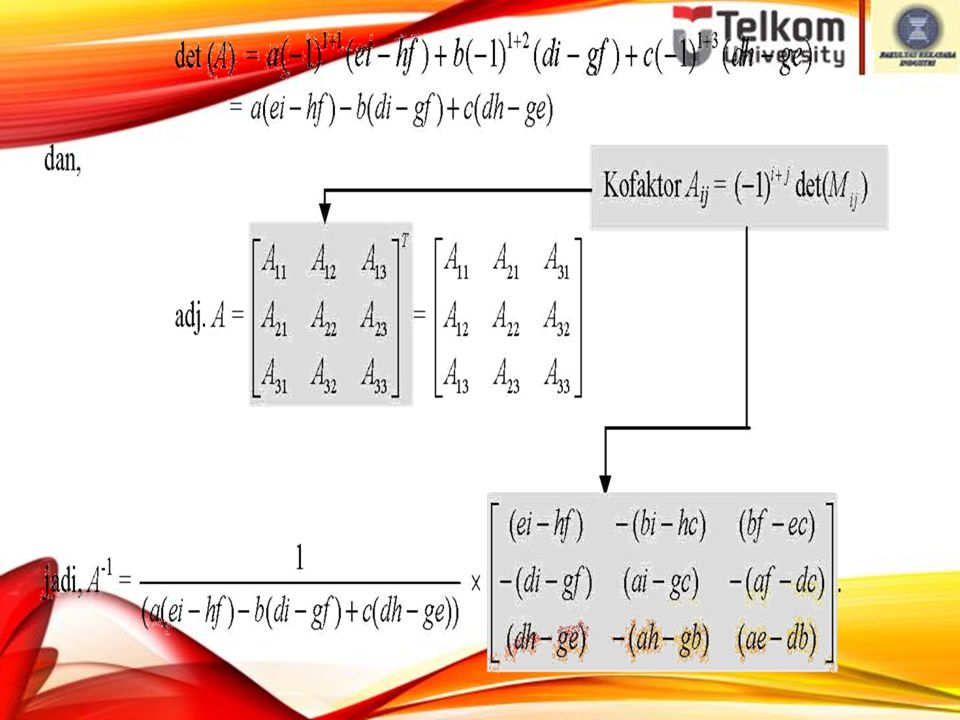
3) Mencari Invers dengan Matrik Adjoint
Langkah-langkah : Hitung Cari matrik adjoint dengan terlebih dahulu menentukan matrik kofaktor. Matrik adjoint merupakan matrik transpose dari matrik kofaktor. Matrik invers diperoleh dengan mengkalikan matrik adjoint dengan seper-determinan |A| ≠ 0

55
Matrik kofaktor dan matrik adjoint
Jika baris ke i dan kolom j dibuang, maka disebut minor ke ij dari matrik A. Kofaktor ke ij dari matrik A adalah :

56
Matrik kofaktor dari A adalah :

57
Sehingga diperoleh matrik kofaktor A :
Matrik adjoint merupakan matrik transpose dari matrik kofaktor.

58
Kesimpulan : Matrik Adj (A) dari A2x2 = C11 = M11 = d C12 = - M12 = - c C21 = - M21 = - b C22 = M22 = a = adj(A) =
 =")
59
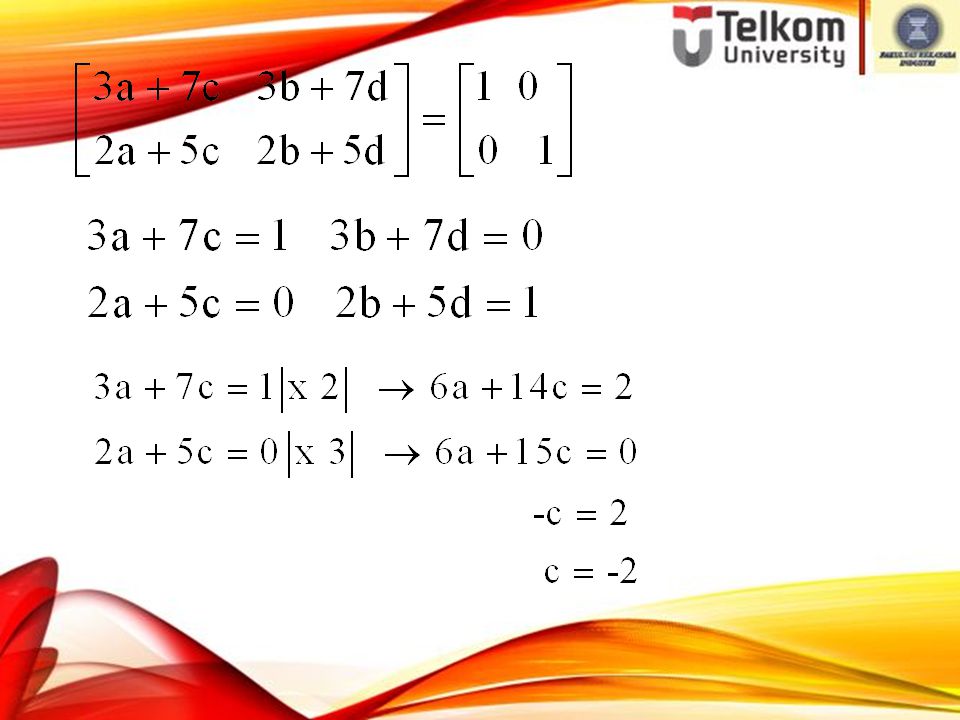
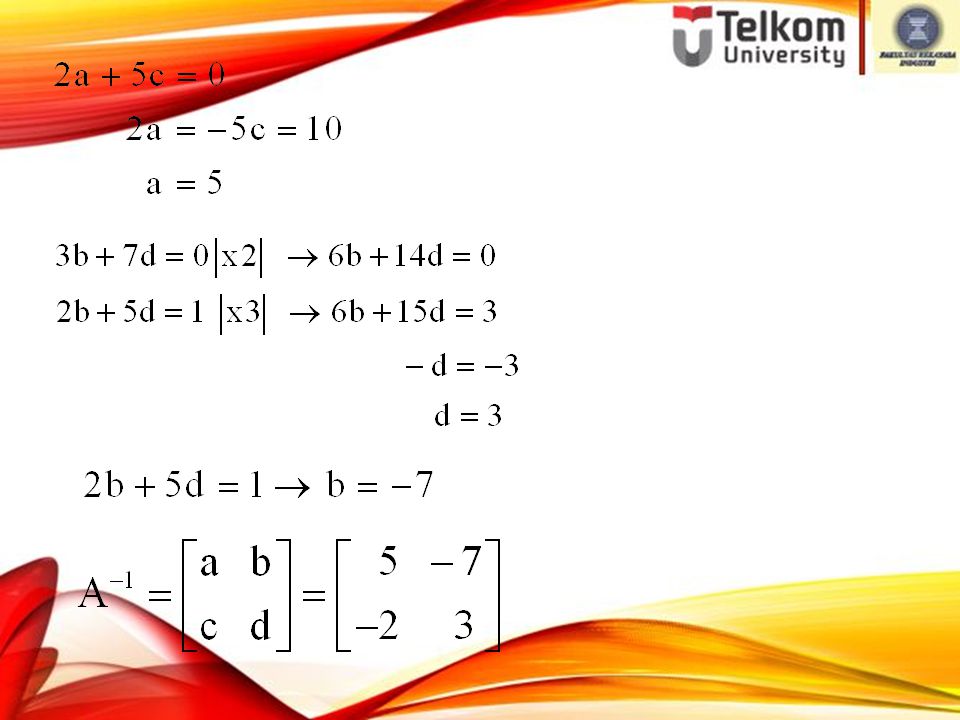
Contoh soal : = Carilah matrik invers dari : Jawab : Cara 1)
Misalkan : =

62
Cara 2) OBE (A | I) (I | A-1)
 OBE (A | I) (I | A-1)")
63
Cara 3) :
 :")
64
Cari matrik invers dengan OBE dari matrik berikut :
Jawab : (A | I) (I | A-1) OBE B21(-3) B2(-1/2) B12(-2)
 (I | A-1) OBE. B21(-3) B2(-1/2) B12(-2)")
65
3. Tentukan A-1 dan B-1 pada matrik berikut ini :
A = and B = |A| = 1(4) – 2(3) = -2 ≠ 0, so A have an inverse |B| = 4(16) – 8(8) = 0, so B not have an inverse
 – 2(3) = -2 ≠ 0, so A have an inverse. |B| = 4(16) – 8(8) = 0, so B not have an inverse.")
66
Invers matrik 3 x 3 Sama seperti mencari invers matrik 2 x 2, hanya diperlukan ketelitian yang lebih dibandingkan mencari invers matrik 2 x 2.

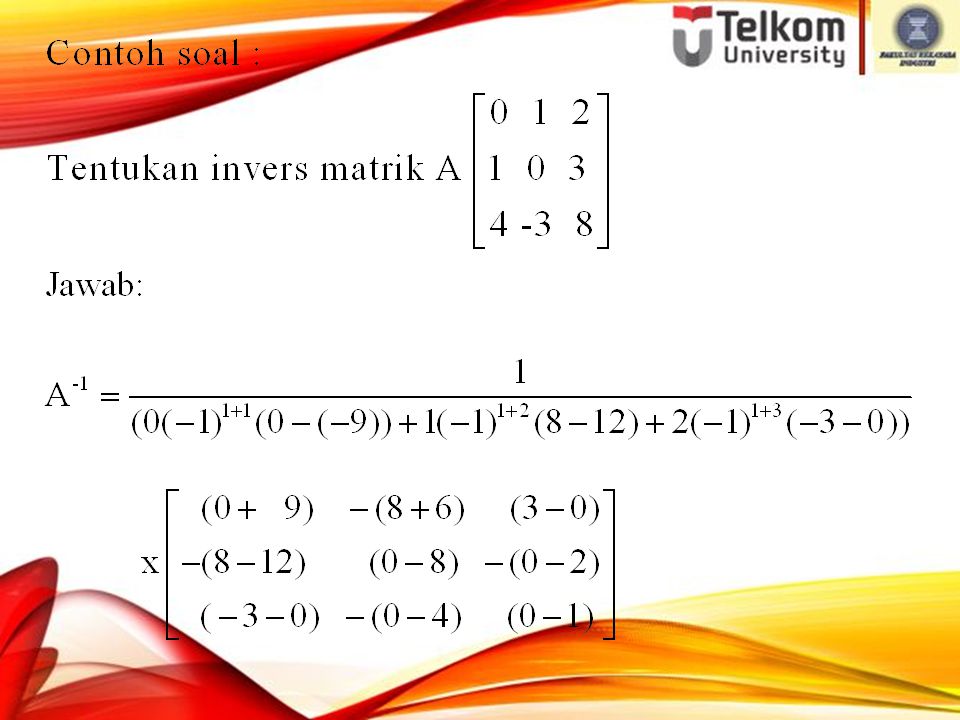
70
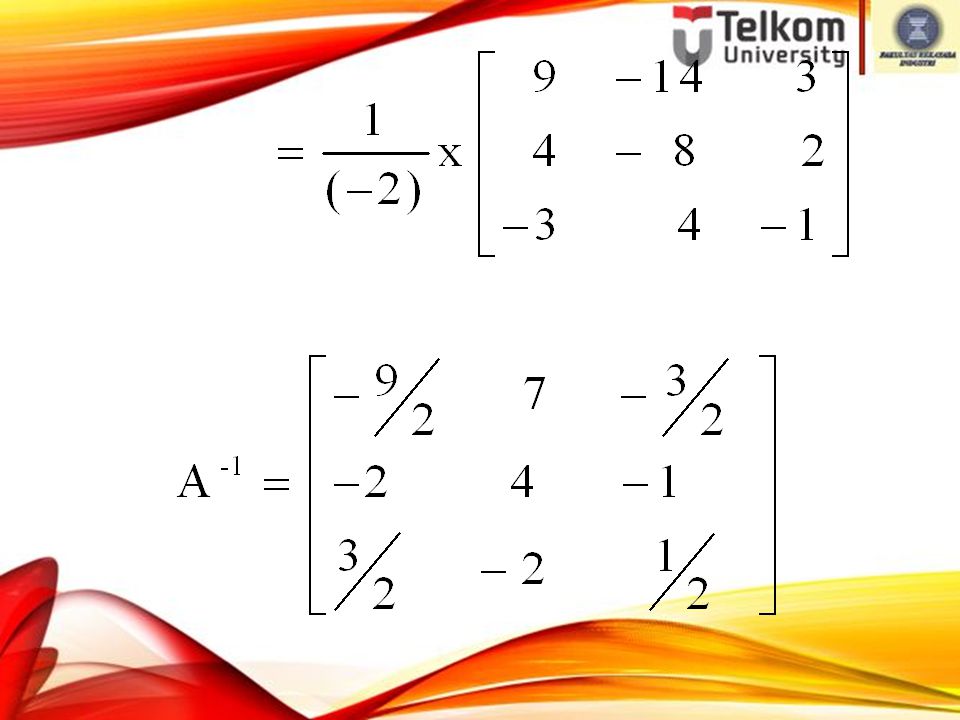
Carilah invers dari A = Jawab : C11 = M11 = - 5 C31 = M31 = - 4 C12 = - M12 = 1 C32 = - M32 = 0 C13 = M13 = 1 C33 = M33 = 2 C21 = - M21 = 4 C22 = M22 = - 2 C23 = - M23 = 0

71
adj(A) = = |A| = a11C11 + a12C12 + a13C13 = (2)(-5) + (4)(1) + (4)(1) = - 2 A-1 = = =
 = = |A| = a11C11 + a12C12 + a13C13 = (2)(-5) + (4)(1) + (4)(1) = - 2 A-1 = = =")
72
Carilah invers dari B = dengan melakukan OBE ! Jawab : (B | I) = B13 ~ B21(1) B31(2) ~
 = B13 ~ B21(1) B31(2) ~")
73
B1(-1) B3(-1/2) ~ B13(-3) B23(1) ~ B12(-2) ~
 B3(-1/2) ~ B13(-3) B23(1) ~ B12(-2) ~")
74
= (I | B-1) Jadi B-1 =
 Jadi B-1 =")
75
Cari matrik invers dari
Jawab : OBE B21(-2) B31(1) Karena elemen baris ke 3 pada matrik kiri semua nol, maka matrik A tidak punya invers (non-invertibel) B32(1)
 B31(1) Karena elemen baris ke 3 pada matrik kiri semua nol, maka matrik A tidak punya invers (non-invertibel) B32(1)")
76
Selamat belajar

Presentasi serupa




>")


![SISTEM PERSAMAAN LINIER [INVERS MATRIK]](/8/2326796/big_thumb.jpg "SISTEM PERSAMAAN LINIER [INVERS MATRIK]>")



>")








