Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
BAB VIII RUANG HASILKALI DALAM (lanjutan)
")
2
8.2 Sudut dan Ortogonalitas di dalam Ruang Hasilkali Dalam
8.2.1 Ketidaksamaan Cauchy-Schwarz Jika u dan v adalah vektor-vektor tak-nol di dalam R2 atau R3 dan adalah sudut diantara keduanya, maka atau u . v = <u, v>, sehingga Karena |cos | 1, maka

3
Teorema 8.2.1 Ketidaksamaan Cauchy-Scwarz
Jika u dan v adalah vektor-vektor di dalam sebuah ruang hasilkali dalam real, maka |<u . v>| ||u|| ||v|| <u, v>2 <u, u><v , v> <u, v>2 ||u||2 ||v||2

4
Teorema 8.2.2 Sifat-sifat Panjang
Jika u dan v adalah vektor-vektor di dalam sebuah ruang hasilkali dalam V, dan jika k adalah skalar sembarang, maka: (a) ||u|| 0 (b) ||u|| = 0 jika dan hanya jika u = 0 (c) ||ku|| = |k| ||u|| (d) ||u + v|| ||u|| + ||v|| (Ketidaksamaan segitiga)
 ||u|| 0. (b) ||u|| = 0 jika dan hanya jika u = 0. (c) ||ku|| = |k| ||u|| (d) ||u + v|| ||u|| + ||v|| (Ketidaksamaan segitiga)")
5
Teorema 8.2.3 Sifat-sifat Jarak
Jika u, v, dan w adalah vektor-vektor di dalam sebuah ruang hasilkali dalam V, dan jika k adalah skalar sembarang, maka: (a) d(u, v) 0 (b) d(u, v) = 0 jika dan hanya jika u = v (c) d(u, v) = d(v, u) 0 d(u, v) d(u,w) + d(w, v) (Ketidaksamaan segitiga)
 d(u, v) 0. (b) d(u, v) = 0 jika dan hanya jika u = v. (c) d(u, v) = d(v, u) 0. d(u, v) d(u,w) + d(w, v) (Ketidaksamaan segitiga)")
6
8.2.2 Sudut di antara dua vektor
Misal u dan v adalah vektor-vektor tak-nol di dalam sebuah ruang hasilkali dalam V. Dari teorema diketahui bahwa <u, v>2 ||u||2 ||v||2 Jika dibagi dengan ||u||2 ||v||2 , didapat atau ekivalen dengan Jadi dan 0

7
Contoh 8.1 Cosinus dua sudut diantara dua vektor Misal R4 memiliki hasilkali dalm Euclidean. Tentukan cosinus sudut diantara vektor-vektor u = (4, 3, 1, –2) dan v = (–2, 1, 2, 3) Penyelesian
 dan v = (–2, 1, 2, 3) Penyelesian.")
8
Ortogonalitas Permasalahan penting di dalam semua ruang hasilkali dalam adalah menentukan apakah dua buah vektor saling ortogonal, yaitu apakah sudut yang diapit kedua vektor tersebut adalah = /2 Definisi Dua vektor u dan v di dalam sebuah ruang hasilkali dalam dikatakan ortogonal jika 〈u, v〉 = 0.

9
Contoh 8.2 Vektor-vektor Ortogonal pada M22 Jika M22 memiliki hasilkali dalam, tentukan apakah matriks-matriks u dan v berikut ortogonal atau tidak ortogonal. Penyelesaian 〈U, V〉 = = 0 Karena tr(UTV) = 0, maka matriks U dan V ortogonal
 = 0, maka matriks U dan V ortogonal.")
10
Contoh 8.3 Vektor-vektor Ortogonal pada P2 Misal P2 memiliki hasilkali dalam dan misalkan p = x dan q = x2. Tentukan apakah vektor-vektor p dan q ortogonal relatif terhadap hasilkali dalam yamg diberikan! Penyelesaian

11
Karena 〈p, q〉 = 0, maka vektor p = x dan q = x2
adalah ortogonal relatif terhadap hasilkali dalam yang diberikan.

12
Teorema 8.2.4 Generalisasi Teorema Pythagoras
Jika u dan v adlah vektor-vektor ortogonal di dalam sebuah ruang hasilkali dalam, maka ||u + v|| = ||u||2 + ||v||2 Contoh 8.4 Teorema Pythagoras pada P2 Dari contoh 8.3 telah diketahui bahwa p = x dan q = x2 adalah ortogonal relatif terhadap hasilkali dalam Tentukan ||p + q||2

13
Penyelesaian ||p + q||2 = ||p||2 + ||q||2 (Generalisasi Teorema Pythagoras) Dari contoh 8.3 didapat
 Dari contoh 8.3 didapat")
14
Latihan Tentukan apakah vektor-vektor berikut ortogonal jika mengacu pada hasilkali dalam Euclidean. a) u = (–1, 3, 2); v = (4, 2, –1) b) u = (–4, 6, –10, 1); v = (2, 1, –2, 9) 2. Jika hasilkali dalam M22 adalah 〈A, B〉 = tr(ATB)= tr(BTA)
 u = (–1, 3, 2); v = (4, 2, –1) b) u = (–4, 6, –10, 1); v = (2, 1, –2, 9) 2. Jika hasilkali dalam M22 adalah 〈A, B〉 = tr(ATB)= tr(BTA)")
15
8.3 Basis Otonormal; Proses Gram-Schmidt; Dekomposisi QR
Definisi Suatu himpunan vektor-vektor di dalam sebuah ruang hasilkali dalam disebut sebagai himpunan ortogonal (orthogonal set) jika setiap pasangan vektor yang berbeda di dalam himpunan tersebut adalah ortogonal. Sebuah himpunan ortogonal yang vektor-vektornya memiliki norma 1 disebut ortonormal (orthonormal). Contoh 8.5 Himpunan Ortogonal pada R3 Misal R3 memiliki hasilkali dalam dan u1 = (0, 1, 0), u2 = (0, 1, 0), u3 = (0, 1, 0). Buktikan bahwa S = {u1, u2, u3} adalah ortogonal!
 jika setiap pasangan vektor yang berbeda di dalam himpunan tersebut adalah ortogonal. Sebuah himpunan ortogonal yang vektor-vektornya memiliki norma 1 disebut ortonormal (orthonormal). Contoh 8.5. Himpunan Ortogonal pada R3. Misal R3 memiliki hasilkali dalam dan u1 = (0, 1, 0), u2 = (0, 1, 0), u3 = (0, 1, 0). Buktikan bahwa S = {u1, u2, u3} adalah ortogonal!")
16
Contoh 8.5 Himpunan Ortogonal pada R3 Misal R3 memiliki hasilkali dalam dan u1 = (0, 1, 0), u2 = (0, 1, 0), u3 = (0, 1, 0). Buktikan bahwa S = {u1, u2, u3} adalah ortogonal Penyelesaian <u1, u2> = (0)(0) + (1)(0) + (0)(1) = 0 <u1, u3> = (0)(1) + (1)(0) + (0)(–1) = 0 <u2, u3> = (1)(1) + (0)(0) + (1)(–1) = 0 Karena <u1, u2> = <u1, u3> = <u2, u3> = 0, maka S = {u1, u2, u3} adalah ortogonal.
(0) + (1)(0) + (0)(1) = 0. <u1, u3> = (0)(1) + (1)(0) + (0)(–1) = 0. <u2, u3> = (1)(1) + (0)(0) + (1)(–1) = 0. Karena <u1, u2> = <u1, u3> = <u2, u3> = 0, maka. S = {u1, u2, u3} adalah ortogonal.")
17
Contoh 8.6 Membentuk Himpunan Ortonormal Dari contoh 8.5 didapat: Normalisasi u1, u2, u3 didapat v1, v2, v3 yaitu: Karena <v1, v2> = <v1, v3> = <v2, v3> = 0, dan ||v1|| = ||v2|| = ||v3|| = 1, maka himpunan S = {v1, v2, v3} adalah ortonormal.

18
8.3.1 Koordinat-koordinat Relatif thd Basis Ortonormal Teorema 8.3.1
Jika S = {v1, v2, …, vn} adalah sebuah basis ortonormal untuk sebuah ruang hasilkali dalam V, dan u adalah sebuah vektor sembarang pada V, maka u = <u, v1> v1 + <u, v2> v2 +… + <u, vn> vn Contoh 8.7 Vektor Koordinat Relatif terhadap Basis Ortonormal Misal v1 = (0, 1, 0), v2 = (–4/5, 0, 3/5), v3 = (3/5, 0, 4/5) dan S = {v1, v2, v3} adalah sebuah basis ortonormal yang memiliki hasilkali dlm Euclidean. Nyatakan vektor u = (1, 1, 1) sebagai sebuah kombinasi linier dari vektor-vektor di dalam S, dan tentukan (u)S, yaitu vektor koordinat dari u relatif terhadap basis ortonormal S.
, v2 = (–4/5, 0, 3/5), v3 = (3/5, 0, 4/5) dan S = {v1, v2, v3} adalah sebuah basis ortonormal yang memiliki hasilkali dlm Euclidean. Nyatakan vektor. u = (1, 1, 1) sebagai sebuah kombinasi linier dari vektor-vektor di dalam S, dan tentukan (u)S, yaitu vektor koordinat dari u relatif terhadap basis ortonormal S.")
19
Penyelesaian <u, v1> = (1)(0) + (1)(1) + (1)(0) = 1 <u, v2> = (1)(–4/5) + (1)(0) + (1)(3/5) = –1/5 <u, v3> = (1)(3/5) + (1)(1) + (1)(4/5) = 7/5 u = <u, v1> v1 + <u, v2> v2 + <u, v3> v3 = (1) v1 + (–1/5) v2 + (7/5) v3 = v1 –1/5 v2 + 7/5 v3 (1, 1, 1) = (0, 1, 0) – 1/5 (–4/5, 0, 3/5) + 7/5 (3/5, 0, 4/5) Vektor koordinat dari u relatif terhadap S adalah (u)S = (<u, v1>,<u, v2>,<u, v3>) = (1, –1/5, 7/5)
(3/5) + (1)(1) + (1)(4/5) = 7/5. u = <u, v1> v1 + <u, v2> v2 + <u, v3> v3. = (1) v1 + (–1/5) v2 + (7/5) v3 = v1 –1/5 v2 + 7/5 v3. (1, 1, 1) = (0, 1, 0) – 1/5 (–4/5, 0, 3/5) + 7/5 (3/5, 0, 4/5) Vektor koordinat dari u relatif terhadap S adalah. (u)S = (<u, v1>,<u, v2>,<u, v3>) = (1, –1/5, 7/5)")
20
Teorema 8.3.2 Jika S adalah sebuah basis ortonormal untu sebuah ruang hasilkali dalam berdimensi n, dan jika (u)S = (u1, u2, …, un) dan (v)S = (v1, v2, …, vn) maka: c) <u, v> = u1 v1 + u2 v2 + … + un vn
S = (u1, u2, …, un) dan (v)S = (v1, v2, …, vn) maka: c) <u, v> = u1 v1 + u2 v2 + … + un vn.")
21
Dari contoh 8.7 didapat (u)S = (1, –1/5, 7/5)
Menghitung Norma dengan Menggunakan Basis Ortonormal Jika R3 memiliki hasilkali dalam Euclidean dan memiliki basis ortonormal S = {v1, v2, v3}. Tentukan norma vektor u = (1, 1, 1) dengan mengacu pada vektor koordinat (u)S. Penyelesaian Dari contoh 8.7 didapat (u)S = (1, –1/5, 7/5)
 dengan mengacu pada vektor koordinat (u)S. Penyelesaian. Dari contoh 8.7 didapat (u)S = (1, –1/5, 7/5)")
22
8.3.2 Koordinat-koordinat Relatif thd Basis Ortogonal
Teorema 8.3.1 Jika S = {v1, v2, …, vn} adalah sebuah basis ortogonal untuk sebuah ruang vektor V, maka normalisasi tiap-tiap vektor di dalam basis ini akan menghasilkan basis ortonormal, Sehingga, jika u adalah sebuah vektor sembarang di dalam V, berdasarkan Teorema akan diperoleh

23
atau Teorema 8.3.3 Jika S = {v1, v2, …, vn} adalah suatu himpunan ortogonal vektor-vektor tak-nol pada sebuah ruang hasilkali dalam, maka S bebas linier 8.3.3 Proyeksi Ortogonal Di dalam R2 dan R3 yang memiliki hasilkali dalam Euclidean, secara geometrik dapat dibuktikan bahwa jika W adalah sebuah garis atau sebuah bidang yang melewati titik asal ruang, maka tiap-tiap vektor u di dalam ruang dapat dinyatakan sebagai jumlah, u = w1 + w2

24
u W w1 w2 O u W w1 w2 O Teorema 8.3.4 Teorema Proyeksi Jika W adalah sebuah subruang berdimensi terhingga dari suatu ruang hasilkali dalam V, maka setiap vektor u di dalam V dapat dinyatakan dengan tepat cara sebagai u = w1 + w2 di mana w1 terletak pada W dan w2 terletak pada W⊥.

25
Vektor w1 pada teorema 8.3.1 disebut sebagai proyeksi
Ortogonal u pada W (orthogonal projection of u on W) dan dinotasikan dengan projW u. Jadi w1 = projW u Vektor w2 disebut sebagai komponen u yang ortogonal terhadap W (component of u orthogonal to W) dan dinotasikan dengan projW⊥ u. Jadi w2 = projW⊥ u u W w2 = u – projW u O w1 = projW u
 dan dinotasikan dengan projW u. Jadi w1 = projW u. Vektor w2 disebut sebagai komponen u yang ortogonal. terhadap W (component of u orthogonal to W) dan. dinotasikan dengan projW⊥ u. Jadi w2 = projW⊥ u. u. W. w2 = u – projW u. O. w1 = projW u.")
26
Dari Teorema 8.3.4 diketahui bahwa
u = w1 + w2 u = projW u + projW⊥ u Karena w2 = u – w1, maka diperoleh projW⊥ u = u – projW u Sehingga u dapat dihitung juga dengan rumus u = projW u + (u – projW u)
")
27
Teorema 8.3.5 Misal W adalah sebuah subruang berdimensi terhingga dari suatu ruang hasilkali dalam V. Jika {v1, v2, …, vr} adalah sebuah basis ortonormal untuk W, dan u adalah sebuah vektor sembarang pada V, maka projW u = <u, v1> v1 + <u, v2> v2 +… + <u, vr> vr b) Jika {v1, v2, …, vr} adalah sebuah basis ortogonal untuk W, dan u adalah sebuah vektor sembarang pada V, maka
 Jika {v1, v2, …, vr} adalah sebuah basis ortogonal untuk W, dan u adalah sebuah vektor sembarang pada V, maka.")
28
Proyeksi ortogonal dari vektor u = (1, 1, 1) pada W adalah:
Contoh 8.9 Menghitung Proyeksi Misal R3 memiliki hasilkali dalam Euclidean dan W adalah subruang yang direntang oleh vektor-vektor otonormal v1 = (0, 1, 0), dan v2 = (–4/5, 0, 3/5). Proyeksi ortogonal dari vektor u = (1, 1, 1) pada W adalah: projW u = <u, v1> v1 + <u, v2> v2 = (1)(0, 1, 0) + (–1/5)(–4/5, 0, 3/5) = (0, 1, 0) + )(4/25, 0, –3/25) = (4/25, 1, –3/25) Komponen u = (1, 1, 1) yang ortogonal terhadap W adalah: projW⊥ u = u – projW u = (1, 1, 1) – (4/25, 1, –3/25) = (21/25, 0, 28/25).
, dan v2 = (–4/5, 0, 3/5). Proyeksi ortogonal dari vektor u = (1, 1, 1) pada W adalah: projW u = <u, v1> v1 + <u, v2> v2. = (1)(0, 1, 0) + (–1/5)(–4/5, 0, 3/5) = (0, 1, 0) + )(4/25, 0, –3/25) = (4/25, 1, –3/25) Komponen u = (1, 1, 1) yang ortogonal terhadap W adalah: projW⊥ u = u – projW u = (1, 1, 1) – (4/25, 1, –3/25) = (21/25, 0, 28/25).")
29
{u1, u2, …, un} adalah basis sembarang untuk V.
8.3.4 Menentukan Basis Ortogonal dan Basis Ortonormal Teorema 8.3.6 Setiap ruang hasilkali dalam tak-nol berdimensi terhingga memiliki basis ortonormal Proses Gram-Schmidt untuk mengkonversi suatu basis sembarang menjadi sebuah basis ortogonal Misal V adalah suatu ruang hasilkali dalam tak-nol berdimensi terhingga sebarang, dan misalkan {u1, u2, …, un} adalah basis sembarang untuk V. Urutan berikut akan menghasilkan sebuah basis ortogonal {v1, v2, …, vn} untuk V.

30
Langkah 1 Misal v1 = u1 Langkah 2 Vektor v2 yang ortogonal terhadap v1 dihitung dengan menggunakan rumus W1 projW1 u2 v1 u2 v2 = u2 – projW1 u2

31
Langkah 3 Untuk mendapatkan vektor v3 yang ortogonal terhadap v1 maupun v2 dihitung dengan menggunakan rumus, W2 v3 = u3 – projW2 u3 v1 v2 u3 projW2 u3

32
Langkah 4 Untuk mendapatkan vektor v3 yang ortogonal terhadap v1, v2, maupun v3 dihitung dengan menggunakan rumus,

33
Contoh 8.10 Menggunakan Proses Gram-Schmidt Perhatikan ruang vektor R3 yang memiliki hasilkali dalam Euclidean. Terapkan proses Gram-Schmidt untuk mengubah vektor-vektor basis u1 = (1, 1, 1), u2 = (0, 1, 1), dan u3 = (0, 0, 1) menjadi sebuah basis ortogonal {v1, v2, v3}; kemudian normalisasikan vektor-vektor basis ortogonal untuk memperoleh basis ortonormal{q1, q2, q3}. Penyelesaian
, u2 = (0, 1, 1), dan u3 = (0, 0, 1) menjadi sebuah basis ortogonal {v1, v2, v3}; kemudian normalisasikan vektor-vektor basis ortogonal untuk memperoleh basis ortonormal{q1, q2, q3}. Penyelesaian.")
34
Langkah 1 v1 = u1 = (1, 1, 1) Langkah 2 Langkah 3
 Langkah 2 Langkah 3")
35
Sehingga v1 = (1, 1, 1), v2 = (–2/3, 1/3, 1/3), dan
v3 = (0, –1/2, 1/2) membentuk sebuah basis ortogonal untuk R3. Norma vektor-vektor v1, v2, dan v3 adalah sehingga basis ortonormal untuk R3 adalah
 membentuk sebuah basis ortogonal. untuk R3. Norma vektor-vektor v1, v2, dan v3 adalah. sehingga basis ortonormal untuk R3 adalah.")
36
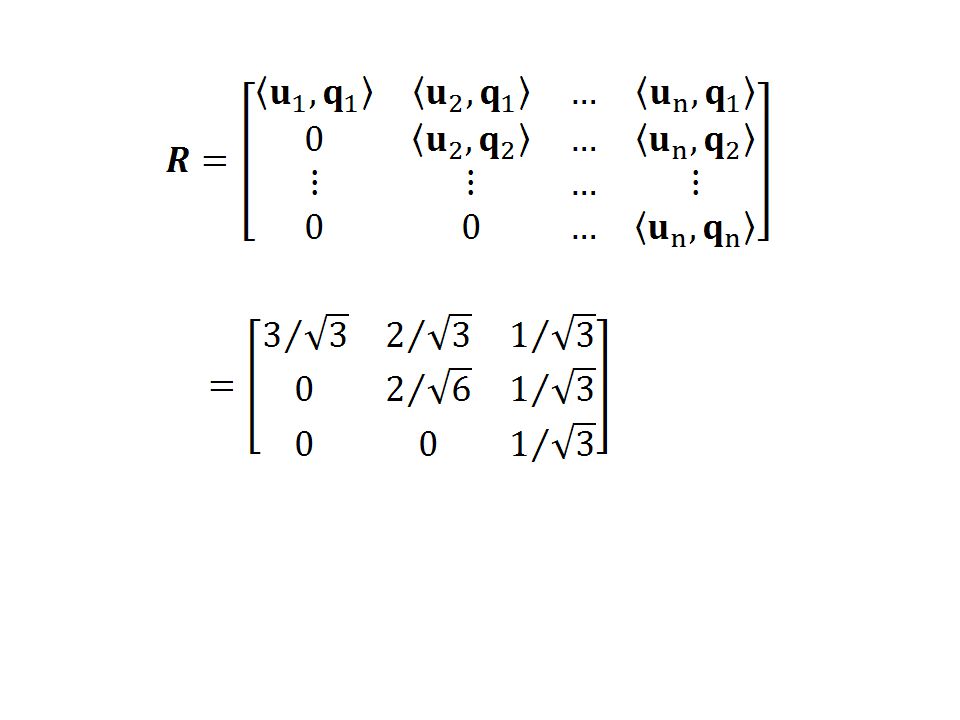
8.3.5 Dekomposisi QR Teorema 8.3.7 Jika A adalah sebuah matriks m x n yang memiliki vektor-vektor kolom yang bebas linier, maka A dapat difaktorkan sebagai A = QR, dimana Q adalah sebuah matriks m x n yang memiliki vektor-vektor kolom ortonormal, dan R adalah sebuah matriks segitiga atas n x n yang dapar dibalik dan mempunyai bentuk,

37
Contoh 8.11 Dekomposisi QR sebuah Matriks 3 x 3 Tentukan dekomposisi QR dari matriks Penyelesian Vektor-vektor kolom dari A

38
Langkah 1 v1 = u1 = (1, 1, 1)
")
39
Langkah 2

40
Langkah 3

43
Dekomposisi QR dari matriks A adalah
A Q R

44
Latihan Jika R2 memiliki hasilkali dalam Euclidean, identifikasi himpunan vektor berikut , apakah merupakan himpunan ortogonal, ortonormal, atau bukan keduanya. 2. Tentukan dekomposisi QR dari matriks

Presentasi serupa


>")









>")


>")



 VEKTOR.>")

.>")