Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
Sidikrubadi Pramudito Dept. Fisika FMIPA IPB
Kesetimbangan dan Keuntungan Mekanik Sidikrubadi Pramudito Dept. Fisika FMIPA IPB

2
Kesetimbangan Translasi (dua dimensi)
w Lima tahap penyelesaian kesetimbangan translasi Gambarkan sketsa gaya-gaya yang bekerja pada benda Pilih sistem koordinat yang memudahkan dan uraikan gaya-gaya yang bekerja pada benda dalam komponen-komponennya pada sumbu-sumbu koordinat yang telah dipilih tersebut Gunakan dua persamaan di atas untuk menyusun sistem persamaan linear pada komponen gaya-gaya tersebut Selesaikan sistem persamaan tersebut untuk mencari besaran-besaran yang tidak diketahui Masukkan harga numerik dari besaran yang sudah diketahui pada sistem persamaan di atas untuk mendapatkan jawaban yang diinginkan

3
Contoh A B w Hitung tegangan tali A dan B jika berat beban w =100 N, = 37 dan = 53

4
Jawab TA w TB x y A B w TAy w TBy TBx TAx

5
Gerak Translasi Murni dan Gerak Umum Benda Tegar
Dalam gerak translasi murni, semua titik pada benda berpindah pada lintasan yang sejajar. Gerak yang umum merupakan kombinasi dari gerak translasi dan gerak rotasi

6
Menurut hukum ke dua Newton, gaya neto menyebabkan benda bergerak dengan percepatan
Apakah yang menyebabkan roda mobil bisa bertambah cepat putarannya? TORKA

7
TORKA Jika anda memberikan gaya tegak lurus bidang pintu, anda akan mendapati bahwa semakin jauh titik tangkap gaya yang diberikan dari sumbu maka semakin mudah pintu terbuka. F r

8
TORKA (lanjutan) Jika anda memberikan gaya pada arah sejajar bidang pintu, maka pintu tidak bergerak, karena engsel pintu menahan pintu tersebut. F r

9
TORKA (lanjutan) Gaya F membentuk sudut terhadap r
Lengan gaya: l = r sin Torka: F r l

10
Contoh: The Achilles Tendon
Jika ketika kaki melangkah, otot Achiles memberikan gaya sebesar 720 N, tentukan torka dari gaya tersebut terhadap sambungan engsel yang terletak pada jarak 3,6 10-2 m dari titik P! (Sumber : J.D. Cutnell & K.W. Johnson, Introduction to Physics, 9th ed. Wiley, Singapore, 2013, p.242)
")
11
Jawab 790 N

12
Keseimbangan Benda Tegar
Jika benda tegar dalam keadaan setimbang berarti :

13
Lima tahap penyelesaian kesetimbangan translasi
Tentukan benda tegar yang akan dibahas kesetimbangannya Gambarkan sketsa gaya-gaya yang bekerja pada benda tersebut Pilih sistem koordinat yang memudahkan dan uraikan gaya-gaya yang bekerja pada benda dalam komponen-komponennya pada sumbu-sumbu koordinat yang telah dipilih tersebut Gunakan tiga buah persamaan di bawah untuk menyusun sistem persamaan linear pada komponen gaya-gaya tersebut Selesaikan sistem persamaan tersebut untuk mencari besaran-besaran yang tidak diketahui Masukkan harga numerik dari besaran yang sudah diketahui pada sistem persamaan di atas untuk mendapatkan jawaban yang diinginkan

14
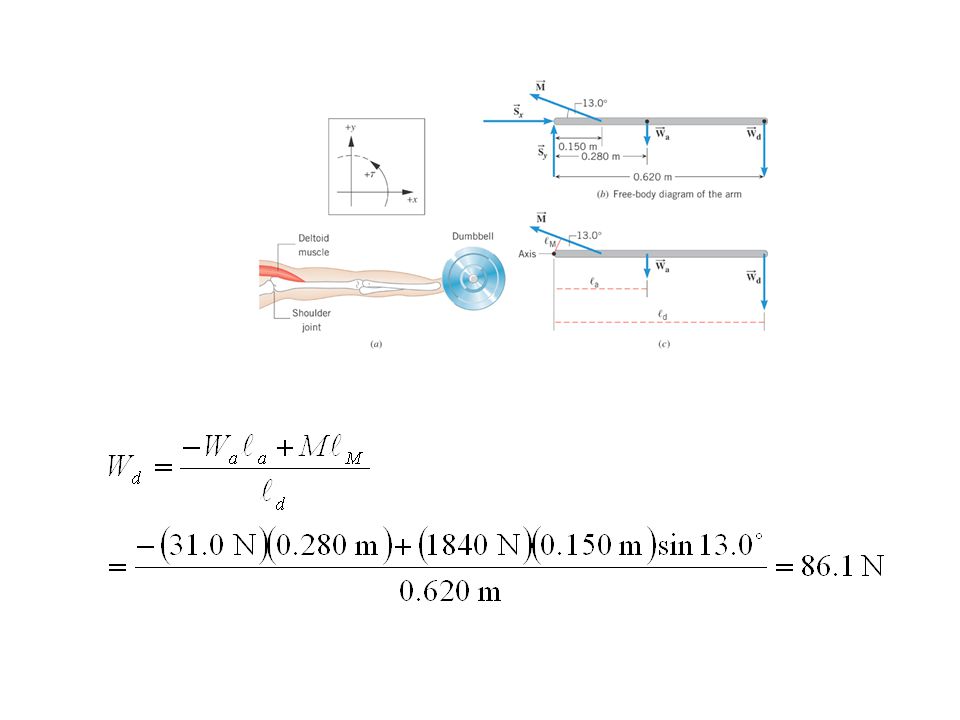
Contoh The arm is horizontal and weighs 31.0 N. The deltoid muscle can supply 1840 N of force. What is the weight of the heaviest dumbell he can hold? (Sumber : J.D. Cutnell & K.W. Johnson, Introduction to Physics, 9th ed. Wiley, Singapore, 2013, p.246)
")
15
Jawab:

17
Pusat Gravitas (Center of Gravity)
DEFINISI PUSAT GRAVITAS Pusat gravitas adalah titik di mana berat total sebuah benda bekerja sehingga torka yang dihasilkannya terhadap sembarang titik adalah sama dengan torka yang dihasilkan oleh berat masing-masing partikel yang membentuk benda tersebut. (Sumber : J.D. Cutnell & K.W. Johnson, Introduction to Physics, 9th ed. Wiley, Singapore, 2013, p.247)
")
18
9.3 Center of Gravity

19
Example 6 The Center of Gravity of an Arm
The horizontal arm is composed of three parts: the upper arm (17 N), the lower arm (11 N), and the hand (4.2 N). Find the center of gravity of the arm relative to the shoulder joint.
, the lower arm (11 N), and the hand. (4.2 N). Find the center of gravity of the. arm relative to the shoulder joint.")
20
9.3 Center of Gravity

21
9.3 Center of Gravity Finding the center of gravity of an irregular shape.

22
Mesin Mekanik Mesin mekanik: perangkat yang mentransmisikan gaya atau torka untuk suatu kepentingan tertentu. Pada dasarnya sebuah mesin merupakan kombinasi dari tiga mesin dasar yaitu pengungkit, bidang miring dan tekanan hidraulik. Keuntungan mekanik aktual (actual mechanical advantage, AMA) dari suatu mesin adalah perbandingan antara gaya keluaran Fout dan gaya masukan Fin.
 dari suatu mesin adalah perbandingan antara gaya keluaran Fout dan gaya masukan Fin.")
23
Keuntungan Mekanik Ideal
Pada mesin ideal kehilangan energi karena adanya gesekan diabaikan sehingga kerja oleh gaya keluaran Fout adalah sama dengan kerja oleh gaya masukan Fin Beban Mesin Ideal Fout Fin sout sin

24
Contoh Hitunglah keuntungan me-kanik ideal dari mesin katrol ideal (massa katrol dan gesekan diabaikan) Jawab: Beban : w Fin

25
Efisiensi Pada mesin yang sebenarnya, keberadaan gesekan tidak dapat dihindarkan sehingga Fin pada keadaan sebenarnya lebih besar dibandingkan pada keadaan ideal. Dengan demikian kerja masukan lebih besar dibandingkan kerja keluaran karena ada energi yang hilang karena adanya gesekan. Dengan demikian efisiensi dapat dituliskan sebagai:

26
Contoh Beban sebesar 500 N ditarik ke atas dengan menggunakan gaya sebesar Fin = 260 N, tentukan efisiensi mesin tersebut! Jawab: Beban : w Fin

27
Pengungkit Lin Lout Fin Fout Lin Lout Fin Fout Lin Lout Fin Fout

28
Transmisi Torka Fin Fout rin rout

29
Bidang Miring Fin w h L

30
SEKIAN TERIMAKASIH

Presentasi serupa
















.>")


