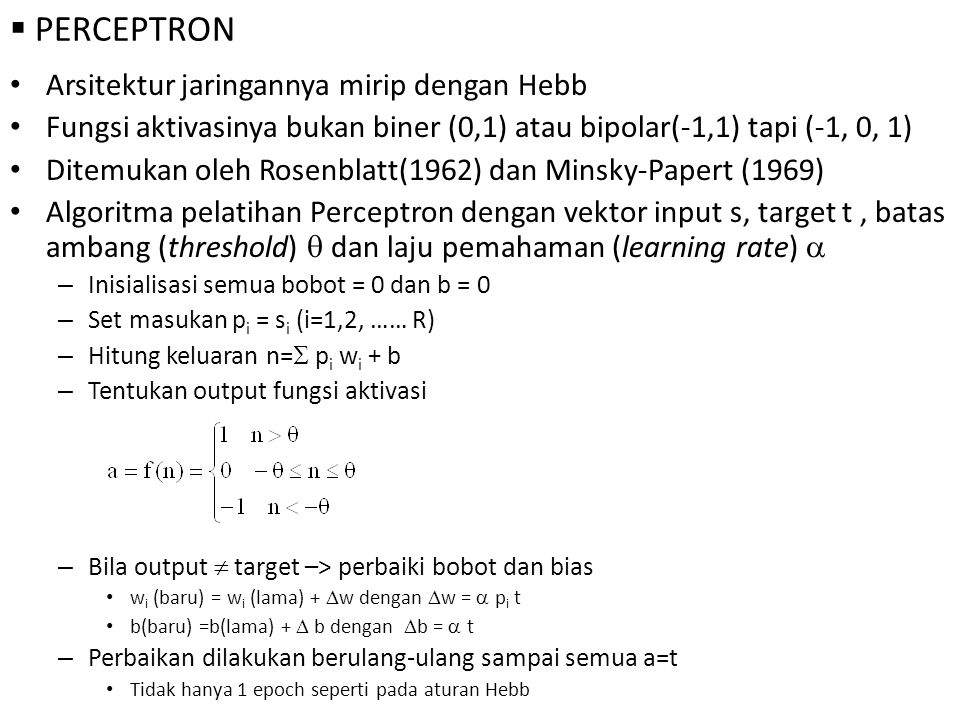
PERCEPTRON Arsitektur jaringannya mirip dengan Hebb Fungsi aktivasinya bukan biner (0,1) atau bipolar(-1,1) tapi (-1, 0, 1) Ditemukan oleh Rosenblatt(1962) dan Minsky-Papert (1969) Algoritma pelatihan Perceptron dengan vektor input s, target t , batas ambang (threshold) dan laju pemahaman (learning rate) Inisialisasi semua bobot = 0 dan b = 0 Set masukan pi = si (i=1,2, …… R) Hitung keluaran n= pi wi + b Tentukan output fungsi aktivasi Bila output target –> perbaiki bobot dan bias wi (baru) = wi (lama) + w dengan w = pi t b(baru) =b(lama) + b dengan b = t Perbaikan dilakukan berulang-ulang sampai semua a=t Tidak hanya 1 epoch seperti pada aturan Hebb
Contoh Soal 2.1 Buat jaringan Perceptron untuk menyatakan fungsi logika AND dengan menggunakan masukan biner dan keluaran bipolar. Pilih = 1 dan = 0,2 Jawab : Pola hubungan masukan-target : p1 p2 t -1 1 f w1 w2 p1 p2 n a b 1
Masukan Target Output Perubahan bobot w = pi t b = t Bobot baru wbaru = wlama + w bbaru = blama + b p1 p2 1 t n a=f(n) w1 w2 b w1 w2 b Epoch ke - 1 -1 Masukan Target Output Perubahan bobot w = pi t b = t Bobot baru wbaru = wlama + w bbaru = blama + b p1 p2 1 t n a=f(n) w1 w2 b w1 w2 b Epoch ke - 2 -1
Masukan Target Output Perubahan bobot w = pi t b = t Bobot baru wbaru = wlama + w bbaru = blama + b p1 p2 1 t n a=f(n) w1 w2 b w1 w2 b Epoch ke - 3 -1 Masukan Target Output Perubahan bobot w = pi t b = t Bobot baru wbaru = wlama + w bbaru = blama + b p1 p2 1 t n a=f(n) w1 w2 b w1 w2 b Epoch ke - 4 -1
Masukan Target Output Perubahan bobot w = pi t b = t Bobot baru wbaru = wlama + w bbaru = blama + b p1 p2 1 t n a=f(n) w1 w2 b w1 w2 b Epoch ke - 5 -1 Masukan Target Output Perubahan bobot w = pi t b = t Bobot baru wbaru = wlama + w bbaru = blama + b p1 p2 1 t n a=f(n) w1 w2 b w1 w2 b Epoch ke - 6 -1
Masukan Target Output Perubahan bobot w = pi t b = t Bobot baru wbaru = wlama + w bbaru = blama + b p1 p2 1 t n a=f(n) w1 w2 b w1 w2 b Epoch ke - 7 -1 Masukan Target Output Perubahan bobot w = pi t b = t Bobot baru wbaru = wlama + w bbaru = blama + b p1 p2 1 t n a=f(n) w1 w2 b w1 w2 b Epoch ke - 8 -1
Latihan Soal 2.2 Buat jaringan Perceptron untuk mengenali pola pada tabel di bawah ini. Gunaka = 1 dan = 0,1. p1 p2 p3 t 1 -1 Jawab : Masukan Target Output Perubahan bobot w = pi t b = t Bobot baru wbaru = wlama + w bbaru = blama + b p1 p2 p3 1 t a w1 w2 w3 b w1 w2 w3 b Inisialisasi -1