Kontrol Motor Induksi dan Motor Sinkron
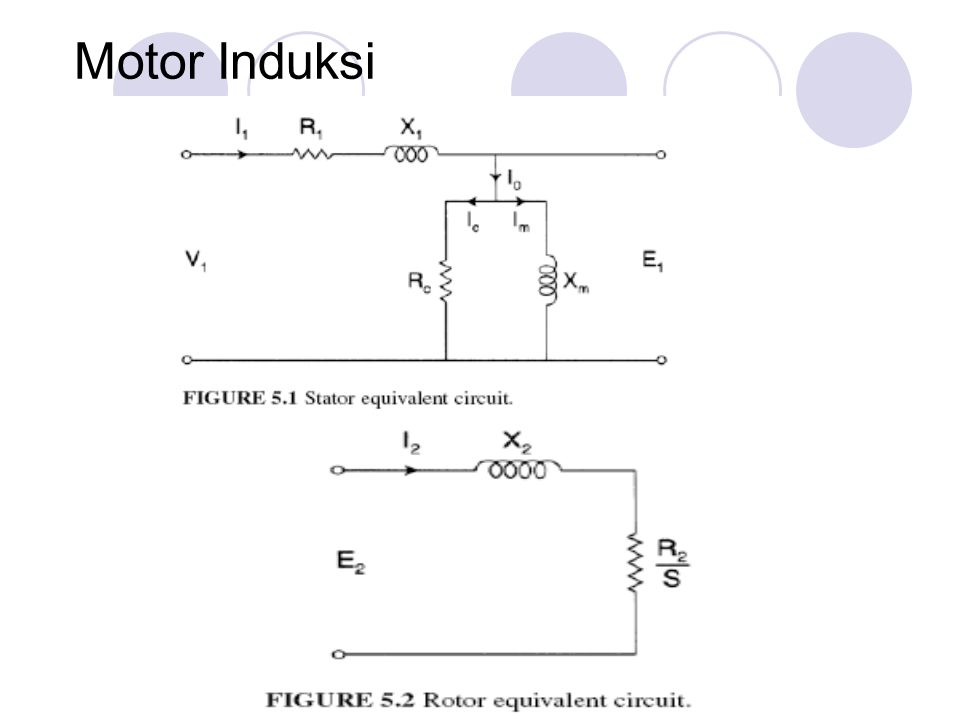
Motor Induksi
Contoh A three-phase, 15-hp, 460-V, four-pole, 60- Hz, 1710-r/min induction motor delivers full output power to the load connected to its shaft. The friction and windage loss of the motor is 820 W. Determine the : (a) echanical power developed and (b) the rotorcopper loss.
Penentuan Parameter Rangkaian Ekivalen
MOTOR SELECTION FOR A CONSTANT LOAD
MOTOR SELECTION FOR A VARIABLE LOAD
MOTOR SINKRON
Pendahuluan Motor sinkron berputar pada kondisi steady state pada kecepatan sinkron. Kecepatan sinkron bergantung pada frekuensi sumber tegangan dan jumlah kutub mesin. Kecepatan motor sinkron bebas pengaruh beban bila beban sesuai dengan kemampuan dari motor. Jika torka beban melebihi dari torka maksimum motor, motor akan tetap diam dan torka yang dibangkitkan adalah nol. Untuk alasan ini motor sinkron disebut juga not inherently self-starting. Bila motor sinkron beroperasi tanpa beban dan hanya digunakan untuk memperbaiki faktor daya, disebut dengan synchronous condenser.
Kontruksi dan Operasi Motor Sinkron Kontruksi jangkar (armature) motor sinkron sama dengan kontruksi generator sinkron. Kecepatan sinkron dalam rpm adalah: Rotor motor sinkron memiliki belitan medan yang menghasilkan fluks konstan dalam motor. Bila belitan medan di eksitasi dengan sumber dc, akan menghasilkan kutub-kutub berlawanan pada permukaan rotor (sama dengan generator sinkron).
Asumsikan rotor dalam kondisi diam dan belitan medan di eksitasi untuk menghasilkan kutub-kutub di rotor. Medan putar yang dihasilkan jangkar dapat divisualisasikan sebagai sebagai dua magnet (utara dan selatan), berputar konstan di atas kutub-kutub rotor. Bila kutub selatan dari medan putar di atas kutub utara rotor, gaya bekerja keduanya yang mengakibatkan rotor bergerak dalam arah sesuai dengan medan putar. Oleh karena massa yang berat dari rotor, ini membutuhkan waktu untuk dapat mulai berputar, tetapi selanjutnya medan putar polaritasnya berubah. Sekarang gaya tolak antara kedua polaritas menyebabkan rotor bergerak pada arah berlawanan. Begitu selanjutnya.
Selanjutnya torka rata-rata yang dihasilkan rotor adalah nol. Oleh karena itu motor sinkron adalah motor tak start-sendiri. Untuk menstarting motor sinkron dibutuhkan peralatan bantu untuk membangkitkan torka start sendiri atau dapat digerakkan dengan memutar rotor hingga pada kecepatan sinkron oleh penggerak mula lain dan disinkronisasi dengan eksitasi arus medan.
Starting Motor Sinkron Ada 3 metoda dasar yang dapat digunakan untuk menjalankan motor sinkron: 1. Starting dengan mengurangi frekuensi listrik. 2. Starting dengan penggerak mula eksternal. 3. Starting dengan menggunakan belitan bantu (amortisseur winding).
Starting Dengan Mengurangi Frekuensi Jika medan magnetik pada motor sinkron berputar dengan kecepatan yang cukup rendah, maka rotor akan dapat berputar dan mengalami percepatan yang akan sesuai dengan kecepatan putaran medan magnetik stator. Kecepatan dari medan magnetik dapat dinaikkan ke kecepatan operasi dengan menaikkan secara bertahap frekuensi kefrekuensi normal. Metoda ini dapat dilakukan dengan menggunakan rectifier inverter dan cycloconverter, yang mana dapat digunakan untuk mengubah input frekuensi konstan ke output frekuensi yang diinginkan. Maka, starting atau menjalankan motor induksi dapat dilakukan dengan mudah dengan mengatur frekuensi dari nilai yang sangat rendah untuk starting dan menaikkannya ke frekuensi kerja yang diinginkan untuk kecepatan normal.
Starting Dengan Penggerak Mula Eksternal Penggerak mula eksternal digunakan untuk membuat motor sinkron berputar mencapai kecepatan penuhnya (kecepatan kerja). Setelah mencapai kecepatan penuh, motor dihubungkan ke sumber tegangan dan penggerak mula di off kan.
Starting dengan menggunakan belitan bantu (amortisseur winding) Untuk membuat motor sinkron starting sendiri (self- starting), dapat digunakan belitan tambahan yang disebut damper winding (induction winding atau amortisseur winding) yang menghasilkan kutub bantu motor. Damper winding atau disebut juga squirrel cage winding, adalah belitan hubung singkat. Pada mesin-mesin kecil, squirrel cage winding diletakkan pada laminasi-laminasi rotor. Pada mesin-mesin besar, squirrel cage winding dibentuk dengan batang-batang konduktor di dalam slot-slot dan dihubung singkat pada kedua bagian ujungnya.
Prosedur Untuk motor sinkron yang menggunakan amortisseur winding dapat dijalankan dengan prosedur: 1.Putuskan hubungan belitan medan dengan sumber dc dan hubungsinkatkan. 2.Berikan sumber tegangan tiga fasa pada stator motor dan biarkan rotor berputar hingga mencapai kecepatan sinkronnya. 3.Hubungkan belitan medan dengan sumber dc dan rotor akan berputar dengan kecepatan sinkron.
Damper winding dapat juga berupa rotor belitan. Damper winding rotor belitan digunakan bila: a. Kontrol kecepatan motor. b. Dibutuhkan torka start yang tinggi.
Rangkaian Ekivalen Motor Sinkron
Diagram Fasor a. pf lagging b. pf unity c. pf leading
Aliran Daya Motor Sinkron
Motor Sinkron Kutub Salient
Efek Eksitasi Kondisi Beban Nol Untuk melihat pengaruh eksitasi pada kinerja motor sinkron, kita asumsikan motor adalah ideal, dengan kondisi sebagai berikut: 1. resistansi belitan jangkar diabaikan. 2. rugi-rugi putaran diabaikan. 3. tegangan terminal konstan (bus). Kerja sebuah motor sinkron yang ideal pada beban nol yaitu dengan tanpa arus jangkar. Hal ini dengan membuat tegangan harus sama dan berlawanan dengan tegangan eksitasi. Bila motor berputar pada kecepatan konstan dan frekuensi sumber juga konstan, tegangan eksitasi dapat diubah hanya dengan mengubah arus eksitasi. Ketika arus eksitasi diubah untuk memperoleh tegangan eksitasi yang sama dengan tegangan yang diberikan, ini dinamakan dengan eksitasi normal (100%). Tidak ada daya yang dihasilkan motor, sudut daya nol.
Motor Sinkron Sebagai Koreksi Faktor Daya Motor sinkron yang digunakan untuk meningkatkan faktor daya sistem disebut dengan synchronous condenser.
Keselurahan daya yang dibutuhkan adalah: Faktor daya keseluruhan:
Contoh Sebuah pabrik menggunakan daya 100 kVA dengan faktor daya 0,6 lagging pada kondisi kerja normal. Motor sinkron ditambahkan dalam sistem untuk memperbaiki keseluruhan faktor daya. Daya yang dibutuhkan motor sinkron adalah 10 kW. a.Tentukan faktor daya keseluruhan bila motor sinkron bekerja dengan faktor daya 0,5 leading. b.Berapa faktor daya motor sinkron bila diinginkan peningkatan faktor daya keseluruhan menjadi 0,9 lagging. Jawab. a. Kondisi beban:
Contoh Kondisi motor sinkron: Daya keseluruhan adalah: Faktor daya adalah:
Contoh b. Untuk faktor daya 0,9 lagging, θt = 25,84 0 (lag). Daya nyata tetap 70 kW, dan daya kVA adalah 70/0,9 = 77,778 kVA. Maka: Daya pada motor sinkron sekarang menjadi: faktor daya motor sinkron:
Latihan 1 Konsumsi suatu pabrik adalah 2000 kVA dengan faktor daya 0,45 lagging. Sebuah motor sinkron ditambahkan dalam sistem untuk meningkatkan faktor daya menjadi 0,8 lagging. Jika daya motor sinkron adalah 100 kW, tentukan faktor daya dan rating kVA motor sinkron.
Latihan 2 Suatu pabrik memiliki beban keseluruhan sebesar 360 kW dengan faktor daya 0,6 lagging, termasuk sebuah motor induksi dengan daya 50 hp pada efisiensi 80% dan faktor daya 0,866 lagging. Bila motor induksi tersebut diganti dengan sebuah motor sinkron dengan daya dan efisiensi yang sama, faktor daya keseluruhan sistem menjadi 0,8 lagging. Tentukan rating kVA dan faktor daya motor sinkron tersebut.
TERIMA KASIH