Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
Ekonometrika Lanjutan
Program Studi Statistika Semester Genap 2015/2016 Rahma Fitriani, S.Si., M.Sc., P.hD

2
Peramalan Peramalan adalah bagian penting dari analisis ekonometrika:
GDP, inflasi, nilai tukar mata uang, harga saham tingkat pengangguran dll pada beberapa periode ke depan Untuk kepentingan pengambilan kebijakan, keputusan atau strategi di masa datang Sehubungan dengan data deret waktu: Autoregressive integrated moving average (ARIMA) Metodologi Box Jenkins (BJ) Vector autoregression (VAR). Ada pula peramalan yang melibatkan sifat volatilitas dari variabel pengamatan Mis: Harga saham, nilai tukar Variabilitias tinggi (ketidakstabilan) pada satu periode biasanya diikuti oleh beberapa periode yang tidak stabil pula (volatility clustering),
 Metodologi Box Jenkins (BJ) Vector autoregression (VAR). Ada pula peramalan yang melibatkan sifat volatilitas dari variabel pengamatan. Mis: Harga saham, nilai tukar. Variabilitias tinggi (ketidakstabilan) pada satu periode biasanya diikuti oleh beberapa periode yang tidak stabil pula (volatility clustering),")
3
Model yang diigunakan menekankan pada sifat ketidakstabilan ragam (heterokedastisitas)
Autoregressive conditional heteroscedasticity (ARCH) Generalized autoregressive conditional heteroscedasticity (GARCH) VAR Pemodelan VAR menyerupai pemodelan persamaan simultan. Pada model VAR dilibatkan beberapa variabel endogen secara bersama – sama, akan tetapi setiap variabel endogen dijelaskan oleh nilai dirinya sendiri di masa lalu dan nilai masa lalu variabel – variabel engoden lainnya. Tidak dilibatkan variabel eksogen di dalam model
 Generalized autoregressive conditional heteroscedasticity (GARCH) VAR. Pemodelan VAR menyerupai pemodelan persamaan simultan. Pada model VAR dilibatkan beberapa variabel endogen secara bersama – sama, akan tetapi setiap variabel endogen dijelaskan oleh nilai dirinya sendiri di masa lalu dan nilai masa lalu variabel – variabel engoden lainnya. Tidak dilibatkan variabel eksogen di dalam model.")
4
Model – model ARIMA Metode peramalan dengan menganalisis sifat – sifat peluang/stokastik suatu deret waktu dengan filosofi “let the data speak for themselves (biarkan data berbicara sendiri)” Berbeda dengan regresi di mana Yt dijelaskan oleh k variabel X Pemodelan ARIMA memungkinkan dibentuknya model di mana Yt dijelaskan oleh nilai Y di masa lalu (lagged value of Y) dan suku – suku galat. Karena sifat tersebut, model – model ARIMA seringkali dinyatakan sebagai model atheoretic. Suatu model yang tidak berdasarkan pada teori ekonomi. Padahal di dalam pembentukan regresi, teori ekonomi harus digunakan sebagai dasar pembentukan model.
 Berbeda dengan regresi di mana Yt dijelaskan oleh k variabel X. Pemodelan ARIMA memungkinkan dibentuknya model di mana Yt dijelaskan oleh nilai Y di masa lalu (lagged value of Y) dan suku – suku galat. Karena sifat tersebut, model – model ARIMA seringkali dinyatakan sebagai model atheoretic. Suatu model yang tidak berdasarkan pada teori ekonomi. Padahal di dalam pembentukan regresi, teori ekonomi harus digunakan sebagai dasar pembentukan model.")
5
Semua proses mengasumsikan bahwa deret waktu yang dimodelkan bersifat stasioner
Proses autoregressive orde ke – p (AR (p)): Proses di mana nilai Y pada periode ke t tergantung pada nilai – nilainya di satu, dua atau secara umum sampai dengan p periode sebelumnya. Proses Moving Average orde ke - q(MA(q)) Proses di mana Y pada periode ke t merupakan kombinasi linier dari galat (white noise) periode yang sama sampai dengan galat (white noise) dari q periode sebelumnya.
): Proses di mana nilai Y pada periode ke t tergantung pada nilai – nilainya di satu, dua atau secara umum sampai dengan p periode sebelumnya. Proses Moving Average orde ke - q(MA(q)) Proses di mana Y pada periode ke t merupakan kombinasi linier dari galat (white noise) periode yang sama sampai dengan galat (white noise) dari q periode sebelumnya.")
6
Proses autoregressive orde ke – p dan moving average orde ke – q (ARMA(p,q)):
Proses di mana Y pada periode ke t mempunyai karakteristik prose AR(p) maupun MA (q) Proses autoregressive integrated moving average (ARIMA(p, d, q) Proses ARMA (p,q) yang diterapkan pada deret yang tidak stasioner, akan tetapi terintegrasi pada orde (d) I(d) Deret mengalami pembedaan sampai dengan pembedaan ke – d untuk mencapai stasioner Y*t adalah deret hasil pembedaan yang sudah stasioner
 maupun MA (q) Proses autoregressive integrated moving average (ARIMA(p, d, q) Proses ARMA (p,q) yang diterapkan pada deret yang tidak stasioner, akan tetapi terintegrasi pada orde (d) I(d) Deret mengalami pembedaan sampai dengan pembedaan ke – d untuk mencapai stasioner. Y*t adalah deret hasil pembedaan yang sudah stasioner.")
7
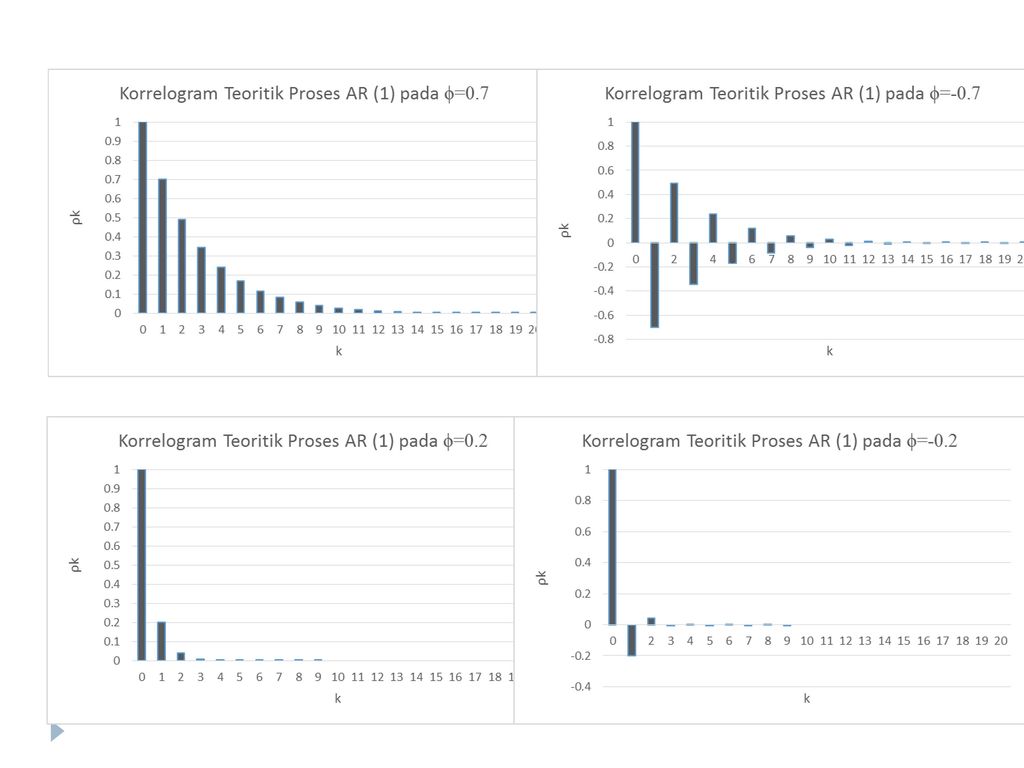
Fungsi Autokorelasi dan Fungsi Autokorelasi Parsial proses AR(1) dan MA (1) secara teoritis
Autokorelasi ke – k: Autokorelasi pada proses AR (1) Secara rekursif diperoleh:
 Secara rekursif diperoleh:")
8
Fungsi Autokorelasi dan Fungsi Autokorelasi Parsial proses AR(1) dan MA (1) secara teoritis
Dari fungsi autokorelasi secara teori tersebut, dapat ditunjukkan bahwa autokorelasi dari proses AR(1), dengan syarat 0<ϕ<1 menurun secara eksponensial seiring time lag Akan tetapi, setelah dibentuk korrelogram, diagram tersebut tidak menunjukkan indikator penentu ordo dari proses AR Untuk itu diperlukan alat/fungsi tambahan yaitu PACF
, dengan syarat 0<ϕ<1 menurun secara eksponensial seiring time lag. Akan tetapi, setelah dibentuk korrelogram, diagram tersebut tidak menunjukkan indikator penentu ordo dari proses AR. Untuk itu diperlukan alat/fungsi tambahan yaitu PACF.")
10
Fungsi Autokorelasi dan Fungsi Autokorelasi Parsial proses AR(1) dan MA (1) secara teoritis
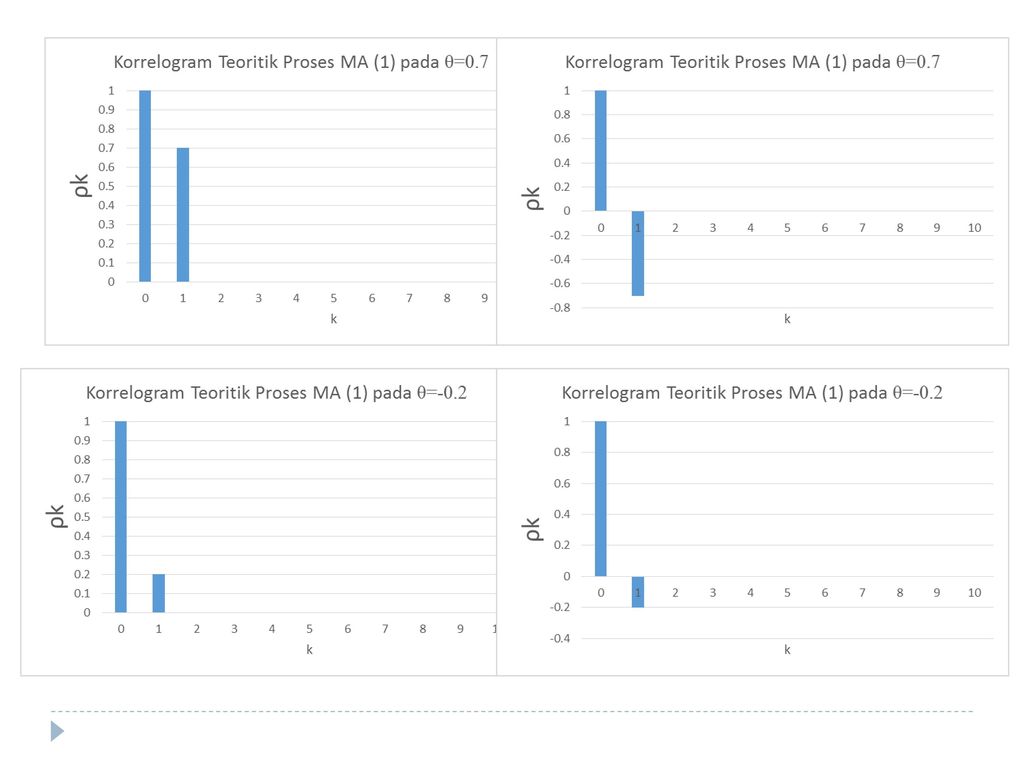
Autokorelasi pada proses MA (1) Dengan asumsi bahwa tidak ada autokorelasi pada galat tidak ada korelasi antar galat pada waktu yang berbeda:
 Dengan asumsi bahwa tidak ada autokorelasi pada galat tidak ada korelasi antar galat pada waktu yang berbeda:")
11
Fungsi Autokorelasi dan Fungsi Autokorelasi Parsial proses AR(1) dan MA (1) secara teoritis
Autokorelasi pada proses MA (1) Dengan asumsi bahwa tidak ada autokorelasi pada galat tidak ada korelasi antar galat pada waktu yang berbeda:
 Dengan asumsi bahwa tidak ada autokorelasi pada galat tidak ada korelasi antar galat pada waktu yang berbeda:")
12
Fungsi Autokorelasi dan Fungsi Autokorelasi Parsial proses AR(1) dan MA (1) secara teoritis
Dapat dibuktikan pada time lag yang lebih besar dari 1 berlaku: Sehingga: Setelah dibuat korrelogram berdasarkan fungsi tersebut, maka korrelogram dapat memberikan indikasi bahwa untuk MA(1), autokorelasi hanya punya nilai yang bukan nol sampai dengan time lag 1.
, autokorelasi hanya punya nilai yang bukan nol sampai dengan time lag 1.")
14
Pada proses MA, korrelogram adalah alat yang cukup untuk menentukan ordo proses (q): hanya signifikan sampai dengan lag q. Sedangkan pada proses AR (p), korrelogram hanya menunjukkan sifat autokorelasi yang menurun secara eksponensial seiring waktu, akan tetapi tidak ada indikator ordo proses.
, korrelogram hanya menunjukkan sifat autokorelasi yang menurun secara eksponensial seiring waktu, akan tetapi tidak ada indikator ordo proses.")
15
Autokorelasi parsial adalah korelasi antara
Yt dan Yt-k setelah menghilangkan pengaruh variabel – variabel di antaranya Yt-1, Yt-2, …, Yt-k+1 Menghitung korelasi antara sisaan et =Yt – f(Yt-1, Yt-2, …, Yt- k+1) dan sisaan et-k =Yt-k – f(Yt-1, Yt-2, …, Yt-k+1) PACF proses AR(p), PACF hanya signifikan sampai dengan lag ke p, pada lag selanjutnya bernilai 0 PACF proses MA(q), PACF menurun secara eksponensial
 dan sisaan et-k =Yt-k – f(Yt-1, Yt-2, …, Yt-k+1) PACF proses AR(p), PACF hanya signifikan sampai dengan lag ke p, pada lag selanjutnya bernilai 0. PACF proses MA(q), PACF menurun secara eksponensial.")
16
Cek rumus

17
Model Ciri pola ACF Ciri pola PACF AR (p) Menurun secara eksponesial atau membentuk gelombang sinus Hanya signifikan sampai dengan time lag p, selebihnya bernilai nol MA (q) Signifikan sampai dengan lag q, selebihnya bernilai nol Menurun secara eksponensial atau membentuk gelombang sinus ARMA (p, q) Menurun secara eksponensial
 Signifikan sampai dengan lag q, selebihnya bernilai nol. Menurun secara eksponensial atau membentuk gelombang sinus. ARMA (p, q) Menurun secara eksponensial.")
18
Alasan Perlunya Stasioneritas Pada Model ARIMA
Tujuan pemodelan ARIMA adalah untuk mengidentifikasi dan menduga parameter model yang mendasari terbentuknya data sampel, untuk seluruh periode waktu. Untuk kepentingan peramalan model yang diperoleh saat ini harus berlaku pula untuk periode waktu di masa datang. Jika deret waktu tidak stasioner, maka model yang dibentuk berdasarkan data saat ini tidak akan berlaku pada beberapa periode waktu yang akan datang model tidak valid lagi digunakan untuk peramalan

19
Tahapan Pemodelan ARIMA
Tahap 1. Identifikasi Menentukan nilai p, d, dan q yang tepat Dengan bantuan korrelogram (ACF) dan korrelogram parsial (PACF) Tahap 2. Pendugaan parameter model Pendugaan parameter model AR, atau MA Metode pendugaan: Least square atau MLE Tahap 3. Pemeriksaan diagnostik Untuk memeriksa apakah model terpilih sesuai dengan perilaku data Ada kemungkinan model lain menggambarkan perilaku data secara lebih baik. Model yang sesuai dengan perilaku data akan menghasilkan sisaan dengan sifat white noise. Jika sisaan tidak memiliki sifat tersebut, harus dipilih model yang lain Mempertimbangkan beberapa model tentatif Model terbaik adalah model dengan AIC (atau kriteria lain) terkecil
 dan korrelogram parsial (PACF) Tahap 2. Pendugaan parameter model. Pendugaan parameter model AR, atau MA. Metode pendugaan: Least square atau MLE. Tahap 3. Pemeriksaan diagnostik. Untuk memeriksa apakah model terpilih sesuai dengan perilaku data. Ada kemungkinan model lain menggambarkan perilaku data secara lebih baik. Model yang sesuai dengan perilaku data akan menghasilkan sisaan dengan sifat white noise. Jika sisaan tidak memiliki sifat tersebut, harus dipilih model yang lain. Mempertimbangkan beberapa model tentatif. Model terbaik adalah model dengan AIC (atau kriteria lain) terkecil.")
20
Kriteria-kriteria Tahap 4. Peramalan
Semua menggunakan KTG sebagai penduga ragam dan banyaknya parameter yang diduga (k) Dengan prinsip model yang terbaik adalah yang paling sederhana dengan kesalahan yang paling kecil Model terbaik akan memiliki nilai kriteria terkecil. Tahap 4. Peramalan Pada beberapa kasus model ini lebih menghasilkan peramalan yang lebih terpercaya daripada model – model ekonometrika lainnya, khususnya untuk peramalan jangka pendek.
 Dengan prinsip model yang terbaik adalah yang paling sederhana dengan kesalahan yang paling kecil. Model terbaik akan memiliki nilai kriteria terkecil. Tahap 4. Peramalan. Pada beberapa kasus model ini lebih menghasilkan peramalan yang lebih terpercaya daripada model – model ekonometrika lainnya, khususnya untuk peramalan jangka pendek.")
21
Identifikasi: Plot Deret Waktu GDP US, 1970 Kuartal I – 1991 Kuartal IV

22
Contoh kasus GDP US, digunakan data1970 Kuartal I – Kuartal IV setelah dilakukan pembedaan karena tidak stasioner

23
Identifikasi: Plot Deret Waktu Hasil Pembedaan Pertama GDP US, 1970 Kuartal I – 1991 Kuartal IV

24
Korrelogram dan Fungsi PACF bagi GDP US Hasil Pembedaan Pertama, 1970 Kuartal I – 1991 Kuartal IV

25
Autocorrelation function for d_GDP
LAG ACF PACF Q-stat. [p-value] *** *** [0.003] * [0.002] [0.006] [0.013] [0.027] [0.049] [0.068] *** *** [0.006] [0.009] [0.016] [0.024] ** *** [0.006] [0.006] * [0.002] [0.002] [0.003] [0.005]

26
Pada korrelogram, ACF dan PACF yang digambarkan adalah ACF dan PACF sampel, yang tidak mempunyai pola rapi seperti pada tabel yang menunjukkan ciri – ciri model. Akan tetapi keduanya memiliki pola yang sama, dengan nilai korelasi yang nyata pada lag 1, 8 dan 12 Dapat saja ditentukan model tentatif ARMA, AR maupun MA tanpa melibatkan seluruh time lag, hanya lag 1, 8 dan 12

27
Model Tentatif Bagi GDP US Hasil Pembedaan Pertama
Karena ACF maupun PACF mempunyai bentuk yang serupa (gelombang sinus) dengan nilai autokorelasi maupun autokorelasi spasial yang nyata pada lag 1, 8 dan 12: Model tentatif yang dipilih: Melibatkan suku AR dan MA tapi hanya pada lag 1, 8 dan 12 (Model 1) Melibatkan suku AR pada lag 1, 8 dan 12 (Model 2) Melibatkan suku MA pada lag 1, 8 dan 12 (Model 3)
 dengan nilai autokorelasi maupun autokorelasi spasial yang nyata pada lag 1, 8 dan 12: Model tentatif yang dipilih: Melibatkan suku AR dan MA tapi hanya pada lag 1, 8 dan 12 (Model 1) Melibatkan suku AR pada lag 1, 8 dan 12 (Model 2) Melibatkan suku MA pada lag 1, 8 dan 12 (Model 3)")
28
Hasil Pendugaan Parameter Model 1
coefficient std. error z p-value const e-035 *** phi_ phi_ phi_ theta_ theta_ ** theta_ ** Mean dependent var S.D. dependent var Mean of innovations S.D. of innovations Log-likelihood Akaike criterion Schwarz criterion Hannan-Quinn

29
Hasil Pendugaan Parameter Model 2
coefficient std. error z p-value const e-017 *** phi_ *** phi_ *** phi_ *** Mean dependent var S.D. dependent var Mean of innovations S.D. of innovations Log-likelihood Akaike criterion Schwarz criterion Hannan-Quinn

30
Hasil Pendugaan Parameter Model 3
coefficient std. error z p-value const e-027 *** theta_ *** theta_ *** theta_ *** Mean dependent var S.D. dependent var Mean of innovations S.D. of innovations Log-likelihood Akaike criterion Schwarz criterion Hannan-Quinn

31
Diagnostic Model Memeriksa sisaan di ketiga model apakah sudah memenuhi sifat white noise Uji LB Jika ada beberapa model dengan sisaan yang bersifat white noise, model terbaik dipilih berdasarkan nilai AIC terkecil

32
Uji LB Sisaan Model 1 Autocorrelation function for res1
LAG ACF PACF Q-stat. [p-value] [0.629] [0.381] [0.586] * [0.358] [0.496] [0.596] [0.679] [0.774] [0.846] [0.722] [0.702] [0.775] [0.822] * [0.623] [0.571] [0.603] [0.631]

33
Korrelogram sisaan Model 1

34
Uji LB Sisaan Model 2 Autocorrelation function for res2
LAG ACF PACF Q-stat. [p-value] [0.972] [0.429] [0.633] [0.739] [0.808] [0.892] [0.932] [0.934] [0.941] [0.873] [0.862] [0.893] [0.897] * [0.680] [0.626] [0.616] [0.617]

35
Korrelogram sisaan Model 2

36
Uji LB Sisaan Model 3 Autocorrelation function for res3
LAG ACF PACF Q-stat. [p-value] [0.404] [0.204] [0.365] [0.325] [0.459] [0.548] [0.642] [0.685] [0.761] [0.693] [0.677] [0.712] [0.777] * [0.552] [0.456] [0.486] [0.525]

37
Korrelogram sisaan Model 3

38
Diagnostic Model Ketiganya layak, walaupun pada Model 1 ada paremeter yang tidak signifikan. Kriteria perbandingan untuk memutuskan Model 2 atau Model 3 sebagai model terbaik berdasarkan nilai AIC AIC Model 1: AIC Model 3: Model terbaik adalah model 3

39
Peramalan Harus disesuaikan dengan transformasi yang digunakan.
Dari Model 3, diramalkan pembedaan pertama GDP US pada 1992 kuartal I. Dengan penyesuaian dapat diramalkan GDP pada kuartal I

Presentasi serupa











>")






 Eni Sumarminingsih, SSi, MM.>")
