Download presentation
1
UNIVERSITAS GUNADARMA 2011
NAMA : MARIO NOVIYANTO NPM : FAKULTAS : TEKNOLOGI INDUSTRI JURUSAN : TEKNIK ELEKTRO PEMBIMBING : ~ Dr. Ir. Hartono Siswono, MT ~ Dr. Setiyono, ST., MT UNIVERSITAS GUNADARMA 2011

2
KERETA WISATA TANPA REL
Judul Penulisan : RANCANG BANGUN KERETA WISATA TANPA REL BERBASIS MIKROKONTROLER AT89S51

3
LATAR BELAKANG Pusat perbelanjaan merupakan suatu tempat dimana masyarakat bisa membeli barang kebutuhanya Namun, lambat laun hanya sedikit pusat perbelanjaan yang dirasa nyaman bagi pengunjung. Karena kenyamanan dianggap faktor penting di dalamnya, maka penulis membuat terobosan baru dalam teknologi yaitu merancang kereta wisata tanpa rel yang berbasis mikrokontroler

4
TUJUAN PENULISAN merancang dan merealisasikan sistem kerja kereta wisata yang dapat beroperasi secara otomatis tanpa memerlukan operator di atas kereta tersebut dengan menggunakan cara kerja dari line follower.

5
BATASAN MASALAH Kereta wisata ini dibuat tidak memerlukan bantalan rel berupa besi, sebagai gantinya menggunakan garis hitam yang dimanipulasi sebagai rel ataupun jalur bagi kereta tersebut. Dengan kemampuan untuk dapat menghindar dari garis hitam sebagai pembatas (rel) yang berada di samping maupun depan sensor.
 yang berada di samping maupun depan sensor.")
6
belakang garis garis DEPAN

7
FLOWCHART

8
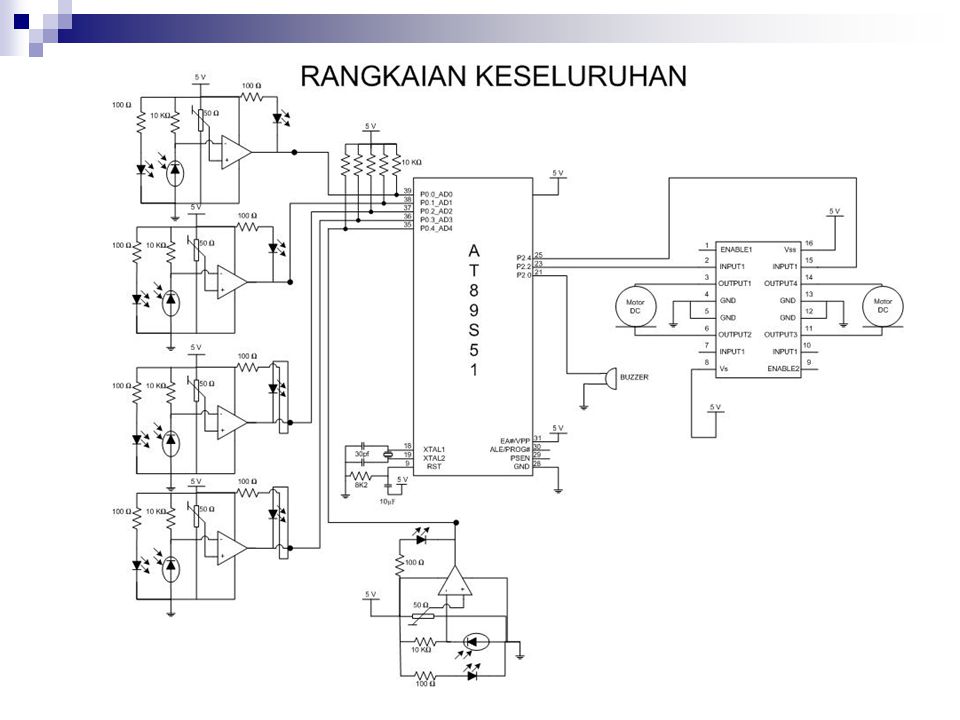
BLOK DIAGRAM

10
KEADAAN KERETA KERETA BERHENTI KERETA MAJU KERETA BERBELOK KE KANAN
KERETA BERBELOK KE KIRI

11
UJI COBA ALAT Pengujian pada Catu Daya Pengujian Sensor Pengujian Mikrokontroller

12
PENGUJIAN CATU DAYA Pengukuran titik A Pengukuran titik B Percobaan
Output ke - 1 9,2 V 2 9,1 V 3 4 5 rata-rata = Percobaan Output ke - 1 5,01 V 2 4,98 V 3 4 5 rata-rata = 4,99 V

13
PENGUJIAN SENSOR

14
Pengukuran SENSOR A SENSOR B SENSOR C SENSOR D SENSOR E Alas Keadaan
Tegangan (V) Alas Keadaan ke- Hitam Putih Terhalang Tidak Terhalang 1 0.39 4.62 0.38 0.37 0.56 2 4.63 0.4 4.64 0.53 3 4.65 4.66 0.52 4 4.67 5 0.41 4.7 4.68 Tegangan 0.38 V 4.64 V 0.39 V 4.65 V 0.53 V rata-rata
 Alas. Keadaan. ke- Hitam. Putih. Terhalang. Tidak Terhalang Tegangan V V V V V. rata-rata.")
15
PENGUJIAN MIKROKONTROLLER

16
Keadaan 1 (kereta berhenti)
Pengukuran Tegangan ke- Sensor A Sensor B Sensor C Sensor D Sensor E 1 4.67 4.67 4.68 4.65 0.51 2 4.71 4.69 4.70 0.52 3 4.72 4.72 0.53 4 4.70 5 4.71 4.70 V 4.70 V 4.69 V 0.52 V rata-rata Pengukuran Tegangan ke- P (2.0) P (2.2) P (2.4) 1 0 0 2 3 4 5 0 V rata-rata
 P (2.2) P (2.4) V. rata-rata.")
17
Keadaan 2 (kereta maju) Pengukuran Tegangan ke- Sensor A Sensor B
Sensor C Sensor D Sensor E 1 4.74 4.73 2 4.72 3 4 5 4.73 V rata-rata Pengukuran Tegangan ke- P (2.0) P (2.2) P (2.4) 1 4.68 4.14 4.16 2 4.65 4.12 4.15 3 4.66 4 4.67 4.13 5 4.66 V 4.13 V 4.16 V rata-rata
 P (2.2) P (2.4) V V V. rata-rata.")
18
Kereta ke kanan A HITAM Pengukuran Tegangan ke- Sensor A Sensor B
Sensor C Sensor D Sensor E 1 0.36 4.70 2 0.37 4.71 3 4.74 4 4.73 4.72 5 0.37 V 4.71 V 4.72 V rata-rata Pengukuran Tegangan ke- P (2.0) P (2.2) P (2.4) 1 4.65 4.14 2 4.13 3 4.68 4.16 4 4.67 4.17 5 4.69 4.67 V 0 V 4.15 V rata-rata
 P (2.2) P (2.4) V. 0 V V. rata-rata.")
19
Kereta ke kanan B HITAM Pengukuran Tegangan ke- Sensor A Sensor B
Sensor C Sensor D Sensor E 1 4.73 0.41 4.74 2 3 0.42 4.76 4 4.77 0.43 5 4.78 4.79 4.75 V 0.42 V 4.76 V rata-rata Pengukuran Tegangan ke- P (2.0) P (2.2) P (2.4) 1 4.68 4.16 2 4.70 4.18 3 4.71 4.19 4 4.72 4.20 5 4.73 4.21 4.71 V 0 V 4.18 V rata-rata
 P (2.2) P (2.4) V. 0 V V. rata-rata.")
20
Kereta ke kanan AB HITAM
Pengukuran Tegangan ke- Sensor A Sensor B Sensor C Sensor D Sensor E 1 0.42 0.46 4.81 4.82 2 0.43 3 4.83 4 5 0.47 4.84 0.43 V 0.46 V 4.82 V 4.83 V rata-rata Pengukuran Tegangan ke- P (2.0) P (2.2) P (2.4) 1 4.77 4.25 2 4.18 3 4.78 4.26 4 5 4.78 V 0 V 4.24 V rata-rata
 P (2.2) P (2.4) V. 0 V V. rata-rata.")
21
Kereta ke kiri C HITAM Pengukuran Tegangan ke- Sensor A Sensor B
Sensor C Sensor D Sensor E 1 4.81 4.84 0.43 4.83 2 4.85 0.45 3 4 4.86 5 0.38 4.84 V 4.85 V 0.43 V rata-rata Pengukuran Tegangan ke- P (2.0) P (2.2) P (2.4) 1 4.72 4.24 2 4.80 4.26 3 4.81 4.27 4 5 4.78 V 4.26 V 0 V rata-rata
 P (2.2) P (2.4) V V. 0 V. rata-rata.")
22
Kereta ke kiri D HITAM Pengukuran Tegangan ke- Sensor A Sensor B
Sensor C Sensor D Sensor E 1 4.86 0.45 2 4.87 0.47 3 0.46 4 5 4.87 V 0.46 V rata-rata Pengukuran Tegangan ke- P (2.0) P (2.2) P (2.4) 1 4.81 4.27 2 3 4 4.82 5 4.81 V 4.27 V 0 V rata-rata
 P (2.2) P (2.4) V V. 0 V. rata-rata.")
23
Kereta ke kiri CD HITAM Pengukuran Tegangan ke- Sensor A Sensor B
Sensor C Sensor D Sensor E 1 4.87 0.47 0.48 2 4.80 0.45 4.84 3 4.86 4 5 4.85 V 0.47 V 4.86 V rata-rata Pengukuran Tegangan ke- P (2.0) P (2.2) P (2.4) 1 4.82 4.27 2 4.80 4.25 3 4.81 4 5 4.81 V 4.26 V 0 V rata-rata
 P (2.2) P (2.4) V V. 0 V. rata-rata.")
24
KESIMPULAN Kereta wisata ini tidak memerlukan operator dalam pengoperasiannya, namun hanya menggunakan mikrokontroler AT89S51 sebagai pengganti operator yang menggerakan kereta wisata ini berjalan secara otomatis Kereta wisata ini menggunakan prinsip kerja dari line follower dengan menggunakan sensor dari LED serta Photodioda sebagai sensor pembaca garis antara hitam dan putih agar mempermudah teknis pembuatan karena bentuknya yang praktis jadi tidak membutuhkan selubung sehingga sensor ini lebih presisi. Kereta wisata ini terdapat 2 motor DC, di sebelah kanan dan di sebelah kiri sebagai penggerak roda. Cara kerja dari kedua motor tersebut jika kereta berbelok ke kanan, maka roda sebelah kiri akan berputar sedangkan roda sebelah kanan akan berhenti. Jika kereta berbelok kiri, maka roda sebelah kanan akan berputar sedangkan roda sebelah kanan akan berhenti

25
SARAN Kereta wisata ini adalah salah satu contoh pengimplementasian prinsip line follower dalam kehidupan sehari-hari. Prinsip dari line follower ini dapat dikembangkan lagi agar dapat diimplementasikan kembali, sebagai contoh dijadikan alat pengantar makanan otomatis, trolley otomatis, dll.