Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
BIOMEKANIK INTRODUKSI Pertemuan ke 1
Oleh : Sugijanto Disampaikan pada kuliah reguler Biomekanik

2
TUJUAN INSTRUKSIONAL Mahasiswa memahami kinesiologi dan biomekanik dengan cara : Mampu mendefinisikan kinesiologi dan biomekanik Mampu merinci tentang proses asuhan manualterapi anggota gerak atas Mampu menghubungkan anatomi terapan dalam kajian histologis struktur jaringan spesifik dengan fungsi anggota gerak atas Mampu menilai tentang proses asuhan manualterapi

3
Pertanyaan studi Jelaskan pengertian kinesiologi dan biomekanik.
Jelaskan proses asuhan Apa yang harus dipelajari dalam kinesiologi dan biomekanik? Jelaskan. Jelaskan tentang struktur jaringan spesifik: kapsuloligamenter, muskulotendinogen, neurologis, diskus intervertebralis, osteogen dan integumen. Jelaskan tentang patologi inflamasi dan proses penyembuhan luka. Jelaskan tentang patologi inaktifitas dan immobilisasi dan komplikasinya pd jaringan spesifik. Jelaskan konsep posisi dan sikap tubuh. Jelaskan konsep gerak tubuh dan anggota

4
Definisi Kinesiologi: Biomekanik yang diterapkan pada system hidup manusia, yaitu neuromuscular arthrogen system, dipelajari sebagai Kinesiologi Biomekanik adalah studi tentang struktur dan fungsi biologis melalui metoda mekanika, yaitu gaya dan pengaruhnya.

5
biomekanik Biokinetika : mempelajari bagaimana system tubuh bergerak tanpa memperhitungkan penyebabnya. Biostatika : mempelajari sistem biologis dlm keadaan diam dgn mempelajari gaya yg menimbulkan keseimbangan. Misal ketika berdiri, berbaring, duduk dll. Biodinamika : Studi tentang gerak biologis hubungannya antara pusat masa dan gaya penyebabnya. Karena kompleksnya bentuk masa tubuh dimana bila diuraikan menimbulkan gejala yang sangat kompleks, maka dalam dibuat model penyederhanaan (cybernetica).
.")
6
Kinematika. Kinematika mempelajari gerak tanpa memperhitungkan penyebabnya. Gerak lurus. Gerak satu titik dengan suatu kecepatan (v) pada jarak (s) tertentu dibagi waktu yang dibutuhkan. s V= m/s t v m/s
 pada jarak (s) tertentu dibagi waktu yang dibutuhkan. s. V= m/s. t. v m/s.")
7
Percepatan/aselerasi (a+) perlambatan/deselerasi (a-), merupakan perubahan kecepatan, dengan rumus v
a = m/s2 t

8
Pada jarak (s) dari suatu lengkung dengan radius (r) dengan rumus
Gerak putar S = r. Pada jarak (s) dari suatu lengkung dengan radius (r) dengan rumus
 dari suatu lengkung dengan radius (r) dengan rumus. ")
9
Gerak lengkung Gabungan gerak putar dan lurus Jumlah derajat kebebasan

10
Statika Mempelajari system dalam keadaan diam
Keseimbangan gaya statis

11
Keseimbangan gaya-momen statis
Momen dari kuat (moment force)
")
12
Gaya kontak pada permukaan sendi
Grafik terhadap kesimbangan gaya dan momen

13
Permukaan sendi berbentuk bulat
Sedikit terbatas pada gerak menekuk, sangat mudah diputar. Terbatas gaya melintang, gaya menekuk terjadi oleh gaya melintang.

14
Permukaan sendi berbentuk datar
Gaya melintang besar, sedikit putaran, gaya menekuk terbatas. Mobilisasi dlm gaya melintang dekat dengan permukaan sendi

15
Mobilisasi

16
Keseimbangan statis seluruh tubuh dan bagian tubuh
Gambar gaya yg terjadi pada tubuh dlm keseimbangan

17
Dinamika

18
Translasi (gerak geser)
")
19
Rotasi

20
Translasi dan rotasi

21
Pusat gravitasi Konsep titik pusat gavitasi (berat badan) digunakan untuk menjelaskan dan meng analisis gerak mekanis tubuh manusia dan obyek lain. Titik Pusat Berat adalah titik konsentrasi berat masa dimana terdapat keseimbangan masa tsb. Pusat gravitasi tubuh letaknya bervariasi tergantung posisi tubuh, beban tambahan dan gerak tubuh dan/atau anggota tubuh. Pada posisi berdiri tegak terletak ditengah pelvis depan vert. S2 (Hellenbrndt et al 1938), tetapi masih tegantung bentuk dan proporsi tubuh. Pada posisi membungkuk terletak depan tubuh. Ketika mengangkat lengan atau membawa beban berada diatas titik normalnya. Saat berjalan akan bergeser ke kanan-kiri.
 digunakan untuk menjelaskan dan meng analisis gerak mekanis tubuh manusia dan obyek lain. Titik Pusat Berat adalah titik konsentrasi berat masa dimana terdapat keseimbangan masa tsb. Pusat gravitasi tubuh letaknya bervariasi tergantung posisi tubuh, beban tambahan dan gerak tubuh dan/atau anggota tubuh. Pada posisi berdiri tegak terletak ditengah pelvis depan vert. S2 (Hellenbrndt et al 1938), tetapi masih tegantung bentuk dan proporsi tubuh. Pada posisi membungkuk terletak depan tubuh. Ketika mengangkat lengan atau membawa beban berada diatas titik normalnya. Saat berjalan akan bergeser ke kanan-kiri.")
22
Garis berat dan dasar tumpu
Garis berat tubuh secara imaginer terletak pada potongan tengah tubuh antara kanan-kiri dan depan-belakang. Dasar tumpu adalah daerah bawah tubuh yang dibentuk dari garis kontinyu hubungan semua titik kontak tubuh dengan tanah (dasar). Pada posisi berdiri serupa bentuk trapezium yang dibentuk garis sisi-sisi luar kaki, garis penghubung ujung-ujung jari dan garis ujung kedua tumit.
. Pada posisi berdiri serupa bentuk trapezium yang dibentuk garis sisi-sisi luar kaki, garis penghubung ujung-ujung jari dan garis ujung kedua tumit.")
23
BIOMEKANIKA JARINGAN DAN STRUKTUR SISTEM SKELETAL
Biomekanik tulang dan jaringan tulang

24
Biomekanik tulang rawan sendi

25
Biomekanik jaringan ikat collagen

26
KINESIOLOGI DAN BIOMEKANIKA PERSENDIAN
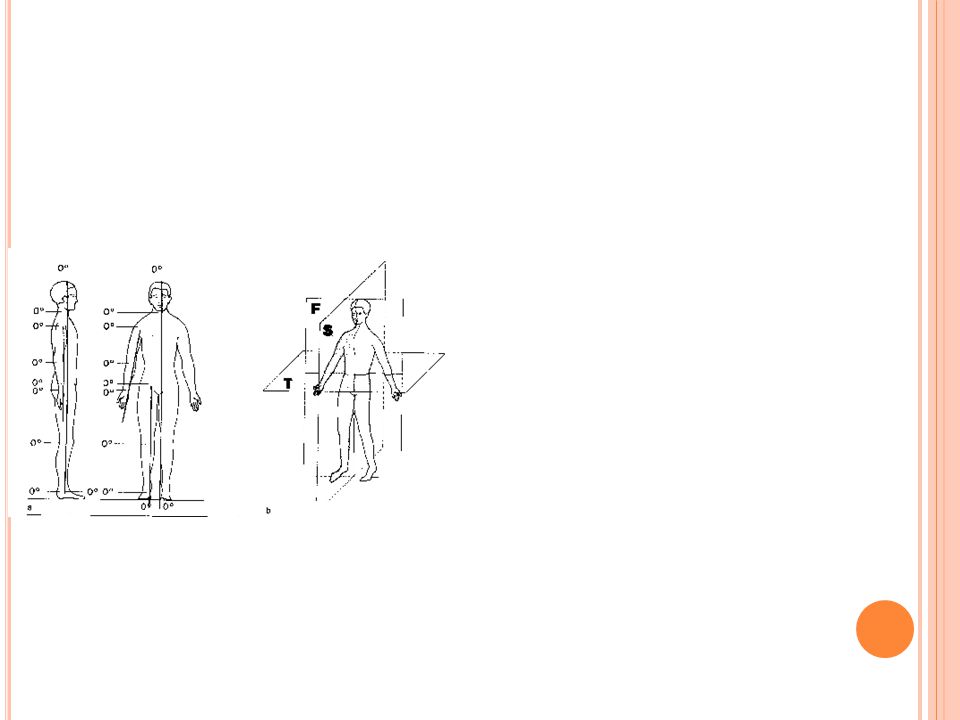
4.1. BIDANG GERAK Bidang gerak tubuh terdiri dar tiga bidang. Bidang yang memotong tubuh dari sisi kanan-kiri sebagai bidang frontal. Bidang yang memotong tubuh dari depan-belakang sebagai bidang frontal. Bidang yang memotong tubuh secara horizontal dari depan-belakang sebagai bidang transversal.

28
4.2. GERAK FISIOLOGIS SENDI SINOVIALIS
Gerak dalam bidang frontal misalnya abduksi-adduksi, elevasi-depresi. Gerak dalam bidang sagital misalnya fleksi – ekstensi, dorsal fleksi-plantar fleksi. Gerak dalam bidang transversal misalnya rotasi eksternal-rotasi interna Gabungan ketiganya sebagai sirkumduksi.

29
BENTUK SENDI SINOVIALIS
Dalam penyederhanaan bentuk sendi dipilahkan dalam 6 bentuk, sendi engsel (hinge joint), sendi elipsoida (ovoid joint), sendi putar (rotatory joint), sendi datar (flat joint) sendi pelana (saddle joint), dan sendi peluru (ball and socket joint).
, sendi elipsoida (ovoid joint), sendi putar (rotatory joint), sendi datar (flat joint) sendi. pelana (saddle joint), dan sendi. peluru (ball and socket joint).")
30
Sendi engsel Memiliki satu derajad kebebasan gerak rotasi ayun
Sendi engsel Memiliki satu derajad kebebasan gerak rotasi ayun. Contoh humero ulnar joint, tibio femoral joint, Interphalangeal joint

31
Sendi ovoid memiliki satu derajad kebebasan gerak utama rotasi ayun
Sendi ovoid memiliki satu derajad kebebasan gerak utama rotasi ayun. Contoh wrist joint.

32
Sendi putar memiliki satu derajad kebebasan gerak rotasi putar
Sendi putar memiliki satu derajad kebebasan gerak rotasi putar. Contoh radioulnar joint.

33
Sendi peluru memiliki satu derajad kebebasan gerak rotasi ayun, satu derajad rotasi putar dan satu derajad rotasi sp

34
Sendi pelana memiliki dua derajad kebebasan gerak rotasi ayun
Sendi pelana memiliki dua derajad kebebasan gerak rotasi ayun. Contoh sternoclavicular joint dan carpometacarpal I.

35
OSTEOKINEMATIC Osteokinematik adalah gerak sendi hanya dilihat dari gerak tulangnya saja. Pada osteokinematik dikenal gerak rotasi ayun, rotasi putar dan rotasi spin.

36
RANGE OF MOTION (ROM) ROM atau Lingkup Gerak Sendi adalah lingkup yang dicapai pada gerak sendi dalam bidang gerak dan sumbu gerak tertentu. Pembatasan ROM normal dapat oleh peregangan jaringan lunak capsule ligamentair, terganjal oleh jaringan lunak, atau oleh pembatasan tulang.

37
Pengukuran ROM dengan menggunakan goniometer universal atau khusus dalam derajad, tetapi pada sendi/bidang gerak tertentu dapat diukur dengan tape measurer dalam centi meter. Pengukuran ROM aktif yang diukur ketika dilakukan gerak aktif, disini pembatasan juga ditentukan oleh kekuatan otot yang bersangkutan.

38
End feel Rasa akhir ROM pada pengukuran ROM pasif disebut end feel, merupakan rasa yang timbul dari pembatasan gerak tersebut. End feel normal sebagai standard meliputi: Soft end feel: terganjal oleh jaringan lunak. Contoh fleksi siku. Elastic end feel: peregangan jaringan lunak capsule ligamentai. Contoh rotasi internal/eksternal sendi bahu. Hard end feel: pembatasan tulang. Contoh ekstensi siku. End feel patologis meliputi: Empty end feel: gerak melebihi ROM normal seolah tanpa penghambat. Contoh pada dilokasi sendi. Springy end feel: pembatasan oleh ketegangan otot. Contoh fleksi panggul pada posisi lutut lurus. Firm harder end feel: pembatasan oleh kapsul-ligamen memendek. Contoh rotasi eksternal pada frozen shoulder.

39
ARTHROKINEMATIC Pada tiap gerak fisiologi selalu terdapat unsur gerak osteokinematic dan arthrokinematic. Gerak arthrokinematic adalah gerak dilihat dari gerak antar permukaan sendinya, sehingga dikenal sebagai gerak intraarticular. Terdiri dari traksi-kompresi, translasi, dan spin. Dalam gerak fungsional disamping gerak disamping terjadi gerak tulangnya, juga terdapat gerak intra artikular dua atau tiga komponen tersebut.

40
Traksi-kompresi Adalah gerak satu permukaan sendi tegak lurus terhadap permukaan sendi pasangannya kearah menjauh-mendekat.

41
Translasi Adalah gerak satu permukaan sendi sejajar terhadap permukaan sendi pasangannya

42
Spin Adalah gerak putar sesuai sumbu tulang terhadap permukaan sendi pasangannya.

Presentasi serupa