Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
IMPLEMENTASI ALGORITMA PARTICLE SWARM OPTIMIZATION (PSO)
UNTUK PENENTUAN POSISI STRATEGIS AGENT PADA SIMULASI ROBOT SEPAK BOLA DUA DIMENSI Galih Hermawan Sidang Tesis Program Magister Teknik Elektro STEI ITB 14 Juni 2011

2
Outline |Materi Presentasi
Pendahuluan Latar Belakang Tujuan Batasan Masalah Rumusan Masalah Tinjauan Pustaka Robot Sepak Bola Particle Swarm Optimization RoboCup UvA Trilearn Rosemary Analisis dan Desain Spesifikasi Sistem Posisi Strategis UvA Trilearn Mekanisme Seleksi Aksi Rosemary Kebutuhan Desain Agent Positioning Desain Mekanisme Seleksi Aksi Implementasi dan Pengujian Implementasi PSO Pengujian Hasil Pertandingan Klasemen dan Grafik Kesimpulan dan Saran Kesimpulan Saran Demo Outline |Materi Presentasi

3
Bab I |Pendahuluan Latar Belakang Swarm Robotics
kerja sama koordinasi negosiasi RoboCup robosoccer simulasi robosoccer 2d Agent Positioning particle swarm optimization mekanisme seleksi aksi 1 2 3 4

4
Bab I |Pendahuluan Tujuan
Membantu menentukan posisi strategis agent saat situasi menyerang untuk memperbesar peluang agent dalam mencetak gol ke gawang lawan. Dalam situasi bertahan, agent dapat menentukan posisi strategis untuk mempertahankan gawangnya agar tidak kemasukan gol. 1 2 3 4

5
Bab I |Pendahuluan Batasan Masalah Simulator RoboCup Soccer Server:
server versi , monitor versi , dan logplayer versi Client (base code): UvA Trilearn. tim rosemary tim karakterisasi PSO diterapkan pada agent yang tidak sedang membawa bola. ofensif semi defensif 1 2 3 3 4
: UvA Trilearn. tim rosemary. tim karakterisasi. PSO diterapkan pada agent yang tidak sedang membawa bola. ofensif. semi defensif")
6
Bab I |Pendahuluan Rumusan Masalah
Implementasi PSO untuk agent positioning pada tim Rosemary. Integrasi PSO pada tim karakterisasi. 1 2 3 4 4

7
Bab II |Tinjauan Pustaka
Robot Sepak Bola 1 Robot bermain sepak bola. Menghibur dan menyenangkan, MAS, Machine Learning, Real Time Planning. 2 3 4 5

8
Bab II|Robot Sepak Bola – Simulasi

9
Bab II|Robot Sepak Bola – Ukuran Mini

10
Bab II|Robot Sepak Bola - Humanoid

11
Bab II|Robot Sepak Bola – Wheel Chair

12
Bab II |Tinjauan Pustaka
Particle Swarm Optimization 1 2 3 4 5

13
Bab II|PSO - Formula Velocity (persamaan 2.3) [implementasi]
Posisi (persamaan 2.2)
![Bab II|PSO - Formula Velocity (persamaan 2.3) [implementasi]](http://slideplayer.info/slide/3081712/11/images/13/Bab+II%7CPSO+-+Formula+Velocity+%28persamaan+2.3%29+%5Bimplementasi%5D.jpg "Posisi (persamaan 2.2)")
14
Bab II |Tinjauan Pustaka
RoboCupTM 1 Kompetisi. RoboCup Soccer, RoboCup Rescue, RoboCup Junior. 2 3 4 5

15
Bab II |Tinjauan Pustaka
RoboCupTM Soccer 1 Kategori. Liga Simulasi, Liga Robot Ukuran Kecil, Liga Robot Ukuran Sedang, Liga Humanoid, Liga Platform Standar. 2 3 4 5

16
Bab II |Tinjauan Pustaka
Simulator 1 2 Client System Soccer Server System Soccer Monitor System Informasi-informasi sensorial Soccer Server Agent(s) Action Commands Informasi-informasi lapangan Soccer Server 3 4 5
 Action Commands. Informasi-informasi lapangan Soccer Server")
17
Bab II |Tinjauan Pustaka
Pemodelan Obyek Lapangan 1 2 3 4 5

18
Bab II |Tinjauan Pustaka
UvA Trilearn 1 2 3 4 5

19
Bab II |Tinjauan Pustaka
1 2 3 4 5

20
Bab II |Tinjauan Pustaka
Rosemary 1 2 3 4 5

21
Bab III |Analisis dan Desain
Spesifikasi Sistem 1 Ofensif – penerapan PSO untuk agents positioning agar memperbesar peluang mencetak gol. Defensif – bergerak cepat dan strategis ke wilayah pertahanan. 2 3 4 5 6

22
Bab III |Analisis dan Desain
Formasi dan Posisi Strategis Pada UvA Trilearn 1 2 Formasi 3 4 5 6

23
Get Strategic Position
Bab III |Analisis dan Desain Formasi dan Posisi Strategis Pada UvA Trilearn 1 2 Posisi Strategis Get Strategic Position attr_x attr_y max_x max_y BehindBall qx, qy (ball position) Koordinat Strategis Agen: Sx, Sy 3 4 5 6
 Koordinat Strategis Agen: Sx, Sy")
24
Bab III |Analisis dan Desain
Mekanisme Seleksi Aksi Rosemary 1 2 Kecakapan Agents 3 4 5 6

25
Bab III |Analisis dan Desain
Mekanisme Seleksi Aksi Rosemary 1 2 Pembagian area lapangan. 3 4 5 6

26
Bab III |Analisis dan Desain
Mekanisme Seleksi Aksi Rosemary 1 2 Algoritma. if bola berada di area 5a atau 5b then if lawan tidak ada di sekitar agen then oper bola ke teammate yang sedang bebas pada area 4, 5 atau 6. else if bola berada di luar area penalti dan jalur menuju gawang tidak ditutup oleh lawan then giring bola ke arah pinggir area penalti. else tendang bola ke arah gawang dengan daya maksimal. if bola berada di area 6 then else tendang bola ke arah salah satu sudut gawang dengan daya maksimal. 3 4 5 6

27
Bab III |Analisis dan Desain
Kebutuhan 1 2 Perangkat Keras. Prosesor: 700 MHz x86, memori: 512 Mb. Harddisk, dengan rincian: ruang untuk sistem operasi 4 Gb dan untuk simulator dan libraries sekitar 200 Mb. Partisi khusus swap diperlukan secukupnya jika ukuran memori agak rendah. Kartu grafik dan monitor dengan kemampuan 1024x768 piksel. CD/DVD drive (untuk instalasi dari perangkat tersebut). Koneksi internet (jika diperlukan instalasi libraries via repositori). . 3 4 5 6
. Koneksi internet (jika diperlukan instalasi libraries via repositori)")
28
Bab III |Analisis dan Desain
Kebutuhan 1 2 Perangkat Lunak. Sistem operasi: Linux atau Microsoft Windows XP/NT/Vista/Seven. Perangkat lunak simulator RoboCupTM, meliputi: Soccer Server, Soccer Log, dan Soccer Monitor. UvA Trilearn base code[15] atau binaries tim lain, misalnya peserta kompetisi RoboCup tahun 2009[18] dan 2010[19]. Libraries tambahan yang diperlukan jika instalasi simulator dilakukan di sistem operasi berbasis Linux, seperti: build-essential, libtool, libboost-dev, libboost-filesystem-dev, flex, bison, libx11-dev, libxpm-dev, libqt-dev, qt4-dev-tools, dan libglib2.0. 3 4 5 6

29
Bab III |Analisis dan Desain
Desain Agent Positioning 1 2 Algoritma. Bangkitkan posisi inisial swarm secara acak Repeat For setiap partikel i do If f(xi) < f(pi) Then pi xi pg = min(pkeseluruhan) Update velocity (lihat persamaan 2.3) Update posisi (lihat persamaan 2.2) End For Until kriteria pemutusan tercapai 3 4 5 6
 < f(pi) Then pi xi. pg = min(pkeseluruhan) Update velocity (lihat persamaan 2.3) Update posisi (lihat persamaan 2.2) End For. Until kriteria pemutusan tercapai")
30
Bab III |Analisis dan Desain
Desain Agent Positioning 1 Pembagian Area. 2 Tim Lawan Tim Kami Area bertahan Area menyerang 3 4 5 6

31
Bab III |Analisis dan Desain
Desain Agent Positioning 1 Teknik Menyerang. 2 3 4 5 6

32
Bab III |Analisis dan Desain
Desain Agent Positioning 1 Pseudocode Ketika Menyerang. 2 3 4 5 6

33
Bab III |Analisis dan Desain
Desain Agent Positioning 1 Teknik Bertahan. 2 3 4 5 6

34
Bab III |Analisis dan Desain
Desain Agent Positioning 1 Pseudocode Ketika Diserang. 2 3 4 5 6

35
Bab III |Analisis dan Desain
Desain Mekanisme Seleksi Aksi 1 Orisinil Revisi 2 3 4 5 6

36
Bab IV |Implementasi dan Pengujian
Implementasi PSO 1 Penggunaan formula. velocity atau vid merupakan jarak dari sebuah agen atau partikel yang harus ditempuh, pid merupakan posisi agent saat ini dengan nilai evaluasi terbaik yang pernah dimilikinya, pgd merupakan posisi agent saat ini dengan nilai evaluasi terbaik dari seluruh agents di kumpulannya, xid merupakan posisi agent saat ini. 2 3 4

37
Bab IV |Implementasi dan Pengujian
Implementasi PSO 1 Skema. 2 3 4

38
Bab IV |Implementasi dan Pengujian
1 2 3 4
39
Bab IV |Implementasi dan Pengujian
Hasil Pertandingan 1 2 3 4

40
Bab IV |Implementasi dan Pengujian
Klasemen 1 2 3 4

41
Bab IV |Implementasi dan Pengujian
Grafik Poin 1 2 3 4

42
Bab IV |Implementasi dan Pengujian
Grafik Kemenangan 1 2 3 4

43
Bab IV |Implementasi dan Pengujian
Grafik Gol 1 2 3 4

44
Bab V |Kesimpulan dan Saran
1 Penerapan algoritma PSO untuk penentuan posisi agents dalam kondisi menyerang berhasil memperbesar peluang tim untuk mencetak gol ke gawang lawan. Dalam kondisi diserang atau bertahan, pergerakan agents menggunakan algoritma PSO dalam bertahan secara umum berhasil membantu memperkecil peluang tim lawan dalam memasukkan gol. Tim RosemaryPSO dan tim GalihRio memiliki performa lebih baik ketimbang tim tesis sebelumnya Rosemary, hal ini bisa dilihat dari statistik jumlah kemenangan, kekalahan, gol memasukkan, dan gol kemasukan yang didapatkan dalam seluruh pertandingan. Penerapan algoritma PSO secara khusus untuk penentuan posisi agents dalam kondisi bertahan masih belum efektif, terutama jika melawan tim internasional seperti Helios dan Iran. Hal ini disebabkan tim berbasis UvA Trilearn kalah dalam segi basic skill, sehingga revisi hanya dalam hal agent positioning masih kurang efektif. 2

45
Bab V |Kesimpulan dan Saran
Tim yang ingin menggunakan base code berbasis UvA Trilearn sebaiknya fokus pada perbaikan skill dasar dari agent, seperti: dribble, passing, marking, dan sejenisnya. Pengembangan tim RosemaryPSO maupun tim GalihRio selanjutnya adalah di bagian pertahanan, yaitu bagaimana mendesain strategi bertahan yang lebih baik, agar tim lawan seminimal mungkin membuat gol atau membuat peluang terciptanya gol di gawang tim kita. Penggunaan RoboCupTM Soccer Server tidak sekedar sebagai simulator pertandingan saja, tapi juga dapat digunakan untuk alat bantu pembelajaran AI dan MAS bagi peneliti maupun pelajar yang ingin menekuni bidang ini. Tim yang sudah dibuat atau dikembangkan baiknya diikutsertakan dalam kompetisi internasional RoboCupTM, dimana selain sebagai ajang uji coba tim yang sudah dibangun juga dapat dijadikan sebagai media bertukar ilmu dan informasi antar peneliti dan pelajar di bidang ini. Disarankan lebih memperhatikan perkembangan simulator dan mempelajari fitur-fitur yang sudah disediakan agar tidak ketinggalan informasi. Penggunaan base code dari Agent2D memiliki basic skill yang lebih baik dari UvA Trilearn, sehingga perlu adanya penelitian dan pembelajaran khusus pada base code ini. 1 2

46
Terima Kasih DEMO

47
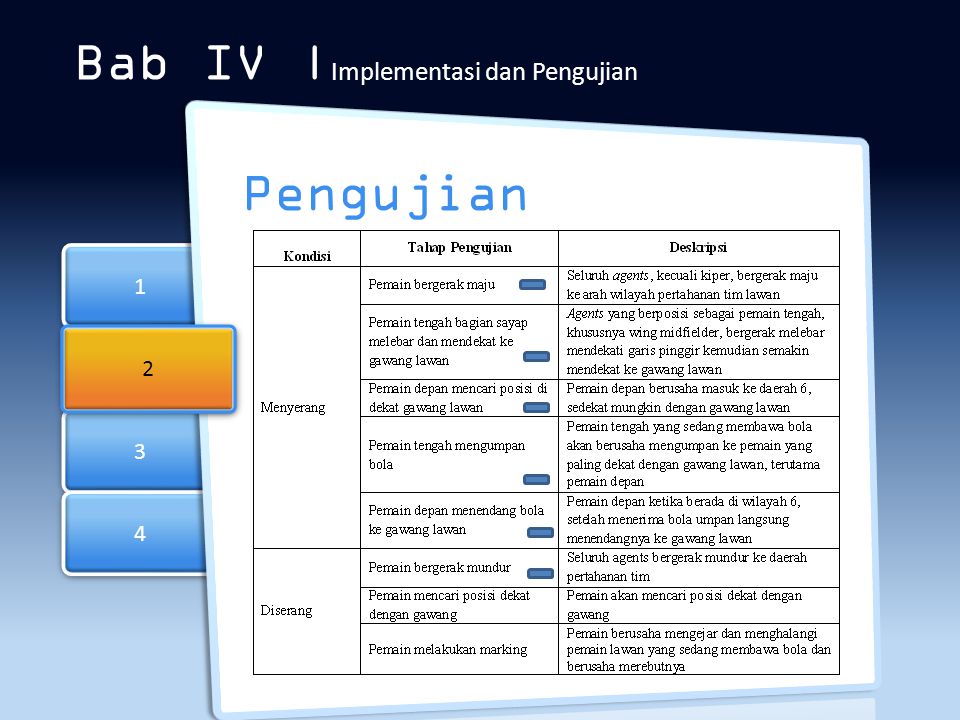
Pengujian 1 |Pemain bergerak maju

48
Pengujian 1 |Pemain bergerak maju

49
Pengujian 1 |Pemain bergerak maju
RENCANA PENGUJIAN

50
Pengujian 2 |Pemain tengah melebar dan menukik

51
Pengujian 2 |Pemain tengah melebar dan menukik

52
Pengujian 2 |Pemain tengah melebar dan menukik

53
Pengujian 2 |Pemain tengah melebar dan menukik

54
Pengujian 2 |Pemain tengah melebar dan menukik

55
Pengujian 2 |Pemain tengah melebar dan menukik

56
Pengujian 2 |Pemain tengah melebar dan menukik
RENCANA PENGUJIAN

57
Pengujian 3 |Pemain depan ke daerah dekat gawang

58
Pengujian 3 |Pemain depan ke daerah dekat gawang

59
Pengujian 3 |Pemain depan ke daerah dekat gawang

60
Pengujian 3 |Pemain depan ke daerah dekat gawang

61
Pengujian 3 |Pemain depan ke daerah dekat gawang

62
Pengujian 3 |Pemain depan ke daerah dekat gawang

63
Pengujian 3 |Pemain depan ke daerah dekat gawang

64
Pengujian 3 |Pemain depan ke daerah dekat gawang

65
Pengujian 3 |Pemain depan ke daerah dekat gawang

66
Pengujian 3 |Pemain depan ke daerah dekat gawang
RENCANA PENGUJIAN

67
Pengujian 4 |Pemain tengah mengumpan bola

68
Pengujian 4 |Pemain tengah mengumpan bola

69
Pengujian 4 |Pemain tengah mengumpan bola

70
Pengujian 4 |Pemain tengah mengumpan bola

71
Pengujian 4 |Pemain tengah mengumpan bola

72
Pengujian 4 |Pemain tengah mengumpan bola

73
Pengujian 4 |Pemain tengah mengumpan bola

74
Pengujian 4 |Pemain tengah mengumpan bola

75
Pengujian 4 |Pemain tengah mengumpan bola

76
Pengujian 4 |Pemain tengah mengumpan bola
RENCANA PENGUJIAN

77
Pengujian 5 |Pemain depan menendang bola

78
Pengujian 5 |Pemain depan menendang bola

79
Pengujian 5 |Pemain depan menendang bola

80
Pengujian 5 |Pemain depan menendang bola

81
Pengujian 5 |Pemain depan menendang bola

82
Pengujian 5 |Pemain depan menendang bola

83
Pengujian 5 |Pemain depan menendang bola

84
Pengujian 5 |Pemain depan menendang bola

85
Pengujian 5 |Pemain depan menendang bola

86
Pengujian 5 |Pemain depan menendang bola

87
Pengujian 5 |Pemain depan menendang bola

88
Pengujian 5 |Pemain depan menendang bola

89
Pengujian 5 |Pemain depan menendang bola
RENCANA PENGUJIAN

90
Pengujian 6 |Pemain mundur

91
Pengujian 6 |Pemain mundur

92
Pengujian 6 |Pemain mundur

93
Pengujian 6 |Pemain mundur

94
Pengujian 6 |Pemain mundur

95
Pengujian 6 |Pemain mundur

96
Pengujian 6 |Pemain mundur

97
Pengujian 6 |Pemain mundur

98
Pengujian 6 |Pemain mundur

99
Pengujian 6 |Pemain mundur

100
Pengujian 6 |Pemain mundur
RENCANA PENGUJIAN

Presentasi serupa



>")

 dan command line interface (CLI) Menjelaskan langkah instalasi sistem operasi.>")
>")












