Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
MOST (MAYNARD OPERATION SEQUENCE TECHNIQUE)
")
2
MOST adalah salah satu teknik pengukuran kerja yang disusun berdasarkan urutan sub-sub aktivitas.
Konsep MOST berdasarkan perpindahan obyek, karena pada dasarnya kerja itu adalah memindahkan obyek. Misalnya mengangkat, mengeser, membawa, dll, kecuali berpikir. Satuan waktu yang digunakan : TMU (Time Measurement Unit), dimana: 1 TMU = jam = 0,0006 menit = 0,036 detik Nilai waktu yang ditunjukkan oleh MOST merupakan waktu normal
, dimana: 1 TMU = jam = 0,0006 menit = 0,036 detik. Nilai waktu yang ditunjukkan oleh MOST merupakan waktu normal.")
3
MOST memiliki 2 model, yaitu:
Model-model urutan dasar (The Basic Sequence Models) Model urutan penanganan peralatan ( The Equipment Handling Sequence Models)
 Model urutan penanganan peralatan ( The Equipment Handling Sequence Models)")
4
I.Model-model urutan dasar (The Basic Sequence Models)
The General Move Sequence (Urutan Gerakan Umum) The Controlled Move Sequence (Urutan Gerakan Terkendali) The Tool Use Sequence (Urutan Pemakaian Peralatan)
 The Controlled Move Sequence (Urutan Gerakan Terkendali) The Tool Use Sequence (Urutan Pemakaian Peralatan)")
5
1.1 Urutan Gerakan Umum Model ini dipakai bila terjadi perpindahan obyek dengan bebas, obyek berpindah tanpa hambatan, dibawah kendali manusia. Contoh, sebuah obyek (benda) dipindahkan dari tempat satu ke tempat lainnya. Karakteristik model ini dapat dilihat pada urutan sub aktivitas sebagai berikut: Menjangkau obyek dengan satu atau dua tangan pada jarak tertentu. Mengendalikan obyek dengan tangan (tanpa alat) Memindahkan obyek dalam jarak tertentu ke tempat yang dituju. Menempatkan obyek Kembali ke tempat semula.
 dipindahkan dari tempat satu ke tempat lainnya. Karakteristik model ini dapat dilihat pada urutan sub aktivitas sebagai berikut: Menjangkau obyek dengan satu atau dua tangan pada jarak tertentu. Mengendalikan obyek dengan tangan (tanpa alat) Memindahkan obyek dalam jarak tertentu ke tempat yang dituju. Menempatkan obyek. Kembali ke tempat semula.")
6
Urutan Gerakan Umum... Model Urutan Gerakan Umum A B G A B P A
Perpindahan obyek ini dapat dibagi menjadi 3 bagian, yaitu : A B G A B P A (memperoleh) (meletakkan) (kembali)
 (meletakkan) (kembali)")
7
Keterangan : A – Action ( Jarak yang ditempuh untuk melakukan tindakan) B – Body Motion ( Gerakan badan) G - Gain Control (Pengendalian) P – Place (Menempatkan)
 P – Place (Menempatkan)")
8
Pengulangan Jika ada pengulangan atau proses yang sama yang dilakukan maka digunakan tanda kurung pada aksi tersebut dan penambahan tanda kurung yang isinya frekuensi pengulangan. Jumlah indeks adalah dengan menjumlahkan indeks parameter di luar tanda kurung, ditambah perkalian frekuensi pengulangan dengan jumlah indeks dalam tanda kurung.

9
The general move sequence
ABGABPA General Move Index A B G P action distance body motion gain control place <5 cm no body motion no gain control, hold No placement 1 within reach light object lay aside loose fit 3 1-2 steps bend and arise, 50% occurance heavy or bulky disengage interlocked collect Adjustments light pressure double 6 3-4 steps bend and arise care of precision heavy pressure blind or obstructed intermediate moves 16 8-10 steps through door climb

10
The general move sequence
Dengan melihat tabel sebelumnya maka urutan kegiatan umum yang terjadi adalah : A6 = berjalan 3-4 langkah menuju lokasi B6 = bungkuk dan bangkit G1 = pengendalian pada sebuah objek ringan A1 = memindahkan objek sejauh jangkauan tangan B0 = tanpa gerakan badan P3 = menempatkan dan menyesuaikan objek A0 = tanpa pengembalian ketempat semula

11
Contoh : Mengambil obyek ke kotak komponen dan meletakkan ke dekat badan. Maka urutan model adalah : Memperoleh Meletakkan Kembali A B G A B P A A1B0G A1B0P A0 Atau A1B0G1A1B0P1A0 TMU : ( ) x 10 = 40 TMU
 x 10 = 40 TMU.")
12
Soal Soal : Mengambil segenggam mur dan menempatkannya pada 6 buah skrup yang ditempatkan sejauh 12 cm

13
Jawaban A1 B0 G3 (A1 B0 P3) A0 (6) A1 menjangkau mur
B0 tidak melakukan gerakan tubuh G3 mengumpulkan beberapa benda kerja A1 masih dalam jangkauan B0 tanpa gerakan badan P3 perlunya penyesuaian A0 Posisi tangan tidak kembali ke posisi awal

14
Soal Soal : Operator mesin yang mengambil benda kerja dan meletakkannya pada pallet. Misalkan operator berdiri langsung di depan benda kerja. Benda kerja tersebut ringan dan lokasi pallet terletak dilantai sejauh 10 langkah dari tempat dia bekerja. Hint : gerakan dasar ABG (mengambil) ABP (menyimpan) A (kembali)
 ABP (menyimpan) A (kembali)")
15
JAWABAN A1 B0 G1 A16 B6 P1 A16 A1 = benda dalam jangkauan tangan
B0 = dalam menjangkau tidak ada gerakan badan G1 = pengendalian pada sebuah objek ringan A16 = memindahkan objek sejauh 10 langkah B6 = bend and arise P1 = “lay aside” ditempatkan begitu saja A16 = operator kembali ketempat awal

16
1.2 Urutan Gerakan Terkendali
Model ini menggambarkan perpindahan obyek secara manual 'dikendalikan' oleh satu jalur. Urutan sub aktivitas model ini adalah: Menjangkau obyek dengan satu atau dua tangan pada jarak tertentu Mengendalikan obyek tanpa alat Memindahkan obyek dalam keadaan terkendali Waktu untuk memproses obyek jika ada Mengatur obyek yang diikuti dengan gerakan terkendali atau akhir dari proses Kembali ke tempat kerja.

17
Model Urutan Gerakan Terkendali:
A B G M X I A Atau dapat dibagi menjadi 3 bagian A B G M X I A (memperoleh) (memindahkan) (Kembali) M (Gerakan Terkendali) X (Waktu Proses) I (Penyesuaian)
 (memindahkan) (Kembali) M (Gerakan Terkendali) X (Waktu Proses) I (Penyesuaian)")
18
The controlled move sequence
M meliputi semua gerakan yang diatur secara manual atau tindakan/gerakan objek melalui langkah yang dikendalikan. X menunjukkan waktu proses, yang dilakukan oleh mesin dan bukan oleh tangan. I gerak meluruskan, yang menunjukkan gerakan manual yang mengikuti gerakan terkendali atau pada akhir waktu pemrosesan untuk mencapai pelurusan objek.

19
Gerakan terkendali Gerakan terkendali terjadi karena dua keadaan :
Objek dikendalikan karena kaitannya dengan objek lain, seperti memijit tombol, membuka pintu, memutar tuas. Objek dikendalikan karena adanya kontak terhadap permukaan objek lain, misalnya mendorong kotak diatas meja.

20
Contoh: Menekan obyek sejauh jangkauan tangan selama 0,5 detik
Maka urutan model adalah Memperoleh Memindahkan Kembali A B G M X I A A1B0G M1X1I A0 Atau A1B0G1M1X1I1A0 TMU : ( ) x 10 = 50 TMU
 x 10 = 50 TMU.")
21
1.3 Urutan Pemakain Peralatan
Model ini dikembangkan dari model urutan gerakan umum dengan tambahan parameter-parameter tertentu dengan proses mental. Urutan sub aktivitas model ini adalah: Menjangkau obyek Menempatkan obyek atau alat Memakai alat Melepaskan alat atau obyek Kembali ke tempat kerja

22
Model Urutan Gerakan Terkendali: A B G A B P A B G A
Atau dapat dibagi menjadi 3 bagian A B G A B P * A B G A (memperoleh) (menempatkan) (memakai) (melepas) (kembali) Ruang kosong (*) F Fasten (mengencangkan) L Loosen (melonggarkan) C Cut (memotong) S Surface Treat M Measure (mengukur) R Record (mencatat) T Think (berpikir)
 (menempatkan) (memakai) (melepas) (kembali) Ruang kosong (*) F Fasten (mengencangkan) L Loosen (melonggarkan) C Cut (memotong) S Surface Treat. M Measure (mengukur) R Record (mencatat) T Think (berpikir)")
23
Contoh : Merakit obyek satu dengan obyek lainnya dengan memakai baut untuk mengencangkan kedua obyek tersebut. Maka urutan model adalah Memperoleh Menempatkan Memakai Melepas Kembali A B G A B P * A B G A A1B0G A1B0P F A1B0G A0 Atau A1B0G1A1B0P3F3A1B0G1A0 TMU : ( ) x 10 = 110 TMU
 x 10 = 110 TMU.")
24
The Manual Crane Sequence (Pemindahan dengan Crane Manual)
II. Model Urutan Penanganan Peralatan ( The Equipment Handling Sequence Models) The Manual Crane Sequence (Pemindahan dengan Crane Manual) The Powered Crane Sequence (Pemindahan dengan Crane Listrik/Diesel) The Truck Sequence (Pemindahan dengan Truk)
 The Manual Crane Sequence (Pemindahan dengan Crane Manual) The Powered Crane Sequence (Pemindahan dengan Crane Listrik/Diesel) The Truck Sequence (Pemindahan dengan Truk)")
25
2.1 The Manual Crane Sequence.
urutan aktivitas untuk model ini ialah : Operator menuju crane ( A ) Crane dpindahkan dalam keadaan kosong ke lokasi objek yang akan dipindahkan ( T ). Objek diangkut dengan tali dan singkirkan objek lain yang menggangu ( K,F ). Objek dinaikan secara vertikal dengan crane ( V ). Crane dpindahkan dalam keadaan berbeban ke lokasi penempatan ( 1 ). Objek diturunkan secara vertikal dari crane ( V ). Objek ditempatkan di atas palet, kontainer dan sebagainya, kemudian tali pengikat dilepaskan dari crane ( P ). Crane dipindahkan dalam keadaan kosong ke tempat tertentu ( T ). Operator kembali ke tempat semula ( A ).
 Crane dpindahkan dalam keadaan kosong ke lokasi objek yang akan dipindahkan ( T ). Objek diangkut dengan tali dan singkirkan objek lain yang menggangu ( K,F ). Objek dinaikan secara vertikal dengan crane ( V ). Crane dpindahkan dalam keadaan berbeban ke lokasi penempatan ( 1 ). Objek diturunkan secara vertikal dari crane ( V ). Objek ditempatkan di atas palet, kontainer dan sebagainya, kemudian tali pengikat dilepaskan dari crane ( P ). Crane dipindahkan dalam keadaan kosong ke tempat tertentu ( T ). Operator kembali ke tempat semula ( A ).")
26
Perpindahan suatu objek dengan crane manual mempunyai model sebagai berikut : A T K F V L V P T A
A. Jarak yang ditempuh oleh operator. T. Memindahkan crane dalam keadaan kosong. K. Menyambung atau melepas sambungan. F. Pembebasan objek. V. Gerakan vertikal. L. Gerakan dalam keadaan terbeban. P. Menempatkan.

27
The Manual Crane Sequence..
Contoh : Seorang operator mesin berjalan 4 langkah ke arah crane dan memindahkan crane secara manual ke suatu fixture yang beratnya 30 kg dengan jarak 2 meter. Fixture disambung dengan alat pemegang dari crane kemudian dipindahkan sejauh 4,5 m ke meja kerja yang tingginya 1 m dari lantai. Fixture ditrunkan sejauh 10 cm dan diletakan di atas meja. Operator memindahkan crane kosong 1 m dan kembali ke meja kerja dalam 2 langkah. Model di atas : A16 T16 K24 F3 V16 L24 V3 P3 T10 A3 Waktunya : ( ) X 10 = 1080 TMU
 X 10 = 1080 TMU.")
28
2.2 The Powered Crane Sequence.
Model ini berhubungan dengan perpindahan objek dengan bantuan crane listrik atau diesel. Urutan model untuk aktivitas ini ialah : A T K T P T A Dimana : A.Jarak yang ditempu operator berjalan ke atau dari panel kendali crane. T. Perpindahan crane dengan atau tanpa beban. K. Menghubungkan dan melepas hubungan antara objek dengan crane. P. Menempatkan objek pada lokasi tertentu.

29
Contoh : Seorang operator berjalan sejauh 27 meter ke panel kendali crane dan memindahkan crane ke benda kerja sejauh 8 m, Benda kerja disambung dengan crane dengan satu cantelan dan dipindahkan sejauh 0,5 m dimana ditempatkan dengan mengubah arah dua kali. Operator kemudian memindahkan crane sejauh 3 m dan operator kembali ke benda kerja. Model di atas: A6 P16 K24 T10 P16 T16 A1 Waktunya adalah : ( ) X 100 = 8900 TMU
 X 100 = 8900 TMU.")
30
2.3 The Truck Sequence Model ini menitikberatkan pada pemindahan material secara horizontal dari satu lokasi ke lokasi lain dengan menggunakan “ peralatan yang beroda “ Peralatan beroda ini dapat dibagi dalam dua kategori, Yaitu : truk yang dikendarai dan yang didorong. Pemindahan material dengan truk terdiri dari aktivitas-aktivitas berikut ini : Operator berjalan menuju truk ( A ) Operator duduk ( jika dikendarai ) dan menjalankan truk ( S ) Truk dijalankan menuju material yang akan ditangani ( T ) Material diangkut dengan alat angkut yang terdapat pada truk seperto fork ( L ). Material dpindahkan ke lokasi yang diinginkan ( T ). Material diletakan ( L ) Truk dipindahkan ke lokasi lain dan di parkir ( A ) Operator kembali ke lokasi semula atau ke lokasi yang lain ( A )
 Operator duduk ( jika dikendarai ) dan menjalankan truk ( S ) Truk dijalankan menuju material yang akan ditangani ( T ) Material diangkut dengan alat angkut yang terdapat pada truk seperto fork ( L ). Material dpindahkan ke lokasi yang diinginkan ( T ). Material diletakan ( L ) Truk dipindahkan ke lokasi lain dan di parkir ( A ) Operator kembali ke lokasi semula atau ke lokasi yang lain ( A )")
31
The Truck Sequence… Aktivitas di atas digambarkan dengan urutan model sebagai berikut : A S T L T L T A A. Jarak yang ditempuh oleh operator ke atau dari truk. S. Aktivitas untuk menyiapkan truk untuk siap bergerak ditambah aktivitas parkir setelah mengakhiri pemindahan material. T. Pergerakan truk dengan tanpa beban. L. Pengambilan material pada lokasi awal atau penempatan material pada lokasi akhir dengan menggunakan fork atau alat pengangkut laiinya.

32
The Truck Sequence… Contoh :
Seorang operator berjalan 36 m menuju foklift, loncat untuk duduk dan menghidupkan mesin. Truk tersebut dijalankan sejauh 4 m. Palet diambil dan atas lantai kemudian dipindahkan dengan foklift sejauh 23 m dan ditempatkan pada rak palet. Truk kemudian diparkir dengan jarak 9 m dan operator kembali ke tempat kerja sejauh 18 meter. Model di atas: A6 S6 T1 L6 T6 L10 T3 A3 Waktunya ( ) x 100 = 4100 TMU
 x 100 = 4100 TMU.")
34
GENERAL MOVE (ABGABPA)
INDEX A B G P Action distance Body Motion Gain control Place ≤2in ≤5cm Hold Toss 1 Within Reach Light object Light object simo Lay aside Loose Fit 3 1-2 Steps Bend and rise 50% Non simo Heavy or Bulky Blind or obstructed Disengage Interlocked Collect Adjustments Light Pressure Double 6 3-4 Steps Bend or rise Care or Precision Heavy Pressure Blind or Obstructed Intermediate Moves 10 5-7 Steps Sit or Stand ON or OF 16 8-10 Steps Through Door Climb on or off

35
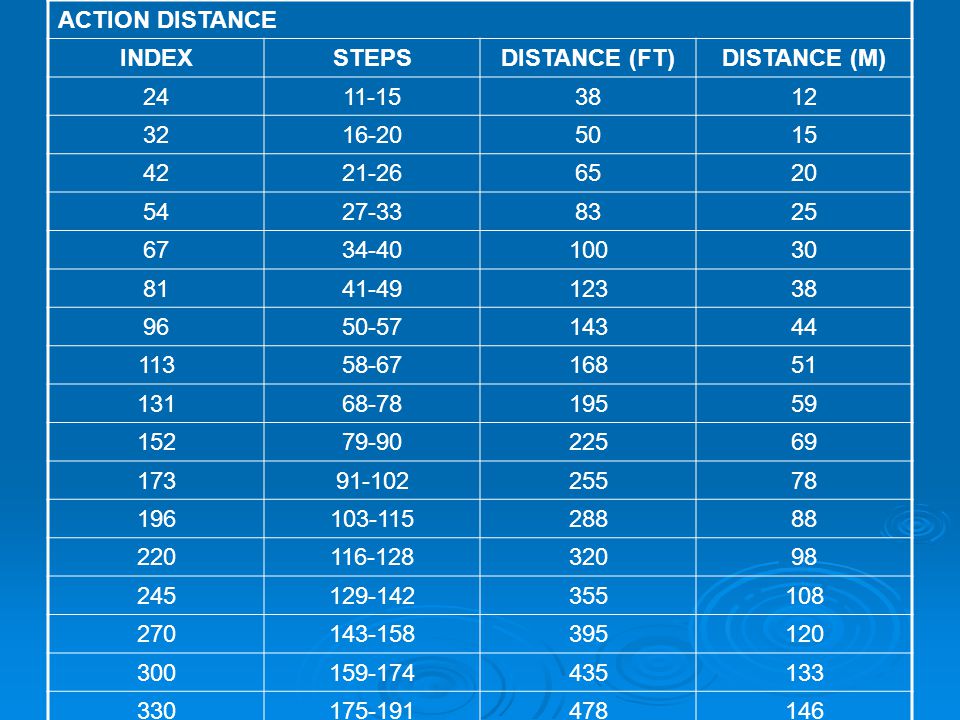
ACTION DISTANCE INDEX STEPS DISTANCE (FT) DISTANCE (M) 24 11-15 38 12 32 16-20 50 15 42 21-26 65 20 54 27-33 83 25 67 34-40 100 30 81 41-49 123 96 50-57 143 44 113 58-67 168 51 131 68-78 195 59 152 79-90 225 69 173 91-102 255 78 196 288 88 220 320 98 245 355 108 270 395 120 300 435 133 330 478 146
36
ABGMXIA CONTROLLED MOVE SEQUENCE
INDEX M X I MOVE CONTROLLED PROCESS TIME ALIGN PUSH/PULL/PIVOT CRANX (REVS) SECOND MINUTES HOURS OBJECT 1 ≤12in (30CM) Button/Switch/Knob - 0.5 0.01 0.0001 To one point 3 >12in (30cm) Resistance,seat or unseat High Control 2 Stage ≤12in 1.5 0.02 0.0004 To two point ≤4in(10cm) 6 2Stage>12in(30cm) 2.5 0.04 0.0007 To two point >4in(10cm 10 3-4 Stages 4.5 0.07 0.012 16 11 7.0 1.0 0.0019 Precision
 SECOND. MINUTES. HOURS. OBJECT. 1. ≤12in (30CM) Button/Switch/Knob To one point. 3. >12in (30cm) Resistance,seat or unseat. High Control. 2 Stage ≤12in To two point ≤4in(10cm) 6. 2Stage>12in(30cm) To two point >4in(10cm Stages Precision.")
38
4 5 6 MOST-Calculation Code Date (1) Wilayah (2) Sign Page
Kegiatan (3) Kondisi No Methode Sequence model (Urutan Model) FT TMU 4 5 Time (Waktu) 6
 Kondisi. No. Methode. Sequence model (Urutan Model) FT. TMU Time (Waktu) 6.")
39
Ket 1 = Pencacahan (Identifikasi)
2 = Tempat pekerjaan berlangsung (Area) 3 = Jenis kegiatan dan kondisi kerja 4 = Uraian metoda kerja 5 = Analisa model urutan gerakan Cara menganalisa lembaran perhitungan diatas adalah Tentukan kode dari pekerjaan, wilayah kerja dan kegiatannya Menentukan metode kerja yang akan dianalisa dengan cara membagi pekerjaan atas sub kegaiatn yang berurutan Memilih model urutan gerakan yang sesuai untuk setiap metode kerja Tentukan indeks nilai waktu yang paling tepat untuk setiap parameter (elemen gerakan) di dalam model urutan Jumlahkan semua nilai indeks waktu dari tiap elemen gerakan, kalikan dengan 10, dan cantumkan hasil penjumlahannya pada kolom paling kanan dibawah tulisan TMU Untuk seluruh kegiatan, jumlahkan semua waktu dari urutan-urutan kegiatan dan cantumkan hasilnya pada bagian bawah kanan dalam TMU. Jika diinginkan dalam satuan yang lain, maka dicantumkan di bagian bawah kiri setelah di rubah kedalam satuan waktu lain (jam, menit, detik, dan lain-lain)
 3 = Jenis kegiatan dan kondisi kerja. 4 = Uraian metoda kerja. 5 = Analisa model urutan gerakan. Cara menganalisa lembaran perhitungan diatas adalah. Tentukan kode dari pekerjaan, wilayah kerja dan kegiatannya. Menentukan metode kerja yang akan dianalisa dengan cara membagi pekerjaan atas sub kegaiatn yang berurutan. Memilih model urutan gerakan yang sesuai untuk setiap metode kerja. Tentukan indeks nilai waktu yang paling tepat untuk setiap parameter (elemen gerakan) di dalam model urutan. Jumlahkan semua nilai indeks waktu dari tiap elemen gerakan, kalikan dengan 10, dan cantumkan hasil penjumlahannya pada kolom paling kanan dibawah tulisan TMU. Untuk seluruh kegiatan, jumlahkan semua waktu dari urutan-urutan kegiatan dan cantumkan hasilnya pada bagian bawah kanan dalam TMU. Jika diinginkan dalam satuan yang lain, maka dicantumkan di bagian bawah kiri setelah di rubah kedalam satuan waktu lain (jam, menit, detik, dan lain-lain)")
40
URAIAN KETERANGAN ELEMEN-ELEMEN GERAKAN MOST
Y (1) : Gerak pindah tempat tempat oleh tangan yang menempuh jarak kurang dari atau sama dengan 5cm (dalam tabel MOST diberi indeks A0 ). Misalnya menjangkau tombol pada mesin hitung Y(2) : Gerak pindah tempat oleh tangan maupun kai tanpa disertai gerakan tubuh dalam jarak sejauh jangkauan tangan. Gambar A1 di bawah ini menunjukan gerakan yang termasuk Y(1). Dalam tabel MOST diberi indeks A1 Gambar A1 Elemen gerak pindah dalam jangkauan tangan
 : Gerak pindah tempat tempat oleh tangan yang menempuh jarak kurang dari atau sama dengan 5cm (dalam tabel MOST diberi indeks A0 ). Misalnya menjangkau tombol pada mesin hitung. Y(2) : Gerak pindah tempat oleh tangan maupun kai tanpa disertai gerakan tubuh dalam jarak sejauh jangkauan tangan. Gambar A1 di bawah ini menunjukan gerakan yang termasuk Y(1). Dalam tabel MOST diberi indeks A1. Gambar A1 Elemen gerak pindah dalam jangkauan tangan.")
41
Y(3) : Gerak pindah tempat sejauh 1-2 langkah (dalam MOST di beri indeks A3)
Y(5) : Gerak tubuh untuk bungkuk dan bangkit kembali. Hal ini ditunjukan oleh gambar A-2. Dalam tabel MOST gerak ini diberi indeks B6 Gambar A-2 Gerak bungkuk dan bangkit, terlihat bahwa tangan bisa mencapai bagian yang lebih bawah dari lutut.
 : Gerak tubuh untuk bungkuk dan bangkit kembali. Hal ini ditunjukan oleh gambar A-2. Dalam tabel MOST gerak ini diberi indeks B6. Gambar A-2 Gerak bungkuk dan bangkit, terlihat bahwa tangan bisa mencapai bagian yang lebih bawah dari lutut.")
42
Y(6) : Gerak bungkuk dan bangkit 50%, misalnya orang yang sedang menumpuk barang. Dalam MOST diberi indeks B3. Untuk jelasnya bisa dilihat pada gambar A-3 Y(7) : Gerak duduk atau berdiri, misalnya pada saat akan berdiri atau duduk, dilakukan gerakan tangan, kaki dan bagian-bagian badan lainnya untuk menggerakan kursi keposisi yang memungkinkan untuk duduk atau berdiri. Dalam MOST diberi indeks B10. Gambar A-3 Gerakan bungkuk dan bangkit 50%
 : Gerak duduk atau berdiri, misalnya pada saat akan berdiri atau duduk, dilakukan gerakan tangan, kaki dan bagian-bagian badan lainnya untuk menggerakan kursi keposisi yang memungkinkan untuk duduk atau berdiri. Dalam MOST diberi indeks B10. Gambar A-3 Gerakan bungkuk dan bangkit 50%")
43
Y(8) : Melewati pintu, dalam MOST diberi indeks B16
Y(8) : Melewati pintu, dalam MOST diberi indeks B16. Parameter ini terdiri dari elemen gerakan menjangkau, dan memutar daun pintu, melewati pintu dan menutupnya. Untuk lebih jelasnya bisa dilihat gambar A-4 di bawah ini.
 : Melewati pintu, dalam MOST diberi indeks B16. Parameter ini terdiri dari elemen gerakan menjangkau, dan memutar daun pintu, melewati pintu dan menutupnya. Untuk lebih jelasnya bisa dilihat gambar A-4 di bawah ini.")
44
Y(9) : Gerak dengan objek ringan
Y(9) : Gerak dengan objek ringan. Sebagai contoh mengambil sebuah mur dari wadahnya. Elemen ini diberi indeks G-1 dalam MOST. Y(10) : Gerak mengambil objek ringan simo. Merupakan gerakan manual yang dilakukan dalam waktu bersamaan oleh anggota tubuh yang berlainan. Misalnya tangan kiri mengambil palu, dan tangan kanan mengambil kapu dalam waktu yang bersamaan (G1) Y(11) : Non-simo, dalam gerakan ini operator tidak dapat melakukan pengendalian 2 objek secara bersamaan. Sementara satu tangan menyentuh objek, yang lain harus menunggu sebelum tangan yang satu tersebut dapat menyentuh objek yang lain. Dalam MOST elemen gerakan ini diberi indeks G3. Y(12) : Berat/besar sekali; pengendalian objek yang berat (besar) dicapai setelah otot-otot ditegangkan pada titik dimana teratasinya kesulitan akibat berat bentuk atau ukuran. Contoh menjangkau aki mobil yang diletakan di lantai, mengambil kotak tempat TV yang besar dan kosong. Dalam metode MOST elemen gerakan ini diberi indeks G3. Untuk lebih jelas, gambar A-4 menunjukan elemen gerakan ini.
 : Gerak dengan objek ringan. Sebagai contoh mengambil sebuah mur dari wadahnya. Elemen ini diberi indeks G-1 dalam MOST. Y(10) : Gerak mengambil objek ringan simo. Merupakan gerakan manual yang dilakukan dalam waktu bersamaan oleh anggota tubuh yang berlainan. Misalnya tangan kiri mengambil palu, dan tangan kanan mengambil kapu dalam waktu yang bersamaan (G1) Y(11) : Non-simo, dalam gerakan ini operator tidak dapat melakukan pengendalian 2 objek secara bersamaan. Sementara satu tangan menyentuh objek, yang lain harus menunggu sebelum tangan yang satu tersebut dapat menyentuh objek yang lain. Dalam MOST elemen gerakan ini diberi indeks G3. Y(12) : Berat/besar sekali; pengendalian objek yang berat (besar) dicapai setelah otot-otot ditegangkan pada titik dimana teratasinya kesulitan akibat berat bentuk atau ukuran. Contoh menjangkau aki mobil yang diletakan di lantai, mengambil kotak tempat TV yang besar dan kosong. Dalam metode MOST elemen gerakan ini diberi indeks G3. Untuk lebih jelas, gambar A-4 menunjukan elemen gerakan ini.")
45
Y(34) : Gerak ungkitan pergelangan tangan dengan 3 ungkitan dan dalam MOST diberi indeks F10
Y(33) : Ungkitan pergelangan tangan (wrist crank); menunjukan pemakaian alat yang diputarkan sekitar suatu pengencang yang tetap posisinya. Alat-alat tersebut ditunjukan dengan gerak melingkar tangan yang dicantumkan pada gambar A6. Jenis gerak pergelangan tangan ini kadang-kadang dilakukan dengan alat kunci inggris atau kunci pas, dimana tidak terdapat penghalang pada lintasan alat. Dengan mengikuti penempatan awal alat, jari dan tangan dipakai untuk mendorong atau mengungkit alat sekitar bagian pengencang (pengikat). Gerakan-gerakan pergelangan tangan yang dilakukan oleh operator jika terdapat hambatan. Elemen gerakan Y(33) ini menunjukan gerakan dengan 1 kali ungkitan dalam MOST diberi indeks F3
 : Ungkitan pergelangan tangan (wrist crank); menunjukan pemakaian alat yang diputarkan sekitar suatu pengencang yang tetap posisinya. Alat-alat tersebut ditunjukan dengan gerak melingkar tangan yang dicantumkan pada gambar A6. Jenis gerak pergelangan tangan ini kadang-kadang dilakukan dengan alat kunci inggris atau kunci pas, dimana tidak terdapat penghalang pada lintasan alat. Dengan mengikuti penempatan awal alat, jari dan tangan dipakai untuk mendorong atau mengungkit alat sekitar bagian pengencang (pengikat). Gerakan-gerakan pergelangan tangan yang dilakukan oleh operator jika terdapat hambatan. Elemen gerakan Y(33) ini menunjukan gerakan dengan 1 kali ungkitan dalam MOST diberi indeks F3.")
46
Perakitan Steker

47
Tangan Kiri kumulatif Tangan Kanan Elemen Gerakan Notasi TMU
Mengambil komp.penghantar A1B10G1/A1B10P1/A1 250 A0B0G0/A0B0P0/A0 Menganggur 500 Mengambil mur 2A 920 420 A1B10G1/A1B10P1/F11/A1B10P1/A1 Merakit komp.penghantar dengan mur 2 menggunakan obeng (10 putaran) 1170 1590 A1B10G1/A1B10P1/F10/A1B10P1/A1 Merakit hasil rakitan 1 dengan mur 2B menggunakan obeng (10 putaran) Mengambil rangka A 1840
 A1B10G1/A1B10P1/F10/A1B10P1/A1. Merakit hasil rakitan 1 dengan mur 2B menggunakan obeng (10 putaran) Mengambil rangka A")
48
Waktu Baku = 3770 TMU x 0,036 = 135,620 detik Menganggur 2220 380
A0B0G0/A0B0P0/A0 2220 380 A1B10G1/A1B10P1/f1/A1B10P1/A1 Merakit hasil rakitan 2 dengan rangka A Mengambil rangka B A1B10G1/A1B10P1/A1 250 2470 2850 A1B10G1/A1B10P1/F1/A1B10P1/A1 Merakit hasil rakitan 3 dengan rangka B 3100 Mengambil baut 3350 Mengambil mur 1 3770 420 A1B10G1/A1B10P1/F10/A1B10P1/A1 Merakit hasil rakitan 4 dengan baut dan mur dengan obeng (10 putaran) Waktu Baku = 3770 TMU x 0,036 = 135,620 detik
 Waktu Baku = 3770 TMU x 0,036. = 135,620 detik.")
Presentasi serupa


>")











>")




>")

