Jurusan Teknik Gas dan Petrokimia FTUI Feedback Control Ir. Abdul Wahid, MT. Jurusan Teknik Gas dan Petrokimia FTUI
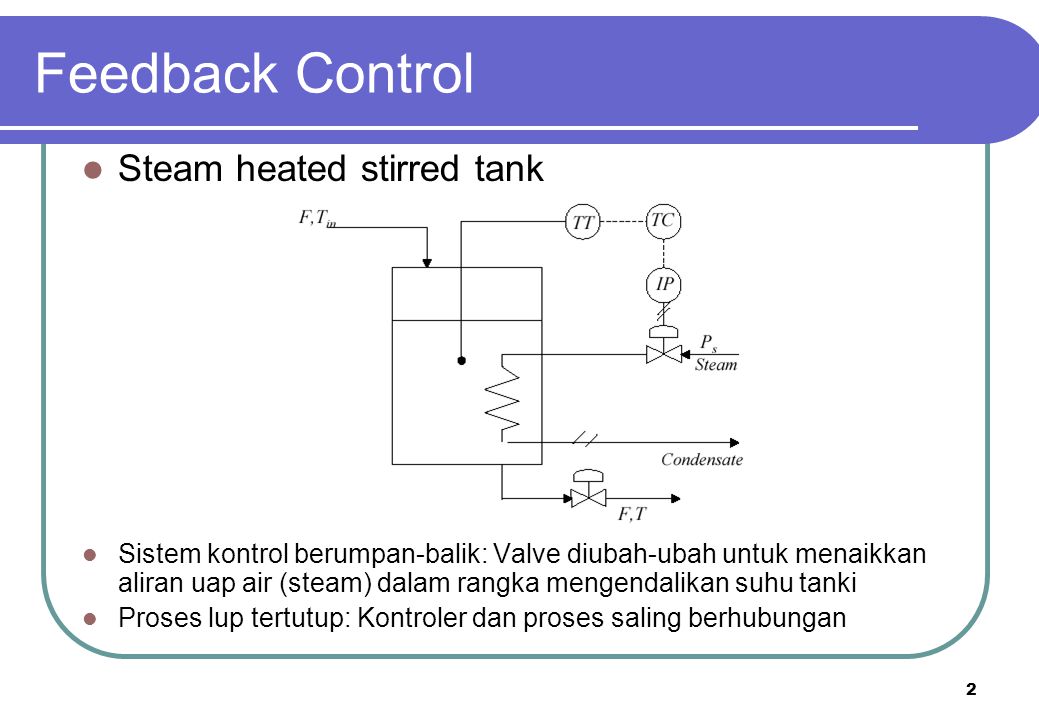
Feedback Control Steam heated stirred tank Sistem kontrol berumpan-balik: Valve diubah-ubah untuk menaikkan aliran uap air (steam) dalam rangka mengendalikan suhu tanki Proses lup tertutup: Kontroler dan proses saling berhubungan
Feedback Control Obyektif Pengendalian: Kontrol Berumpan-balik: Menjaga suhu keluar dan level tanki tertentu Kontrol Berumpan-balik: Suhu diukur dengan termokopel Suhu yang tidak diinginkan memicu terjadinya perubahan pada tekanan steam suplai Catatan: Informasi suhu diukur pada keluaran proses/perubahan yang dihasilkan dari aliran masuk atau gangguan suhu Perubahan aliran masuk (yakni, Tin) HARUS mempengaruhi proses sebelum penyetelan dibuat
Contoh Kontrol Berumpan-balik: Memerlukan sensor dan aktuator Misal: Lup pengontrolan suhu Kontroler: Komponen perangkat lunak yang melaksanakan perhitungan matematika Komponen perangkat keras yang menyediakan sinyal yang terkalibrasi untuk aktuator Aktuator: Proses (dengan dinamik) fisik yang dipicu oleh kontroler Mempengaruhi proses secara langsung Sensor: Memantau beberapa sifat sistem dan mentransmisikan sinyal balik ke kontroler
Proses Lup Tertutup Studi dianamika proses memfokuskan pada proses yang tak-terkontrol atau proses lup terbuka Amati perilaku proses sebagai hasil dari sinyal masukan tertentu Dalam pengendalian proses, kita dikenai perilaku dinamik dari proses terkendali atau lup tertutup Kontroler adalah sistem dinamik yang berhubungan dengan proses dan perangkat keras proses yang menghasilkan perilaku khusus
Fungsi Alih Lup Tertutup Diagram blok proses lup tertutup
Fungsi Alih Lup Tertutup Untuk kontrol, kita perlu mengidentifikasi dinamik lup terutup disebabkan oleh: Perubahan setpoint servo Perubahan gangguan regulatory 1. Respon Servo Lup Terutup fungsi alih yang menghubungkan Y(s) dan R(s) saat D(s) = 0 mengisolasi Y(s):
Fungsi Alih Lup Tertutup 2. Respon Regulatori Lup Tertutup Fungsi alih yang menghubungkan D(s) ke Y(s) saat R(s)=0 Mengisolasi Y(s):
Fungsi Alih Lup Tertutup 3. Fungsi alih lup tertutup keseluruhan
PID Control PID adalah singkatan darI: Kontroler PID P : Proportional I : Integral D : Derivative Kontroler PID Lebih dari 90% dari seluruh kontrol yang diterapkan Sudah dipakai sejak tahun 1930-an Sangat baik dipelajari dan dipahami Struktur optimal pada proses orde satu dan dua (diberikan beberapa asumsi) Selalu menjadi pilihan pertama saat mendisain sistem kontrol
PID Control Persamaan Kontroler PID Parameter Kontroler PID
PID Control Fungsi Alih Kontroler PID Catatan: Ada banyak variasi kontroler ini Mudah diterapkan dalam SIMULINK Setiap mode (atau aksi) kontroler lebih baik dipelajari secara sendiri-sendiri
Proportional Feedback Dari: Fungsi alih: atau Bentuk lup-tertutup:
Proportional Feedback Contoh: Diketahui proses orde satu: Untuk dinamik lup-tertutup berumpan-balik hanya P-saja:
Proportional Feedback Respon akhir: Catatan: Untuk “respon offset nol” kita memerlukan Mungkin untuk menghilangkan offset dengan berumpan-balik P-saja (memerlukan gain kontroler yang tak terbatas) Perlu kontroler yang lain untuk menghilangkan offset (integral)
Proportional Feedback Dinamika servo dari proses orde satu dengan berumpan-balik proporsional Naiknya gain kontroler akan menghilangkan offset
Proportional Feedback Proses orde-tinggi misalnya proses orde dua redaman kurang naiknya gain kontroler mengurangi offset, mempercepat respon dan menaikkan osilasi
Proportional Feedback Hal-hal penting: Proportional feedback tidak mengubah orde sistem Dimulai dari proses orde satu, proses lup-tertutup pun orde satu Orde polinomial karakteristik tidak berubah di bawah proportional feedback Kecepatan respon proses lup-tertutup adalah akibat langsung dari gain kontroler Naiknya gain kontroler mengurangi konstanta waktu lup-tertutup Secara umum, proportional feedback adalah: Mengurangi (tidak menghilangkan offset) Mempercepat respon Untuk proses yang berosilasi, membuat proses lup-tertutup lebih berosilasi
Integral Control Pengintegral (integrator) dilibatkan untuk menghilangkan offset Menyediakan aksi set ulang (reset action) Biasanya ditambahkan pada kontroler proporsional untuk menghasilkan kontroler PI Kontroler PID dengan aksi derivatifnya dimatikan Kontroler PI paling luas digunakan di industri Struktur optimal untuk proses orde satu Bentuk kontroler PI Model fungsi alih
PI Feedback Respon lup-tertutup Pernyataan lebih kompleks Derajat (orde) penyebut naik satu
PI Control Contoh kontroler PI untuk proses orde satu respon lup-tertutup Offset hilang Lup-tertutupnya orde dua
PI Control Efek konstanta waktu integral dan gain kontroler pada dinamik lup-tertutup Periode natural dari osilasi Koefisien redaman Konstanta waktu integral dan gain kontroler akan menyebabkan terjadinya osilasi dan merubah periode osilasi
PI Feedback Efek gain kontroler Efek konstanta waktu integral Berpengaruh mempercepat respon Semakin naik gainnya semakin cepat penghilangan offsetnya Mengurangi konstanta waktu integral: Menghilangkan pengaruh gangguan Membuat perilaku lebih berosilasi
PI Feedback Hal-hal penting: Aksi integral menaikkan orde sistem dalam lup-tertutup Kontroler PI memiliki dua parameter setelan yang dapat mempengaruhi secara bebas: Mempercepat respon Respon akhir (offset) aksi integral menghilangkan offset Aksi integral: Seharusnya kecil dibandingkan dengan aksi proporsional Disetel untuk menghilangkan offset pelan-pelan Dapat menyebabkan atau manaikkan osilasi Dapat menjadi destabilisasi
Aksi Derivative Derivatif dari sinyal kesalahan (error signal) Digunakan sebagai kompensasi kecenderungan pada keluaran Ukuran kecepatan perubahan sinyal kesalahan Menyediakan prediktif atau aksi antisipasi P dan I hanya respon terhadap kesalahan yang telah lewat dan saat ini Mode derivatif memiliki bentuk Jika kesalahan naik, aksi kontrol turun Jika kesalahan turun, aksi kontrol naik PID selalu diterapkan dalam bentuk:
PID Feedback Fungsi alih Fungsi alih lup-tertutup Sedikit lebih kompleks dari pada bentuk PI
PID Feedback Contoh Kontrol PID untuk proses orde satu fungsi alih lup-tertutup
PID Feedback Efek aksi derivatif pada dinamik servo Harga D yang kecil: Naiknya D reduksi deviasi maksimum, waktu respon dan derajat osilasi Harga D yang besar: Noise dikuatkan Respon lebih berosilasi
Beberapa Hal dalam Kontrol PID Hal-hal penting: Kontroler PID memiliki tiga parameter setelan dan dapat berpengaruh secara bebas: Mempercepat respon Respon akhir (offset) Respon servo dan regulatori Aksi derivatif: Seharusnya kecil dibandingkan dengan aksi integral Memiliki pengaruh menstabilkan Sulit menggunakan sinyal noise Biasanya dimodifikasi dalam penerapannya
Aksi Searah/Berlawanan Air-to-open (AO) valve Keluaran kontroler seharusnya turun saat ym turun Kontrol aksi berlawanan (Kc>0) Air-to-close (AC) valve Keluaran kontroler seharusnya naik saat ym naik Kontrol aksi searah (Kc>0)
Kejenuhan Kontroler Perilaku kontrol proporsional ideal Perilaku aktual
Reset Windup Apa itu Reset Windup? Kesalahan (error) yang terus-menerus yang menyebabkan bagian integral menjadi sangat besar dan keluaran kontroler PID akhirnya jenuh. Anti reset windup: aksi integral untuk sementara berhenti kapanpun keluaran kontroler jenuh
Realisasi Aksi Derivatif Kontrol PID ideal Yang tidak dapat direalisasikan secara fisik Perlu informasi selanjutnya Gain tak terbatas untuk input perubahan step
Realisasi Aksi Derivatif Kontroler PID komersial dengan sangat kecil Sistem yang tepat fungsi alih yang memiliki orde penyebut tidak lebih bear (atau lebih kecil) dari pada orde pembilangnya adalah sistem yang tepat (atau sangat tepat) Sistem yang tidak tepat tidak dapat direalisasikan
Derivative Kick Kontroler PID ideal Perubahan setpoint yang tiba-tiba, e(t), akan menyebabkan bagian derivatif sangat besar Menghilangkan derivative kick Ambillah aksi derivatis pada pengukuran ym dari pada sinyal kesalahan e