Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
Kontes Robot Pemadam Api Indonesia (KRPAI) 2013
PANDUAN PERATURAN DIVISI BERODA DIVISI BERKAKI Direktorat Penelitian dan Pengabdian kepada Masyarakat Direktorat Jenderal Pendidikan Tinggi Kementerian Pendidikan Nasional

2
Tema Tema untuk Kontes Robot Pemadam Api Indonesia 2013
Kontes Robot Cerdas Pemadam Api

3
Bentuk Robot Robot Berkaki Robot Beroda Robot Humanoid

4
Divisi Divisi Beroda Divisi Berkaki
Divisi Beroda: Suatu divisi dimana robot menggunakan roda sebagai alat geraknya dengan misi mencari dan memadamkan api di arena lapangan berbentuk simulasi interior suatu rumah. Pada divisi ini yang diutamakan adalah kemampuan robot bernavigasi dan bermanuver serta kecepatan dalam menyelesaikan misinya tersebut. Robot yang berhasil menemukan dan memadamkan api tercepat dinyatakan sebagai pemenang

5
Divisi Berkaki: Sama halnya dengan Divisi Senior Beroda, hanya saja robot menggunakan kaki sebagai alat geraknya.

6
Pemenang KRPAI Nasional 2004 - 2012
Tahun KRCI ke Penyelenggara Pemenang Nasional Beroda Berkaki Expert Single Expert Swarm 2004 KRCI 1 UI Polban UBAYA X 2005 KRCI 2 ITB PENS 2006 KRCI 3 2007 KRCI 4 ITS Unibraw UNIKOM 2008 KRCI 5 Unikom PCR 2009 KRCI 6 UGM LPKTA – Yogyakarta Tidak dipertandingkan

7
2011 KRCI8 ITT PENS 2012 KRCI9 POLBAN Tahun KRCI ke Penyelenggara
Pemenang Nasional Beroda Berkaki Battle Bola 2010 KRCI 7 UMM UGM ITB Bengkalis 2011 KRCI8 ITT PENS 2012 KRCI9 POLBAN

8
Pertandingan Internasional
Fire Fighting Robot Contest A) Trinity College, Hartford, Connecticut, Amerika Serikat. B) Robogames, San Fransisco/San Mateo, Amerika Serikat.
 Trinity College, Hartford, Connecticut, Amerika Serikat. B) Robogames, San Fransisco/San Mateo, Amerika Serikat.")
10
Prestasi Internasional Tim Indonesia di Amerika
2009 : Beroda : Juara 1 (Medali Emas) (UNIKOM), ROBOGAMES San Francisco, Amerika Serikat Berkaki : Juara 4 (UNIKOM) ROBOGAMES San Francisco, Amerika Serikat 2010 : Beroda : Juara 5 (UNIKOM), Berkaki : Juara 4 (ITB), 5,6 (UNIKOM) 2011 : Juara ke 1 (Medali Emas) Beroda (UGM) Juara ke 2 (Medali Perak) Beroda (UGM) Juara ke 1 (Medali Emas) Berkaki (ITB) Juara ke 2 (Medali Perak) Berkaki (ITB) Juara 1 (Medali Emas) Robowaiter (Unikom) 2012 : Beroda : Juara 1 (Medali Emas),2 (Medali Perak), 7, (ITT Telkom) Berkaki : Juara 1 (Medali Emas) (IT Telkom), 2 (Medali Perak) ,3 (ITB)
 (UNIKOM), ROBOGAMES San Francisco, Amerika Serikat. Berkaki : Juara 4 (UNIKOM) ROBOGAMES San Francisco, Amerika Serikat : Beroda : Juara 5 (UNIKOM), Berkaki : Juara 4 (ITB), 5,6 (UNIKOM) 2011 : Juara ke 1 (Medali Emas) Beroda (UGM) Juara ke 2 (Medali Perak) Beroda (UGM) Juara ke 1 (Medali Emas) Berkaki (ITB) Juara ke 2 (Medali Perak) Berkaki (ITB) Juara 1 (Medali Emas) Robowaiter (Unikom) 2012 : Beroda : Juara 1 (Medali Emas),2 (Medali Perak), 7, (ITT Telkom) Berkaki : Juara 1 (Medali Emas) (IT Telkom), 2 (Medali Perak) ,3 (ITB)")
11
Hasil Trinity (Amerika) beroda dan berkaki 2011
S-18 KOPLAX S-13 IRON FIRE S-37 Suqian S-22 Neptune v S-38 The Blazing Ace S-8 Fire Warrior S-9 FlameOut W-2 ASA W-6 Zarqun W-1 ADoT W-5 Rambler W-3 Derp W-4 Manoide

12
Hasil Trinity (Amerika): Beroda 2012
: Beroda 2012")
13
Hasil Trinity (Amerika): Berkaki 2012
: Berkaki 2012")
14
Trinity Firefighting Robot Contest 2013
Yang dikirim DIKTI adalah pemenang KRCI 2012 : Beroda : POLBAN Berkaki : UGM Pemenang KRCI (KRPAI) selalu berganti. Tahun depan giliran andakah ???
 selalu berganti. Tahun depan giliran andakah")
15
Contoh Pertandingan Clip Video

16
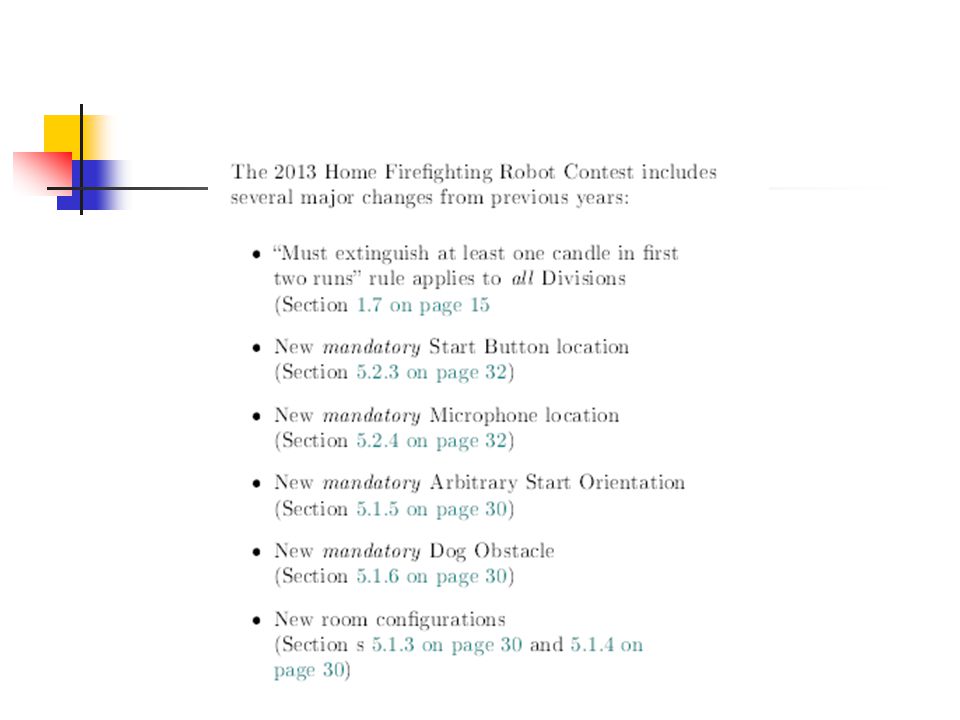
Rule KRPAI Rule utama : rule Trinity 2013 (TCFFRC 2013)
Rule KRPAI dikti : penegasan dan tambahan. Jika ada perbedaan dengan rule Trinity, maka yang dipakai Rule Dikti. Jika perbedaan besar, akan didiskusikan lebih lanjut.

17
Beberapa Perubahan Ukuran arena dari 248 x 248 cm2 244 x 244 cm2
Room 1 dari 1 pintu 2 pintu. Pola karpet berubah. Dog obstacle. Sound activation disediakan. Posisi-posisi tertentu untuk tombol dan Mic berikut warna backgroundnya. Mengacu ke rule Trinity (Trinity College Fire-Fighting Home Robot Contest 2013 Rules - TCFFHRC_Rules_2013-Final _A4.pdf) Update Rule dan tanya jawab di milis
 Update Rule dan tanya jawab di milis.")
19
Robot Dan kelengkapannya
Dimensi Sound Activation Tombol Manual Pemadam Api

20
Dimensi Divisi Beroda: 31 cm x 31 cm x 27 cm
Divisi Berkaki: 46 cm x 31 cm x 27 cm Bagian apapun dari robot dilarang melebihi dimensi tersebut

21
Sound Activation berfungsi sebagai remote kontrol pengaktivan robot melalui bunyi-bunyian frekuensi suara terdengar berkisar di 3 KHz s.d. 4 KHz nominalnya 3.8 KHz. Pola bunyi-bunyian yang dikeluarkan harus sama saat start ataupun retry begitu juga sama dari satu sesi pertandingan ke sesi pertandingan lainnya. dihasilkan dari sumber suara yang bersifat elektronik. tepuk tangan, siulan, genderang, bunyi mekanik dan sejenisnya) tidak diperkenankan sebagai Sound Activation begitu juga Handphone atau alat yang mengeluarkan RF (Radio Frekuensi). Sound Activation hanya memiliki satu tombol aktivasi. Bila terdapat banyak tombol, yang penting hanya satu tombol aktivasi yang terlihat (yang lain harus tertutup dan tidak boleh ditekan). Bentuk dan ukuran Sound Activation bebas namun harus dapat digenggam. Sound Activation hanya memiliki satu output suara (speaker) yang terletak di satu sisi dari kotak alat. Tidak diperkenankan adanya speaker di dua sisi atau lebih dari kotak Sound Activation.
 tidak diperkenankan sebagai Sound Activation begitu juga Handphone atau alat yang mengeluarkan RF (Radio Frekuensi). Sound Activation hanya memiliki satu tombol aktivasi. Bila terdapat banyak tombol, yang penting hanya satu tombol aktivasi yang terlihat (yang lain harus tertutup dan tidak boleh ditekan). Bentuk dan ukuran Sound Activation bebas namun harus dapat digenggam. Sound Activation hanya memiliki satu output suara (speaker) yang terletak di satu sisi dari kotak alat. Tidak diperkenankan adanya speaker di dua sisi atau lebih dari kotak Sound Activation.")
22
The robot's microphone must have these characteristics:
Located on the top surface of the robot and accessible from above. Above the highest fan blade tip (the highest point the fan can reach) Less than 2 cm below any other mechanical part.
 Less than 2 cm below any other mechanical part.")
23
Start Button (Tombol Start)
Tombol start adalah tombol untuk mengaktifkan robot secara manual. menggantikan Sound Activation yang tidak berfungsi. Peserta harus menyediakan Tombol start di badan robot. Merupakan Momentary push-to-operate action: not a tog-gle switch.

24
Gambar 2. Tombol dan microphone
Microphone dan Tombol start manual STOP Tombol START Tombol STOP Microphone Berlatar belakang hijau Berlatar belakang merah Berlatar belakang biru Gambar 2. Tombol dan microphone Catatan : Robot yang memasang tombol tidak sesuai dengan ketentuan ini tidak diijinkan mengikuti kontes

25
Located on the top surface of the robot and accessible from above.
Above the highest fan blade tip (the highest point the fan can reach) Less than 2 cm below any other mechanical part. A green actuator or background. You may color the button with a marker, surround the button with a colored area, or use a colored label. The word START printed in a contrasting color on or adjacent to the button. NOTE If a robot does not have a Start Button meeting these requirements, it will be disqualified.
 Less than 2 cm below any other mechanical part. A green actuator or background. You may color the button with a marker, surround the button with a colored area, or use a colored label. The word START printed in a contrasting color on or adjacent to the button. NOTE If a robot does not have a Start Button. meeting these requirements, it will be disqualified.")
26
Power Switch The robot may also have a Power Switch that dis-connects the robot's batteries. The team may turn the robot on using the Power Switch after placing the robot on the Judge's table at the arena, but the robot must not move as a result. We recommend that robots be turned on and ready to start before being placed on the table, unless that would cause an unsafe condition. Please dis- cuss your robot's operation with the Judges if you anticipate a problem. NOTE The Power Switch cannot be the Start Button, because activating the Start Button causes the robot to begin operation.

27
Pemadaman Api Untuk memadamkan api lilin yang diperbolehkan adalah menggunakan Kipas dan/atau Extinguisher. Kipas: alat untuk memadamkan api dengan menggunakan tiupan angin. Bentuk, ukuran dan bahannya adalah bebas. Extinguisher: alat untuk memadamkan api dengan menggunakan cairan. Bentuk, ukuran dan bahannya adalah bebas. tidak boleh menggunakan cairan atau segala sesuatu yang dilarang sesuai dengan yang telah ditetapkan dalam panduan TCFFRC 2011.

29
Definisi Kaki Divisi Berkaki
Yang dimaksud dengan kaki adalah suatu bagian robot yang bila bergerak dengan pola dan urutan tertentu bersama-sama dengan kaki-kaki lainnya, dapat menggerakkan dan memindahkan badan robot. Hanya bagian dari kaki yang diperkenankan menempel dilantai ketika robot telah aktif dan ketika robot bergerak atau berjalan. Tidak ada bagian dari badan yang tidak masuk kedalam definisi kaki diperkenankan menempel di lantai misalnya penopang badan, caster dan sejenisnya. Setiap kaki memiliki minimal dua derajat kebebasan dengan kata lain memiliki minimal dua sendi atau tegasnya setiap kaki memiliki minimal dua motor/aktuator. Jumlah kaki minimal dua. Satu kaki adalah independen satu sama lainnya, artinya, tidak ada 2 kaki atau lebih yang digerakkan oleh satu motor/aktuator. Kaki tidak diperkenankan melakukan putaran 360 derajat (seperti prinsip roda berputar) untuk memindahkan badan. Akan diberikan bonus khusus bagi yang membuat robot berkaki berjenis Humanoid (gerakan kaki mirip prinsip manusia berjalan). Besarnya bonus dapat dilihat pada bagian Bonus.
 untuk memindahkan badan. Akan diberikan bonus khusus bagi yang membuat robot berkaki berjenis Humanoid (gerakan kaki mirip prinsip manusia berjalan). Besarnya bonus dapat dilihat pada bagian Bonus.")
30
Lapangan dan kelengkapannya
Lilin Dudukan lilin Alas lilin Sound Damper Cermin Furniture Alas furniture Uneven floor Bentuk dan ukuran lapangan Lantai Dinding Pintu Karpet Grid Home Alas anti slip

31
Bentuk dan Ukuran Lapangan
Lapangan/arena mensimulasikan interior dari sebuah rumah dengan 4 ruangan. Untuk KRCI 2011 penomoran ruangan seperti pada gambar Lapangan 244 cm x 244 cm, Walls: 1.9 cm thick, 27 to 34 cm tall, Bahan papan multipleks Lapangan memiliki roda agar dapat dipindah atau diputar dengan mudah. Ada 4 ruangan dengan posisi tetap, dua ruangan pintunya dapat digeser/diubah (pintu ruang 1 dan 4). Ruang 1 terdapat 2 pintu
. Ruang 1 terdapat 2 pintu.")
32
Lantai Lantai adalah bagian dari lapangan yang berfungsi sebagai sarana berjalannya robot yang terbuat dari kayu multipleks. Lantai pada divisi Beroda dan Berkaki adalah datar bila diatasnya tidak terdapat Uneven floor atau Karpet. Lantai berwarna hitam dop, kecuali yang tertutup oleh karpet. Koefisien gesek lantai tidak ditentukan tapi lantai diupayakan tidak licin.

33
Dinding Dinding adalah bagian dari lapangan berfungsi untuk membentuk sekat-sekat ruangan dan lorong. Dinding lapangan adalah berwarna putih. Akan terdapat “hanging objects” (sound damper dan cermin) yang akan membuat warna dinding menjadi tidak seluruhnya homogen.
 yang akan membuat warna dinding menjadi tidak seluruhnya homogen.")
34
Pintu merupakan suatu celah masuk ke suatu ruangan yang berukuran 46 cm yang ditandai dengan adanya garis putih di lantai selebar 2,5 cm. Posisi pintu dapat berubah-ubah pada setiap sesi pertandingan yang berlangsung tergantung hasil undian, mode ini disebut Variable Door Location.

35
Variable Door Location

36
Karpet Karpet terpasang tetap di lantai, membentuk pola dan ukuran tertentu. Fungsi karpet adalah untuk memberikan perbedaan koefisien gesek pada bagian-bagian tertentu di lantai untuk menguji kestabilan robot saat berputar atau berbelok di lantai. Karpet memiliki ketebalan maksimum 5 mm berwarna abu-abu

37
Grid Grid adalah titik-titik di lantai ruangan yang berfungsi sebagai penanda lokasi Lilin, Furniture dan Home. Titik-titik grid berdiameter kurang lebih 3 mm berwarna merah atau biru. Titik-titik grid ini dapat dibuat menggunakan spidol tebal.

38
Home Home adalah suatu lingkaran terletak di lantai berfungsi sebagai acuan titik awal dan akhir robot saat mulai menjalankan dan mengakhiri misinya. Home berbentuk lingkaran solid berdiameter 30 cm, terbuat dari kertas karton berwarna putih. Agar karton tidak bergelombang dan dapat mudah dipindah-pindah maka karton tersebut ditempelkan pada sebuah plat aluminium dengan ketebalan 1,5 s.d. 2 mm dengan diameter yang sama dengan karton. Agar plat tidak mudah bergeser maka di bawah plat tersebut dilapisi alas karet anti slip (lihat Alas anti slip).
.")
39
Orientasi Home Kemungkinan orientasi robot di Home ada 6, ditandai dengan angka 1, 2, 3, 4, 5, dan 6 searah jarum jam yang merepresentasikan sudut 0O, 60O, 120O, 180O, 240O dan 300O.

40
Arbitrary Start/Non-Arbitrary Start
Home yang berada di lorong dengan posisi tetap disebut mode Non-Arbitrary Start. Home yang berada didalam salah satu ruangan dengan posisi acak disebut mode Arbitrary Start. Non-Arbitrary Start Arbitrary Start

41
Dog Obstacle 500 g It blocks between 50% and 75% of the hallway width.
Bergeser 1 cm 50 points Melewati fail the trial. Tiap sesi lokasinya berubah

42
Lilin Fungsi lilin untuk mensimulasikan titik-titik api di suatu ruangan. Tinggi lilin (belum termasuk sumbu api) berkisar antara 15 s.d. 20 cm dengan diameter 2 s.d 3 cm. Lilin berjumlah satu buah diletakkan di salah satu ruangan dari 4 ruangan yang ada. Bila lilin telah diletakan di dudukannya (lihat bahasan berikutnya), maka yang dimaksud tinggi lilin antara 15 s.d. 20 cm adalah terhitung dari lantai sampai dengan bagian bahan lilin yang tertinggi (bukan api). Lilin diletakkan acak pada titik-titik tertentu di grid ruangan yang berjarak 10 s.d. 15 cm antar titik. Posisi lilin ditentukan melalui undian Komputer.
 berkisar antara 15 s.d. 20 cm dengan diameter 2 s.d 3 cm. Lilin berjumlah satu buah diletakkan di salah satu ruangan dari 4 ruangan yang ada. Bila lilin telah diletakan di dudukannya (lihat bahasan berikutnya), maka yang dimaksud tinggi lilin antara 15 s.d. 20 cm adalah terhitung dari lantai sampai dengan bagian bahan lilin yang tertinggi (bukan api). Lilin diletakkan acak pada titik-titik tertentu di grid ruangan yang berjarak 10 s.d. 15 cm antar titik. Posisi lilin ditentukan melalui undian Komputer.")
43
Dudukan Lilin Lilin ditempatkan pada suatu dudukan terbuat dari kayu dicat putih, berbentuk silinder dan berdiameter 5 cm dengan ketinggian 5 cm dan kedalaman lubang 4 cm. Ditengah-tengah dudukan ini terdapat lubang yang memungkinkan lilin berdiri. Dudukan lilin berjumlah satu buah.

44
Alas Lilin Robot atau sebagian badan robot harus berada pada jarak kurang dari 30 cm untuk memadamkan lilin. Akan ada alas lilin berbentuk lingkaran atau juring lingkaran solid berjari-jari 30 cm (diameter 60 cm), terbuat dari kertas karton warna putih. Agar karton tidak bergelombang dan dapat mudah dipindah-pindah ditempelkan sebuah plat aluminium dengan ukuran yang sama dengan ketebalan 1,5 s/d 2 mm. Agar plat tersebut tidak mudah bergeser maka di bawah plat tersebut dilapisi alas karet anti slip.
, terbuat dari kertas karton warna putih. Agar karton tidak bergelombang dan dapat mudah dipindah-pindah ditempelkan sebuah plat aluminium dengan ukuran yang sama dengan ketebalan 1,5 s/d 2 mm. Agar plat tersebut tidak mudah bergeser maka di bawah plat tersebut dilapisi alas karet anti slip.")
45
Alas anti slip terbuat dari campuran khusus karet dan plastik yang cukup tipis, lembut agak empuk bila ditekan dan berlubang-lubang. dipakai untuk alas meletakkan piring/sendok/gelas di washtafel sehabis dicuci, untuk alas perlengkapan mandi, alas keset, alas karpet, alas laci dan lain sebagainya. dapat dibeli di supermarket atau di toko peralatan rumah tangga dalam bentuk gulungan sepanjang 1 meter dengan lebar 40 cm, warnanya bisa bermacam-macam.

46
Bentuk-bentuk alas lilin
ada posisi-posisi yang tidak memungkinkan satu lingkaran penuh ditempatkan, misalnya posisi-posisi yang dekat dengan dinding atau posisi-posisi lain dibutuhkan alas berbentuk juring lingkaran

47
Sound damper Sound damper berfungsi mengganggu dan menguji sistem navigasi berbasis Ultrasonik. ukuran tinggi 25 cm dan panjang 45 cm terbuat dari kertas karton berwarna merah. Sound damper tidak memiliki pengunci khusus sehingga mudah bergeser. Sound Damper berjumlah 4 buah diletakkan secara acak pada tempat-tempat tertentu di dinding melalui undian Komputer.

48
Cermin Cermin berfungsi untuk menguji sistem navigasi berbasis cahaya (Infra-merah misalnya). ukuran tebal 5 mm, panjang 45 cm dan tinggi 30 cm. Cermin diberi dudukan tripleks 3 mm dengan ukuran panjang dan tinggi yang sama dengan cermin. Ketebalan maksimum cermin dan tripleks adalah 1.5 cm. Cermin mudah dapat tergeser di dinding. Cermin berjumlah 4 buah diletakkan secara acak pada tempat-tempat tertentu di dinding melalui undian Komputer.

49
Furniture Furniture berfungsi untuk mensimulasikan benda-benda yang berada disuatu ruangan dan bertujuan untuk menguji kemampuan bermanuver robot. Furniture adalah sebuah silinder berwarna kuning terang terbuat dari potongan pipa PVC/paralon berdiameter 11 cm dengan tinggi 30 cm. Silinder paralon ini kemudian dicor dengan adukan semen dan pasir supaya menjadi berat dan agar tidak mudah tergeser/jatuh jika tersenggol robot. Furniture berjumlah 4 buah yang masing-masing diletakkan di setiap ruangan, baik yang terdapat lilin maupun yang tidak. Posisi Furniture adalah acak pada titik-titik tertentu di grid ruangan. Posisi ini ditentukan melalui undian Komputer

50
Alas Furniture Di bawah furniture akan ada alas yang berfungsi untuk mendeteksi pergeseran Furniture lebih dari 5 cm dari posisi awalnya apabila ditabrak oleh robot. Alas ini berbentuk lingkaran berdiameter 21 cm terbuat dari plat aluminium (tebal 1,5 – 2 cm) yang bagian atasnya dilapisi karton berwarna hitam dop sama dengan warna lantai (R:0,G:0,B:0) dan bagian bawahnya dilapisi alas karet anti slip (lihat Alas anti slip).
 yang bagian atasnya dilapisi karton berwarna hitam dop sama dengan warna lantai (R:0,G:0,B:0) dan bagian bawahnya dilapisi alas karet anti slip (lihat Alas anti slip).")
51
Uneven floor Uneven floor merupakan suatu bentuk halangan dilantai lorong dimana fungsinya seperti sebuah “polisi tidur”. Uneven floor bertujuan untuk menghalangi laju robot dan menguji kestabilan sistem gerak robot. Uneven floor berbentuk segitiga piramida. Uneven floor terbuat dari kayu dan dicat sama seperti warna lantai yaitu hitam dop (R:0,G:0,B:0).
.")
52
Uneven floor diberi alas karet anti slip (lihat Alas anti slip) agar tidak mudah bergeser ketika dilewati robot. Uneven floor berjumlah 6 buah. Kemungkinan posisi Uneven floor ada 7 namun yang dipakai hanya 6 posisi, letaknya hanya dimungkinkan dilorong. Posisi dan arah uneven floor akan diacak oleh program komputer.

53
Persiapan Pertandingan
Persiapan pertandingan meliputi: Pengecekan robot dan kelengkapannya. Pengundian konfigurasi lapangan dan kelengkapannya. Persiapan dan penyusunan lapangan dan kelengkapannya.

54
Pengecekan robot dan kelengkapannya
Pengecekan dimensi robot. Pengecekan Sound Activation (spesifikasi bunyi, tombol, dan lain-lain). Pengecekan ada tidaknya sistem transceiver RF/Bluetooth/Wi-Fi yang dilarang di badan robot. Pengecekan metoda pemadam api (penggunaan bahan yang berbahaya, dan lain-lain). Dan lain-lain.
. Pengecekan ada tidaknya sistem transceiver RF/Bluetooth/Wi-Fi yang dilarang di badan robot. Pengecekan metoda pemadam api (penggunaan bahan yang berbahaya, dan lain-lain). Dan lain-lain.")
55
Pengundian konfigurasi lapangan dan kelengkapannya
Untuk KRPAI 2012, baik divisi Beroda maupun Berkaki seluruh mode/bonus akan diundi, peserta tidak lagi diijinkan memilih mode/bonus yang diinginkan. Peserta hanya menunggu hasil undian konfigurasi dari komputer.

56
Mulai sejak proses undian pengacakan dilakukan sampai selesai Sesi pertandingan, peserta tidak diperkenankan lagi untuk menyentuh robotnya kecuali seijin Juri/Panitia. sebelum undian, robot dan Sound Activationnya dimasukkan kedalam kontainer plastik dan ditutup. Panitia juga akan mengawasi peserta dari tindakan mencoba-coba mengirimkan data hasil undian ini ke robot melalui sarana Handphone/Bluetooth atau sejenisnya. Program Pengacakannya dapat didownload di Internet (Mailing list KRI-KRCI atau pada situs yang akan ditentukan kemudian).
.")
57
Persiapan dan penyusunan lapangan dan kelengkapannya

58
Pengacakan orientasi lapangan

59
Pertandingan Satu Sesi (Trial) untuk divisi Beroda dan Berkaki adalah satu tahap pertandingan dimana diberikan waktu maksimal 5 menit untuk bergerak dan bernavigasi di lorong atau ruangan dalam rangka mencari posisi lilin dan mematikannya secepat-cepatnya. Setelah memadamkan api, robot diberikan waktu 2 menit untuk kembali ke Home yang terhitung sejak api padam. Bila jumlah tim > 24 maka 3 menit mencari api, 1 menit kembali ke home
 untuk divisi Beroda dan Berkaki adalah satu tahap pertandingan dimana diberikan waktu maksimal 5 menit untuk bergerak dan bernavigasi di lorong atau ruangan dalam rangka mencari posisi lilin dan mematikannya secepat-cepatnya. Setelah memadamkan api, robot diberikan waktu 2 menit untuk kembali ke Home yang terhitung sejak api padam. Bila jumlah tim > 24 maka 3 menit mencari api, 1 menit kembali ke home.")
60
Retry dan Pass Retry adalah suatu upaya pengulangan Start didalam suatu SESI. Dalam setiap Sesi hanya diijinkan satu kali Retry. Retry hanya boleh diajukan ke Jury bila robot gagal berfungsi misalnya: robot tertahan di dinding, robot terguling, robot “hang” (berputar terus, berjalan bolak-balik, dan lain-lain). Retry tidak boleh diajukan pada kondisi robot salah jalan atau pada kondisi tidak berhasilnya robot memadamkan api. Ketika Retry diajukan, peserta wajib menunggu ijin/keputusan Jury. Bila Retry diijinkan maka robot akan dibawa kembali ke Home tetapi stopwatch tidak dihentikan. Saat Retry peserta tidak diperkenankan menyentuh robotnya kecuali seijin Juri. Aktivasi robot saat Retry dilakukan oleh juri. Pass adalah upaya pemberhentian Sesi oleh peserta. Pass dapat diajukan kapan saja. Pass bertujuan untuk: a) Menyelamatkan robot dari kerusakan. b) Menghemat waktu pertandingan. c) Menjadi strategi peserta.
. Retry tidak boleh diajukan pada kondisi robot salah jalan atau pada kondisi tidak berhasilnya robot memadamkan api. Ketika Retry diajukan, peserta wajib menunggu ijin/keputusan Jury. Bila Retry diijinkan maka robot akan dibawa kembali ke Home tetapi stopwatch tidak dihentikan. Saat Retry peserta tidak diperkenankan menyentuh robotnya kecuali seijin Juri. Aktivasi robot saat Retry dilakukan oleh juri. Pass adalah upaya pemberhentian Sesi oleh peserta. Pass dapat diajukan kapan saja. Pass bertujuan untuk: a) Menyelamatkan robot dari kerusakan. b) Menghemat waktu pertandingan. c) Menjadi strategi peserta.")
61
Penilaian Penilaian didasarkan atas perolehan: Bonus Penalti
Actual Time

62
Nilai Bonus Mendapat Bonus berarti mendapat pengurangan nilai Waktu
Bonus hanya akan didapatkan bila robot berhasil menjalani mode operasi tersebut. pada KRPAI 2013, peserta tidak lagi memilih Mode operasi yang diinginkan melainkan Mode operasi sudah ditetapkan dari hasil undian. Seluruh Mode operasi yang ada akan diundi. No Mode Bonus 1 Sound Activation (0.95 old) 0.80 2 Extinguisher 0.85 3 Two Legged (khusus berkaki) 0.60 4 Room Factor 1 (RF1) 1.00 5 Room Factor 2 (RF2) 6 Room Factor 3 (RF3) 0.50 7 Room Factor 4 (RF4) 0.35 8 Hanging Objects 9 Uneven Floor 10 Furniture 0.75 11 Arbitrary Start 12 Variable Door Location 0.45 13 Return Trip
 Extinguisher Two Legged (khusus berkaki) Room Factor 1 (RF1) Room Factor 2 (RF2) 6. Room Factor 3 (RF3) Room Factor 4 (RF4) Hanging Objects. 9. Uneven Floor. 10. Furniture Arbitrary Start. 12. Variable Door Location Return Trip.")
63
Actual Time Actual Time adalah waktu yang dibutuhkan robot untuk berjalan dari Home hingga memadamkan api lilin.

64
Penalti Jika robot menyentuh/menggeser dinding maka Nilai Penalti adalah 1 point atau 1 detik per 2 cm. Jika robot menyentuh lilin maka Nilai Penalti adalah 50 detik.

65
Nilai Waktu Sukses Padamkan Api
AT = Actual Time (detik). AT adalah waktu yang dibutuhkan robot untuk berjalan dari Home hingga memadamkan api lilin. PP = Penalty Points (detik). PP adalah nilai penalty yang ditambahkan jika robot menyentuh dinding (I detik per 2cm sentuh) dan atau menyentuh lilin (50 detik). RF = Room Factor. RF adalah nilai pengali jika robot berhasil melakukan SEARCH pada ruangan yang dijelajahi. Nilai RF dapat dilihat didalam sebelumnya. TS = Time Score. TS = AT + PP Maka Nilai Waktu Sukses Padamkan Api atau yang disingkat OS = Operating Score adalah: OS = TS x RF x MF
. AT adalah waktu yang dibutuhkan robot untuk berjalan dari Home hingga memadamkan api lilin. PP = Penalty Points (detik). PP adalah nilai penalty yang ditambahkan jika robot menyentuh dinding (I detik per 2cm sentuh) dan atau menyentuh lilin (50 detik). RF = Room Factor. RF adalah nilai pengali jika robot berhasil melakukan SEARCH pada ruangan yang dijelajahi. Nilai RF dapat dilihat didalam sebelumnya. TS = Time Score. TS = AT + PP. Maka Nilai Waktu Sukses Padamkan Api atau yang disingkat OS = Operating Score adalah: OS = TS x RF x MF.")
66
Nilai Waktu Gagal Padamkan Api
Jika robot tidak berhasil memadamkan lilin akan diberi score OS=600, yang APABILA: Start robot menggunakan mode Sound activation, akan diberi pengurangan score sebanyak 30 poin. Robot berhasil memasuki ruangan akan diberi pengurangan score 30 poin untuk setiap ruangan (maksimal 4 ruangan, sehingga maksimal pengurangan 120 poin). Robot mengindikasikan telah melihat api lilin (dengan cara menyalakan LED atau membuat gerakan yang dapat dianggap berusaha mencari arah api), akan diberi pengurangan score 30 poin. Robot berhasil berhenti di lingkaran putih di sekitar lilin (dengan jari-jari 30 cm) tanpa menabrak lilin akan diberi pengurangan score 30 poin. Dengan demikian besarnya pengurangan score maksimum adalah 210 poin.
. Robot mengindikasikan telah melihat api lilin (dengan cara menyalakan LED atau membuat gerakan yang dapat dianggap berusaha mencari arah api), akan diberi pengurangan score 30 poin. Robot berhasil berhenti di lingkaran putih di sekitar lilin (dengan jari-jari 30 cm) tanpa menabrak lilin akan diberi pengurangan score 30 poin. Dengan demikian besarnya pengurangan score maksimum adalah 210 poin.")
67
Penentuan Pemenang Pemenang ditentukan sebagai berikut:
A) Tim yang berhasil memadamkan api terbanyak dari 3 sesi yang disediakan. B) Bila nilai pada (A) sama, maka Tim dengan rata-rata nilai waktu terkecil.
 Tim yang berhasil memadamkan api terbanyak dari 3 sesi yang disediakan. B) Bila nilai pada (A) sama, maka Tim dengan rata-rata nilai waktu terkecil.")
68
Tambahan Persyaratan bagi peserta regional yang diundang ke tingkat nasional adalah yang masuk 3 besar dan minimal sekali memadamkan api.

69
Some possible problems you should consider
Our experience has shown that robots designed with no margin for error generally suffer from the “but it worked in our class- room / lab / arena!” syndrome. Extremely bright fluorescent illumination: 120 Hz IR interference High sound levels: the Trinity Contest has an enthusiastic crowd Reinforced concrete suboor: random magnetic field anomalies Flash photography: frequent IR and UV sensor glitches Imperfections and dirt in the arena: sensor and navigation confusion The practice arena may not be the contest arena: slight changes in all conditions

70
Checkout Table The Contest offcials will provide a Robot Checkout
Table where you can verify that your robot meets various specifcations: Overall size Start Button position, label, and color Microphone position and color Response to the Standard Sound Start Device Response to standard SPL (Sound Pres- sure Level) Frequency discrimination (2.8 and 3.5 kHz tones) General conformance to the rules
 Frequency discrimination (2.8 and 3.5 kHz. tones) General conformance to the rules.")
71
Catatan Penting 1 Bila ada aturan yang belum tercover pada panduan ini yang menyebabkan terjadi kesalah interpretasian baik sebelum maupun selama pertandingan, maka Juri berhak menentukan aturan yang berlaku. Beberapa hal baru dari aturan Internasional TCFFRC 2011 yang belum diadopsi pada KRCI 2011 antara lain: adanya asesories Coat Tree (gantungan baju yang mengandung bahan besi) dan Bonus Variable Door Location berubah menjadi 0.45. Semua ukuran yang digunakan pada aturan 2011 ini memiliki toleransi 5%. Nilai warna RGB yang diberikan hanya untuk menunjukkan referensi nilai warna yang dipakai pada standar warna di komputer. Panitia menjanjikan warna yang dipakai nanti mendekati warna referensi tersebut secara visual (bukan secara nilainya). Dengan kata lain, panitia tidak menjamin sensor warna peserta akan mendapatkan nilai warna yang sama dengan nilai warna RGB tersebut. Agar mempermudah panitia/penonton/peserta/media-massa dalam pengenalan robot, untuk keperluan dokumentasi ataupun peliputan maka pada robot diharuskan terpasang stiker/tanda pengenal Institusi masing-masing. Letaknya sebaiknya yang mudah terlihat/terbaca dari atas maupun dari kejauhan. Sebaiknya dipasang dibagian punggung dan depan robot. Pemasangan pada sisi-sisi robot yang lain diperkenankan. Bila ingin menyertakan logo sponsor, perbandingan ukuran yang disarankan adalah minimal 60:40 untuk logo Institusi dan logo Sponsor. Robot harus dapat mengantisipasi seluruh kemungkinan gangguan yang ada di lapangan pertandingan tidak terkecuali flash (blitz), sistem autofokus kamera, medan magnet speaker, cahaya lampu sorot Halogen, teriakan dan tepuk tangan penonton, musik yang keras, ketidak presisian penyusunan konfigurasi lapangan dan penempatan kelengkapan-kelengkapan lapangan oleh panitia lapangan, orientasi lapangan yang dapat bergeser, ketebalan karpet dan alas lilin, dan lain-lain.
 dan Bonus Variable Door Location berubah menjadi Semua ukuran yang digunakan pada aturan 2011 ini memiliki toleransi 5%. Nilai warna RGB yang diberikan hanya untuk menunjukkan referensi nilai warna yang dipakai pada standar warna di komputer. Panitia menjanjikan warna yang dipakai nanti mendekati warna referensi tersebut secara visual (bukan secara nilainya). Dengan kata lain, panitia tidak menjamin sensor warna peserta akan mendapatkan nilai warna yang sama dengan nilai warna RGB tersebut. Agar mempermudah panitia/penonton/peserta/media-massa dalam pengenalan robot, untuk keperluan dokumentasi ataupun peliputan maka pada robot diharuskan terpasang stiker/tanda pengenal Institusi masing-masing. Letaknya sebaiknya yang mudah terlihat/terbaca dari atas maupun dari kejauhan. Sebaiknya dipasang dibagian punggung dan depan robot. Pemasangan pada sisi-sisi robot yang lain diperkenankan. Bila ingin menyertakan logo sponsor, perbandingan ukuran yang disarankan adalah minimal 60:40 untuk logo Institusi dan logo Sponsor. Robot harus dapat mengantisipasi seluruh kemungkinan gangguan yang ada di lapangan pertandingan tidak terkecuali flash (blitz), sistem autofokus kamera, medan magnet speaker, cahaya lampu sorot Halogen, teriakan dan tepuk tangan penonton, musik yang keras, ketidak presisian penyusunan konfigurasi lapangan dan penempatan kelengkapan-kelengkapan lapangan oleh panitia lapangan, orientasi lapangan yang dapat bergeser, ketebalan karpet dan alas lilin, dan lain-lain.")
72
Catatan Penting 2 Harus diperhitungkan adanya robot yang menggunakan teknik pemadaman menggunakan cairan atau bahkan serbuk pemadam, yang dapat mengubah warna lantai arena. Panitia akan berusaha sedapat mungkin membersihkan lantai arena dari kotoran semacam ini, tapi tidak dapat menjanjikan kondisi ideal. Koefisian gesek lantai dalam hal ini tidak didefinisikan. Peserta dilarang melengkapi robotnya dengan sistem pemancar-penerima Radio Frekuensi (RF)/Bluetooth/Wi-Fi atau sejenisnya. Panitia berhak untuk memeriksa robot peserta baik sebelum, selama ataupun sesudah pertandingan. Peserta selama menjalani sesi pertandingan di lapangan tidak diperkenankan memegang Handphone atau alat apapun untuk alasan apapun, juga tidak diperkenankan menyimpan tangannya di dalam saku jaket atau saku celana. Panitia akan mengantisipasi kemungkinan peserta/supporter yang meremote dari jauh data tentang konfigurasi lapangan atau posisi api ke badan robot dengan fasilitas Bluetooth yang terdapat di Handphone ataupun Wi-Fi setelah undian konfigurasi lapangan dilakukan, dengan menggunakan sarana pemantau spectrum Bluetooth/Wi-Fi. Panitia berupaya untuk mengeliminir segala bentuk gangguan yang disengaja baik oleh peserta maupun penonton dalam mendukung pertandingan yang fair. Peserta harus dapat menunjukkan “Spirit of the Game” yang baik dan sikap “Fair play”. Peserta harus mematuhi Juri, Wasit dan Peraturan yang berlaku. Kecurangan dalam bentuk apapun akan ditindak sesuai dengan peraturan yang berlaku atau dikenakan sanksi sesuai dengan yang diputuskan oleh dewan Juri.
/Bluetooth/Wi-Fi atau sejenisnya. Panitia berhak untuk memeriksa robot peserta baik sebelum, selama ataupun sesudah pertandingan. Peserta selama menjalani sesi pertandingan di lapangan tidak diperkenankan memegang Handphone atau alat apapun untuk alasan apapun, juga tidak diperkenankan menyimpan tangannya di dalam saku jaket atau saku celana. Panitia akan mengantisipasi kemungkinan peserta/supporter yang meremote dari jauh data tentang konfigurasi lapangan atau posisi api ke badan robot dengan fasilitas Bluetooth yang terdapat di Handphone ataupun Wi-Fi setelah undian konfigurasi lapangan dilakukan, dengan menggunakan sarana pemantau spectrum Bluetooth/Wi-Fi. Panitia berupaya untuk mengeliminir segala bentuk gangguan yang disengaja baik oleh peserta maupun penonton dalam mendukung pertandingan yang fair. Peserta harus dapat menunjukkan Spirit of the Game yang baik dan sikap Fair play . Peserta harus mematuhi Juri, Wasit dan Peraturan yang berlaku. Kecurangan dalam bentuk apapun akan ditindak sesuai dengan peraturan yang berlaku atau dikenakan sanksi sesuai dengan yang diputuskan oleh dewan Juri.")
73
Contoh-contoh Pertandingan
Lihat Clip Video Divisi Beroda. Lihat Clip Video Divisi Berkaki. Lihat Clip Video Pertandingan Internasional.

74
Contoh-contoh Pertandingan
Lihat Clip Video

75
Contoh foto lapangan

76
Selamat Membuat Robot KRPAI 2013!
Terimakasih… Selamat Membuat Robot KRPAI 2013!

Presentasi serupa