Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
KONSEP DAN PENGUJIAN UNIT ROOT
Pertemuan 3 - Time Series KONSEP DAN PENGUJIAN UNIT ROOT OLEH: FITRI KARTIASIH, S.ST, S.E, M.Si SEKOLAH TINGGI ILMU STATISTIK

2
Proses stokastik dan kestasioneran data time series
Jika 𝑌 𝑡 adalah pengamatan pada waktu t dan 𝑌 𝑡 adalah peubah acak (random variable), maka rangkaian peubah acak 𝑌 𝑡 adalah 𝑌 1 , 𝑌 2 ,…, 𝑌 𝑡 yang disebut proses stokastik. Proses stokastik didefinisikan sebagai suatu proses yang menghasilkan rangkaian nilai- nilai peubah acak yang menggambarkan perilaku data pada berbagai kondisi. Proses stokastik dapat bersifat stasioner dan akan menghasilkan time series yang bersifat stationer, begitu juga sebaliknya.
, maka rangkaian peubah acak 𝑌 𝑡 adalah 𝑌 1 , 𝑌 2 ,…, 𝑌 𝑡 yang disebut proses stokastik. Proses stokastik didefinisikan sebagai suatu proses yang menghasilkan rangkaian nilai- nilai peubah acak yang menggambarkan perilaku data pada berbagai kondisi. Proses stokastik dapat bersifat stasioner dan akan menghasilkan time series yang bersifat stationer, begitu juga sebaliknya.")
3
Stasioner Data time series dikatakan stasioner jika rata–rata, varian dan covarian dari variabel–variabel tersebut seluruhnya tidak dipengaruhi oleh waktu atau dengan kata lain konstan. 1. Rata-rata series konstan untuk setiap periode pengamatan, dapat dituliskan sbb: E(Yt) = untuk setiap t 2. Varians atau ragam series konstan untuk setiap periode pengamatan, dapat dituliskan sbb: Var (Yt) = E(Yt - )2 = 2 untuk setiap t 3. Covarians dua series konstan untuk setiap periode pengamatan, dapat dituliskan sbb: Cov (Yt , Yt-k) = E[(Yt - )(Yt-k - )] = k untuk setiap t Data stationer dapat juga dikatakan sebagai data yang tidak mengandung unsur trend.
 = untuk setiap t. 2. Varians atau ragam series konstan untuk setiap periode pengamatan, dapat dituliskan sbb: Var (Yt) = E(Yt - )2 = 2 untuk setiap t. 3. Covarians dua series konstan untuk setiap periode pengamatan, dapat dituliskan sbb: Cov (Yt , Yt-k) = E[(Yt - )(Yt-k - )] = k untuk setiap t. Data stationer dapat juga dikatakan sebagai data yang tidak mengandung unsur trend.")
4
Mengapa stationary time series penting
Jika data time series tidak stasioner, maka hanya dapat mempelajari perilaku data untuk periode waktu under consideration, tidak bisa untuk forecasting (peramalan) Data time series yang tidak stasioner juga bisa menimbulkan spurious regression (regresi semu atau palsu), ditandai dengan nilai R2 yang tinggi dan t-stat, F-stat yang signifikan tetapi dw relatif kecil < 0.5
 Data time series yang tidak stasioner juga bisa menimbulkan spurious regression (regresi semu atau palsu), ditandai dengan nilai R2 yang tinggi dan t-stat, F-stat yang signifikan tetapi dw relatif kecil < 0.5.")
5
Non Stationary Stochastic Processes (Random Walk)
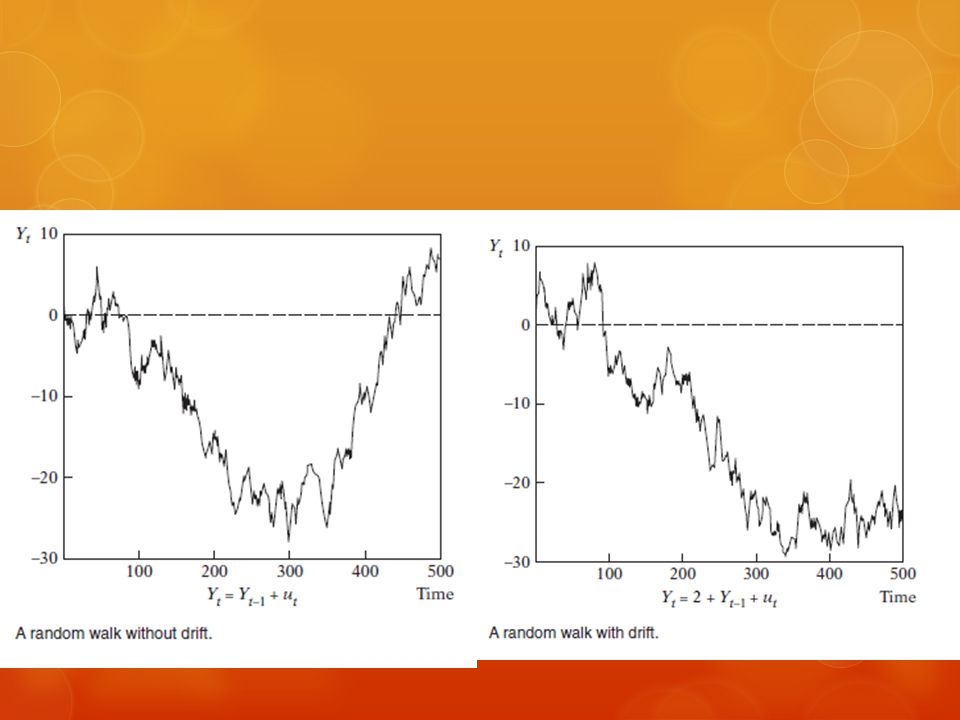
Random Walk merupakan model time series stokastik yang paling sederhana, dan merupakan contoh klasik dari model yang tidak stasioner. Ada dua bentuk random walk, yaitu: Random walk tanpa intersep Random walk dengan intersep 1. Random Walk Tanpa Intersep (Random walk without drift) Asumsi pada model ini adalah perubahan nilai Yt yang berurutan berdasarkan suatu distribusi probabilitas dengan mean 0. Dengan demikian, modelnya dapat dinyatakan dalam bentuk: Yt = Yt-1 + ut; atau Yt - Yt-1 = ut; E(ut) = 0; E (utus) = 0; t s Dimana: ut adalah error yang “white noise” atau “purely random”, dengan mean = 0 dan varian = σ2.
 Asumsi pada model ini adalah perubahan nilai Yt yang berurutan berdasarkan suatu distribusi probabilitas dengan mean 0. Dengan demikian, modelnya dapat dinyatakan dalam bentuk: Yt = Yt-1 + ut; atau Yt - Yt-1 = ut; E(ut) = 0; E (utus) = 0; t s. Dimana: ut adalah error yang white noise atau purely random , dengan mean = 0 dan varian = σ2.")
6
Model diatas juga dapat diartikan bahwa nilai Y pada waktu ke-t sama dengan nilai Y pada waktu ke-t-1 ditambah random. Bukti random walk tidak stasioner: Model random walk diatas dapat ditulis dengan: Y1 = Y0 + u1. Y2 = Y1 + u2 = Y0 + u1 + u2. Y3 = Y2 + u3 = Y0 + u1 + u2 + u3. Dengan demikian: Yt = Y0 + Σut. Sehingga: E(Yt ) = E(Y0 + Σut) = E(Y0 ) + E(Σut) Y0 adalah konstanta, sehingga nilai harapannya konstan, yaitu: Y0. ut adalah “white noise”, sehingga nilai harapannya = 0. Jadi: E(Yt ) = E(Y0 + Σut) = E(Y0 ) + E(Σut) = Y0 + 0 = Y0. Dengan demikian dapat disimpulkan bahwa rata-rata random walk tanpa intersep adalah konstan.
 = E(Y0 + Σut) = E(Y0 ) + E(Σut) Y0 adalah konstanta, sehingga nilai harapannya konstan, yaitu: Y0. ut adalah white noise , sehingga nilai harapannya = 0. Jadi: E(Yt ) = E(Y0 + Σut) = E(Y0 ) + E(Σut) = Y0 + 0 = Y0. Dengan demikian dapat disimpulkan bahwa rata-rata random walk tanpa intersep adalah konstan.")
7
Sekarang kita lihat varian-nya, yaitu:
V(Yt ) = V(Y0 + Σut) = V(Y0 ) + V(Σut) Y0 adalah konstanta, sehingga varian-nya = 0. ut adalah “white noise”, sehingga variannya = σ2. Jadi: V(Yt ) = V(Y0 + Σut) = V(Y0 ) + V(Σut) = 0 + Σ σ2 = t σ2. 2. Random Walk dengan Intersep (Random walk with drift) Model: Yt = Yt-1 + d + ut Pembuktian: Y1 = Y0 + d + u1 Y2 = Y1 + d + u2 = Y0 + d + d + u1 + u2 Yt = Y0 + t d + Σut Dengan demikian: E(Yt = Y0 + t d + Σut) = Y0 + t d V(Yt = Y0 + t d + Σut) = t σ2.
 = V(Y0 + Σut) = V(Y0 ) + V(Σut) Y0 adalah konstanta, sehingga varian-nya = 0. ut adalah white noise , sehingga variannya = σ2. Jadi: V(Yt ) = V(Y0 + Σut) = V(Y0 ) + V(Σut) = 0 + Σ σ2 = t σ2. 2. Random Walk dengan Intersep (Random walk with drift) Model: Yt = Yt-1 + d + ut. Pembuktian: Y1 = Y0 + d + u1. Y2 = Y1 + d + u2 = Y0 + d + d + u1 + u2. Yt = Y0 + t d + Σut. Dengan demikian: E(Yt = Y0 + t d + Σut) = Y0 + t d. V(Yt = Y0 + t d + Σut) = t σ2.")
9
Pemeriksaan Kestasioneran Data Time Series
Terdapat 3 cara yang umum digunakan dalam melakukan pendugaan terhadap kestasioneran data, yaitu: Melihat trend data dalam grafik Menggunakan autokorelasi dan correlogram Uji akar-akar unit (unit roots test) a. Uji Dickey- Fuller (DF Test) b. Uji Augmented Dickey- Fuller (ADF Test) c. Uji Philips-Perron (PP Test)
 a. Uji Dickey- Fuller (DF Test) b. Uji Augmented Dickey- Fuller (ADF Test) c. Uji Philips-Perron (PP Test)")
10
1. Pemeriksaan Kestasioneran dengan Trend Data
Plot data yang stasioner pada nilai tengah dan varians Plot data yang tidak stasioner pada nilai tengah, tapi stasioner pada varians

11
Plot data yang tidak stasioner pada nilai tengah maupun varians
Plot data yang stasioner pada nilai tengah, tapi tidak stasioner pada varians Plot data yang tidak stasioner pada nilai tengah maupun varians

12
Dari Plot data time series di atas dapat dilihat GDP menunjukkan tren meningkat. Ini merupakan indikasi bahwa data GDP tidak stasioner

13
2a. Pemeriksaaan Kestasioneran: Correlogram
Correlogram of white noise error term u. AC = autocorrelation, PAC = partial autocorrelation, Q-Stat = Q statistic, Prob = probability.

14
Correlogram of a random walk time series.

15
Pada correlogram uji ini digambarkan dengan: garis putus-putus
Kelemahan: Terkadang timbul keraguan dalam memutuskan stasioner atau tidak. Perlu uji formal Unit Root Test

16
2b. Pemeriksaaan Kestasioneran: Uji Signifikansi Autokorelasi (ACF)
Signifikan atau tidaknya nilai autokorelasi melalui pengujian standar error (Se). Misalnya dengan taraf nyata α= 5% untuk ρk adalah: H0: ρk = 0 (data stasioner) H0: ρk ≠ 0 (data tidak stasioner) k= lag
. Misalnya dengan taraf nyata α= 5% untuk ρk adalah: H0: ρk = 0 (data stasioner) H0: ρk ≠ 0 (data tidak stasioner) k= lag.")
17
Uji Unit Root 1. Dickey-Fuller test
Dikenalkan oleh David Dickey dan Wayne Fuller. Perhatikan model berikut: Yt = ρ Yt-1 + ut Jika ρ = 1, maka model menjadi random walk tanpa intersep. Disini kita akan menghadapi masalah dimana varian Yt tidak stasioner. Dengan demikian Yt dapat disebut mengandung “unit root” atau data tidak stasioner. Bila persamaan diatas dikurangi pada Yt-1 sisi kanan dan kiri, maka persamaannya menjadi: Yt - Yt-1= ρ Yt-1 - Yt-1+ ut ∆ Yt = (ρ-1) Yt-1 + ut Atau dapat ditulis dengan: (model tanpa intersep dan trend) ∆ Yt = δ Yt-1 + ut
 Yt-1 + ut. Atau dapat ditulis dengan: (model tanpa intersep dan trend) ∆ Yt = δ Yt-1 + ut.")
18
H1: δ < 0 ; tidak ada akar-akar unit (stasioner)
Dari persamaan tersebut dapat dibuat hipotesis: Jika kita tidak menolak hipotesis δ = 0, maka ρ = 1. Artinya kita memiliki unit root, dimana data time series Yt tidak stasioner. Uji signifikansi terhadap koefisien regresi dapat dilakukan dengan Uji-t. Sayangnya dengan hipotesis tersebut, nilai Uji-t tidak mengikuti distribusi t sekalipun dalam sampel besar. Tetapi Dickey-Fuller telah membuktikan bahwa Uji-t terhadap hipotesis diatas mengikuti statistik 𝜏 (tau). Statistik ini selanjutnya dikembangkan oleh Mc. Kinnon. Selain model diatas, pengujian ini juga dapat dilakukan dengan menggunakan beberapa model berikut: Model dengan intersep: ∆ Yt = β1 + δ Yt-1 + ut Model dengan intersep dan trend (slope) ∆ Yt = β1 + β2 t + δ Yt-1 + ut H0: δ = 0 ; ada akar-akar unit (tidak stasioner) H1: δ < 0 ; tidak ada akar-akar unit (stasioner) β1 adalah intersep / konstanta t adalah trend deterministik
. Statistik ini selanjutnya dikembangkan oleh Mc. Kinnon. Selain model diatas, pengujian ini juga dapat dilakukan dengan menggunakan beberapa model berikut: Model dengan intersep: ∆ Yt = β1 + δ Yt-1 + ut. Model dengan intersep dan trend (slope) ∆ Yt = β1 + β2 t + δ Yt-1 + ut. H0: δ = 0 ; ada akar-akar unit (tidak stasioner) H1: δ < 0 ; tidak ada akar-akar unit (stasioner) β1 adalah intersep / konstanta. t adalah trend deterministik.")
19
Jadi, DF diestimasi untuk 3 bentuk random walk yang berbeda, yaitu
Yt random walk Yt = Yt-1 + t Yt random walk with drift Yt = 1+ Yt-1 + t Yt random walk with drift around a stochastic trend Yt = 1+ 2t + Yt-1 + t

20
2. Augmented Dickey-Fuller (ADF) Test.
Model-model sebelumnya mengasumsikan ut tidak berkorelasi Hampir tidak mungkin. Untuk mengantisipasi adanya korelasi tersebut, Dickey-Fuller mengembangkan pengujian diatas dengan sebutan: Augmented Dickey-Fuller (ADF) Test. Formulasinya adalah sebagai berikut: ∆ Yt = β1 + β2 t + δ Yt-1 + 𝛼1 ∆ Yt-1 + 𝛼 2 ∆ Yt 𝛼 m ∆ Yt-m + ut Atau dapat ditulis dengan: Dimana m adalah panjangnya lag yang digunakan.
 Test. Formulasinya adalah sebagai berikut: ∆ Yt = β1 + β2 t + δ Yt-1 + 𝛼1 ∆ Yt-1 + 𝛼 2 ∆ Yt 𝛼 m ∆ Yt-m + ut. Atau dapat ditulis dengan: Dimana m adalah panjangnya lag yang digunakan.")
21
Model dengan intersep (β1) dan trend (β2), sebagaimana model diatas.
Berdasarkan model tersebut kita dapat memilih tiga model yang akan digunakan untuk melakukan Uji ADF, yaitu: Model dengan intersep (β1) dan trend (β2), sebagaimana model diatas. Model yang hanya intersep saja (β1), yaitu: Yt = 𝜷 𝟏 +Yt-1 + 𝜶 1Yt-1 + 𝜶 2Yt 𝜶 m Yt-m + ut 3. Model tanpa intersep dan trend (slope), yaitu: Yt = Yt-1 + 𝜶1Yt-1 + 𝜶 2Yt 𝜶 mYt-m + ut Penghitungan manual cukup sulit EViews
 dan trend (β2), sebagaimana model diatas. Model yang hanya intersep saja (β1), yaitu: Yt = 𝜷 𝟏 +Yt-1 + 𝜶 1Yt-1 + 𝜶 2Yt 𝜶 m Yt-m + ut. 3. Model tanpa intersep dan trend (slope), yaitu: Yt = Yt-1 + 𝜶1Yt-1 + 𝜶 2Yt 𝜶 mYt-m + ut. Penghitungan manual cukup sulit EViews.")
22
How… Jika t-statistics dari koefisien (disebut t-ADF)
lebih kecil secara absolut dari Critical Value McKinnon (1%, 5%, 10%), artinya tidak signifikan sehingga terima H0: ada akar-akar unit. Variabel tersebut tidak stasioner. lebih besar secara absolut dari Critical Value McKinnon (1%, 5%, 10%), artinya signifikan sehingga tolak H0:tidak ada akar-akar unit. Variabel tersebut stasioner.
, artinya tidak signifikan sehingga terima H0: ada akar-akar unit. Variabel tersebut tidak stasioner. lebih besar secara absolut dari Critical Value McKinnon (1%, 5%, 10%), artinya signifikan sehingga tolak H0:tidak ada akar-akar unit. Variabel tersebut stasioner.")
23
ADF Test Statistic 1% Critical Value* 5% Critical Value 10% Critical Value *MacKinnon critical values for rejection of hypothesis of a unit root. Augmented Dickey-Fuller Test Equation Dependent Variable: D(ISAT) Method: Least Squares Sample(adjusted): 1/03/2002 8/16/2002 Included observations: 162 after adjusting endpoints Variable Coefficient Std. Error t-Statistic Prob. ISAT(-1) 0.0358 D(ISAT(-1)) 0.1676 C 0.0583 @TREND(1/01/2002) 0.2373 R-squared Mean dependent var Adjusted R-squared S.D. dependent var S.E. of regression Akaike info criterion Sum squared resid Schwarz criterion Log likelihood F-statistic Durbin-Watson stat Prob(F-statistic)
 Method: Least Squares. Sample(adjusted): 1/03/2002 8/16/2002. Included observations: 162 after adjusting endpoints. Variable. Coefficient. Std. Error. t-Statistic. Prob. ISAT(-1) D(ISAT(-1)) C R-squared Mean dependent var Adjusted R-squared S.D. dependent var S.E. of regression Akaike info criterion Sum squared resid Schwarz criterion Log likelihood F-statistic Durbin-Watson stat Prob(F-statistic)")
24
Transformasi Data Tidak Stasioner Menjadi Stasioner
Metode: pembedaan (difference). Perhatikan model berikut: Yt = β1 + β2 t + β3 Yt-1 + ut Jika: β1 = 0, β2 = 0, dan β3 = 1, maka modelnya menjadi: Yt = Yt-1 + ut Telah kita ketahui bahwa model tersebut adalah Random Walk tanpa intersep, yang tidak stasioner. Akan tetapi, bila model ditulis dengan: Yt - Yt-1 = ut Atau ∆ Yt = ut Sehingga, E(∆ Yt) = 0, dan Var(∆ Yt) = σ2, maka model tersebut menjadi stasioner. Proses inilah yang disebut dengan proses pembedaan stasioner (differencing)
. Perhatikan model berikut: Yt = β1 + β2 t + β3 Yt-1 + ut. Jika: β1 = 0, β2 = 0, dan β3 = 1, maka modelnya menjadi: Yt = Yt-1 + ut. Telah kita ketahui bahwa model tersebut adalah Random Walk tanpa intersep, yang tidak stasioner. Akan tetapi, bila model ditulis dengan: Yt - Yt-1 = ut. Atau. ∆ Yt = ut. Sehingga, E(∆ Yt) = 0, dan Var(∆ Yt) = σ2, maka model tersebut menjadi stasioner. Proses inilah yang disebut dengan proses pembedaan stasioner (differencing)")
25
Jika β1 ≠ 0, β2 = 0, dan β3 = 0, maka modelnya menjadi:
Yt = β1 + Yt-1 + ut Model tersebut adalah Random Walk dengan intersep, yang tidak stasioner. Bila model ditulis dengan: Yt - Yt-1 = β1 + ut Atau ∆ Yt = β1 + ut Maka: E(∆ Yt) = E (β1 + ut) = β1 Dan Var(∆ Yt) = Var (β1 + ut) = σ2. Kita lihat bahwa baik rata-rata maupun varian telah konstan, yang berarti ∆ Yt telah stasioner. Berarti persamaan ini juga merupakan proses pembedaan stasioner, karena ketidakstasioneran Yt dapat dieliminasi pada pembedaan pertama (first difference)
 = E (β1 + ut) = β1. Dan. Var(∆ Yt) = Var (β1 + ut) = σ2. Kita lihat bahwa baik rata-rata maupun varian telah konstan, yang berarti ∆ Yt telah stasioner. Berarti persamaan ini juga merupakan proses pembedaan stasioner, karena ketidakstasioneran Yt dapat dieliminasi pada pembedaan pertama (first difference)")
26
ADF Test Statistic 1% Critical Value* 5% Critical Value 10% Critical Value *MacKinnon critical values for rejection of hypothesis of a unit root. Augmented Dickey-Fuller Test Equation Dependent Variable: D(ISAT,2) Method: Least Squares Date: 09/10/04 Time: 14:25 Sample(adjusted): 1/04/2002 8/16/2002 Included observations: 161 after adjusting endpoints Variable Coefficient Std. Error t-Statistic Prob. D(ISAT(-1)) 0.0000 D(ISAT(-1),2) 0.5429 C 0.1782 @TREND(1/01/2002) 0.4455 R-squared Mean dependent var Adjusted R-squared S.D. dependent var S.E. of regression Akaike info criterion Sum squared resid Schwarz criterion Log likelihood F-statistic Durbin-Watson stat Prob(F-statistic)
 Method: Least Squares. Date: 09/10/04 Time: 14:25. Sample(adjusted): 1/04/2002 8/16/2002. Included observations: 161 after adjusting endpoints. Variable. Coefficient. Std. Error. t-Statistic. Prob. D(ISAT(-1)) D(ISAT(-1),2) C R-squared Mean dependent var Adjusted R-squared S.D. dependent var S.E. of regression Akaike info criterion Sum squared resid Schwarz criterion Log likelihood F-statistic Durbin-Watson stat Prob(F-statistic)")
27
Pemeriksaaan Kestasioneran: Uji Akar Unit (PP-Test)
Philip-Perron mengikuti prosedur DF secara umum dengan memerhatikan asumsi distribusi sisaan e (bebas stokastik dan varians konstan) Nilai -statistik dari uji PP (Philip-Perron) dapat dihitung sbb: Dimana: adalah spektrum dari ΔYt pada frekuensi nol, rj adalah fungsi autokorelasi pada lag j, t0 adalah -statistik pada θ, 𝜎 𝜃 adalah standar error dari θ , dan σ adalah standar error uji regresi. Prosedur uji PP dapat diaplikasikan melalui cara yg sama dengan uji DF.
 Nilai -statistik dari uji PP (Philip-Perron) dapat dihitung sbb: Dimana: adalah spektrum dari ΔYt pada frekuensi nol, rj adalah fungsi autokorelasi pada lag j, t0 adalah -statistik pada θ, 𝜎 𝜃 adalah standar error dari θ , dan σ adalah standar error uji regresi. Prosedur uji PP dapat diaplikasikan melalui cara yg sama dengan uji DF.")
Presentasi serupa








, Ko-Integrasi, dan ECM>")

 SEKOLAH TINGGI ILMU STATISTIK>")

>")


>")
>")

>")
