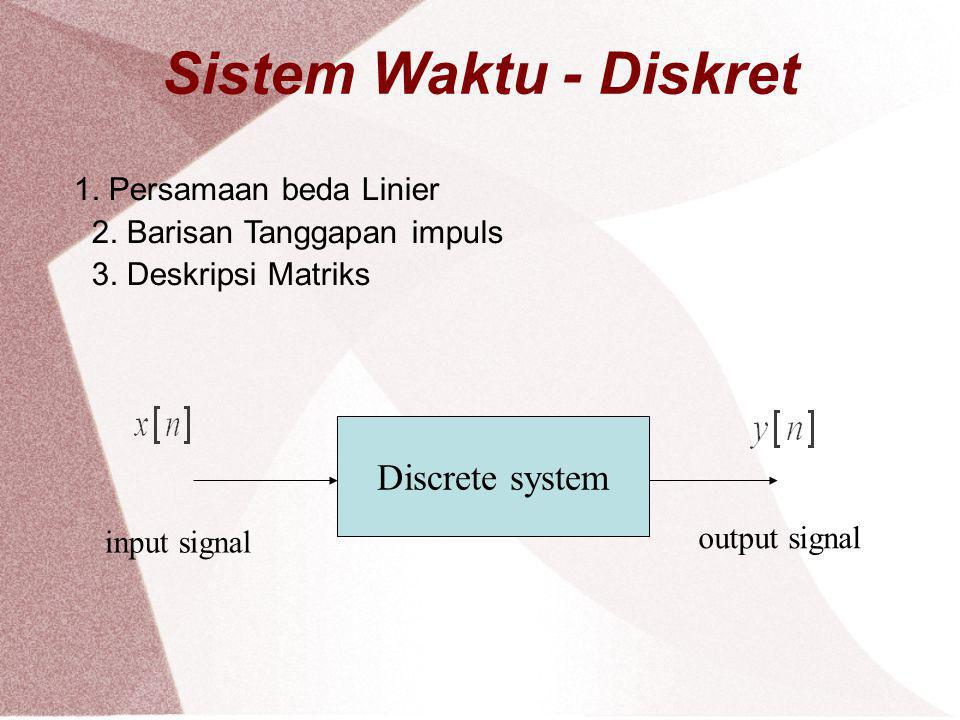
Sistem Waktu - Diskret Discrete system 1. Persamaan beda Linier 2. Barisan Tanggapan impuls 3. Deskripsi Matriks Discrete system input signal output signal
Persamaan Beda Linier Sistem waktu Diskret Linier : mentransformasikan barisan masukan { uk } kedalam barisan keluaran { yk } Contoh : Bentuklah anggota ke k barisan keluran yk dengan: menambahkan secara bersamaan masukan uk 2 kali masukan sebelumnya uk-1 dan 3 kali masukan yang tertunda dua kali uk-2 Jika barisan masukan {1,0,1,2,0,0,...} maka keluarannya adalah { 1,2,4,4,7,6,0, ...}
Persamaan Beda Linier u[1] =1 , u[0] = 0, u[-1] u(k)={1,0,1,2,0,0,...}
Persamaan Beda Linier
Persamaan Beda Linier Output : { 1,2,4,4,7,6,0,...} Input : { 1,0,1,2,0,0,...}
Persamaan Beda Linier Diagram Blok :
Persamaan Beda Linier Sinyal Sinyal masukan Sinyal keluaran
Persamaan Beda Linier Soal : Tentukan : 1. Blok diagram Persamaannya 2. Sinyal masukan dan keluaran sistem jika masukannya adalah {1,0,0,1/2,2,1,0,0}