Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
Pemodelan dan Simulasi Sistem Kontinu linear
Nama : Widiya Oktaviani Npm :

2
Konsep kunci yang yang diperkenalkan pada Bab 6 ini adalah bahwa pencocokan (matching) dinamika suatu persamaan diferens dengan dinamika persamaan diferensial. Yaitu, penekanan pada menentukan diferns yang mempunyai akar (root), kutub (pole), nol (zero) ,nilai akhir dan fasa (phase) sama dengan persamaan diferensial kontinu yang bersangkutan.
, kutub (pole), nol (zero) ,nilai akhir dan fasa (phase) sama dengan persamaan diferensial kontinu yang bersangkutan..")
3
Turunan persamaan differens dengan cara substitusi integrasi numerik
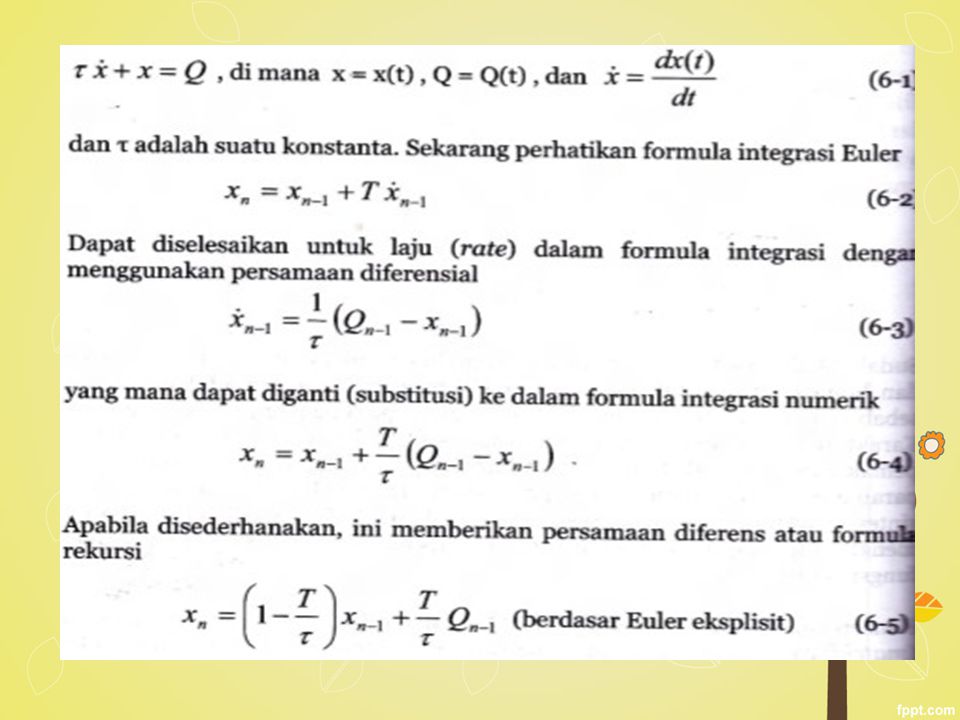
Ada beberapa formulasi integrasi klasik, antara lain : formula integrasi Euler, integrasi segiempat, integrasi trapesium, integrasi T, dan sejumlah formula prediktor-korektor untuk integrasi numerik persamaan diferensial. Cara lain untuk menggunakan formula integrasi numerik adalah dengan membentuk suatu persamaan diferens. Perhatikan persamaan diferensial koefisien konstan orde satu berikut.

5
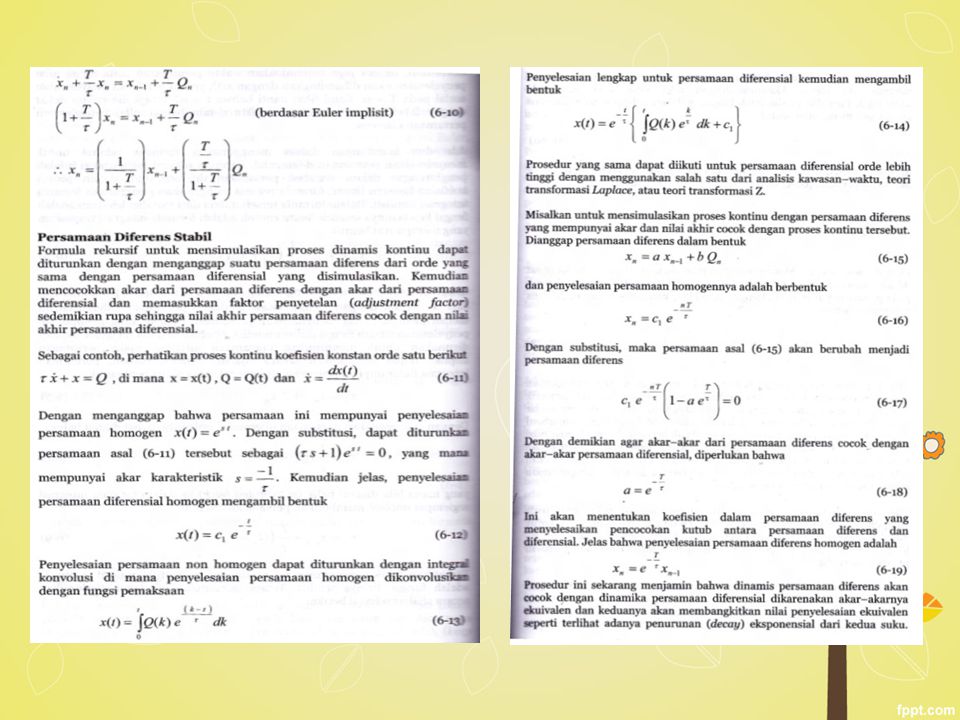
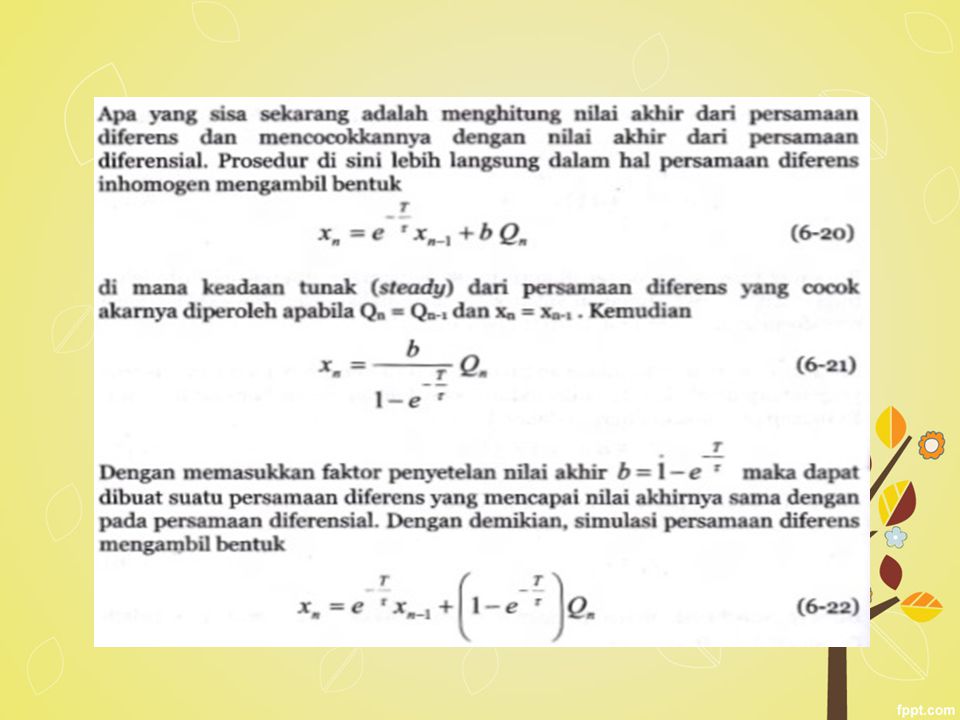
Ada dua keuntungan dalam menggunakan formula rekursi untuk menyelesaikan persamaan diferensial. Formula rekursi mengurangi jumlah penghitungan dalam simulasi persamaan diferens, dan dalam proses koefisiensi konstan linear, formulasi rekursi mengizinkan penggunaan formula integrasi implisit. Suatu contoh adalah formula integrasi trapesium yang mempunyai bentuk. Perhatikan integrasi Euler implisit (integrasi segiempat), yang mana berbentuk.
, yang mana berbentuk.")
6
Dengan menggunakan persamaan diferensial orde satu, dapat dilihat bahwa
yang mana bila diganti balik ( subsituted back ) ke dalam formula integrasi segiempat implisit memberikan persamaan diferens. Perhatikan bahwa persamaan ini masih dalam bentuk implisit yaitu Xn adalah fungsi dirinya sendiri. Tetapi persamaan ini dapat diselesaikan secara aljabar sebagai berikut.
 ke dalam formula integrasi segiempat implisit memberikan persamaan diferens. Perhatikan bahwa persamaan ini masih dalam bentuk implisit yaitu Xn adalah fungsi dirinya sendiri. Tetapi persamaan ini dapat diselesaikan secara aljabar sebagai berikut.")
9
Ada suatu pembatasan dalam penggunaan persamaan diferens simulasi tersebut. Jelas sistem kontinu orde dua dapat mempunyai tiga karakteristik dinamik berbeda : Kedua akar sistem adalah nyata(real) dan sama Kedua akar sistem adalah nyata dan tidak sama Kedua akar sistem adalah komplek Dinamika dari sistem kontinu orde dua dengan akar kompleks adalah berosilasi teredam secara alamiah dan tanggapan sistem dengan akar nyata adalah dengan tidak berosilasi meskipun teredam.
 dan sama. Kedua akar sistem adalah nyata dan tidak sama. Kedua akar sistem adalah komplek. Dinamika dari sistem kontinu orde dua dengan akar kompleks adalah berosilasi teredam secara alamiah dan tanggapan sistem dengan akar nyata adalah dengan tidak berosilasi meskipun teredam.")
10
6.1 Simulasi sistem fisika listrik Rc

11
Gambar 6-2 berikut memperlihatkan diagram blok fungsi transfer sistem orde satu rangkaian listrik RC. Click

12
6.2 Simulasi Sistem Fisika Listrik RLC
Perhatikan sistem orde dua rangkaian listrik RLC seperti terlihat pada gambar 6-4 dibawah ini

13
Click..\PRES KE 2\06_linear\04_rlc_14nov08\Debug\bsrte.exe

14
6.3 Simulasi Sistem Fisika Mekanika massa Pegas Peredam
Perhatikan sistem orde dua mekanika massa pegas peredam seperti terlihat pada gambar 6-7 dibawah ini.

15
Click

16
6.4 Simulasi Sistem Dinamis Longitudinal Pesawat Terbang Boeing 747
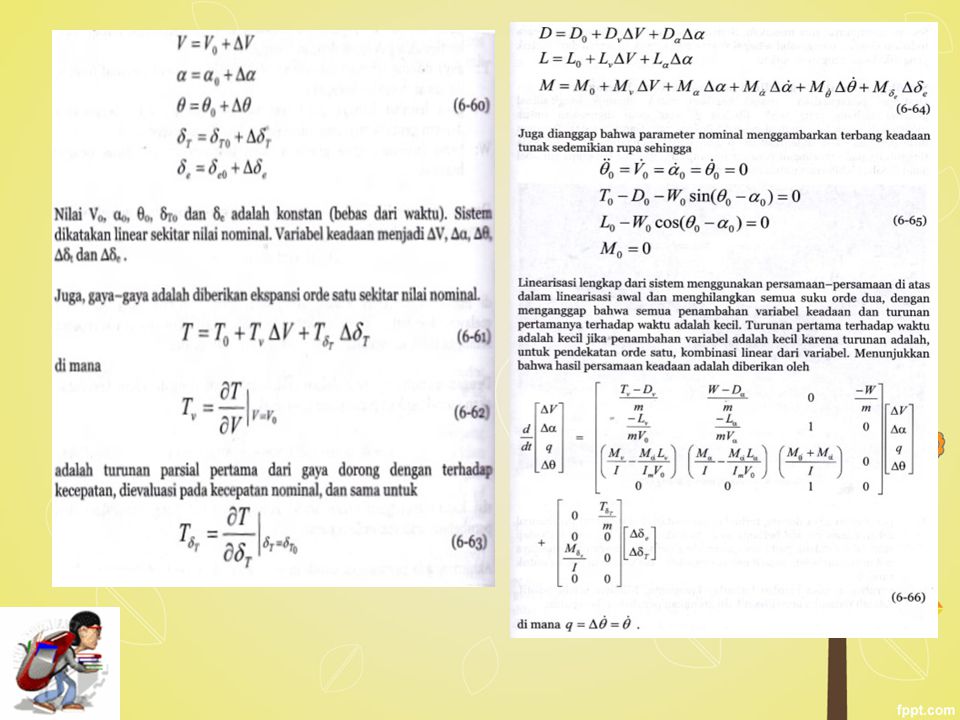
6.4.1 Linearisasi Model Dinamis Longitudinal Pesawat Terbang

18
Simulasi Dinamis Longitudinal pesawat terbang boeing 747
Deskripsi penambahan variabel keadaan untuk dinamik longitudinal pesawat terbang yang telah dibahas di atas akan digunakan untuk mengamati gerak longitudinal pesawat boeing 747. turunan orde pertama yang didefinisikan di atas dapat mengambil nilai berbeda tergantung pada rancangan pesawat terbang.

19
6.4.2 Dinamika Short Period Pertama, perhatikan suatu sistem yang disederhanakan dimana dianggap bahwakecepatan tidak berubah selama manuver. tanggapan osilasi karakteristik ini berhubungan dengan apa yang dikenal dengan dinamika periode singkat(short period) dari tanggapan longitudinal pesawat terbang. Click
 dari tanggapan longitudinal pesawat terbang. Click.")
20
6.4.3 Dinamika Phugoid Gerak osilasi terlihat dalam simulasi ini mempunyai periode jauh lebih panjang dibanding short period. Osilasi tersebut dikenal sebagai gerak dinamika phugoid. Gerak phugoid berhubungan dengan perubahan dalam kecepatan pesawat seiring dengan perubahan anggukannya.

21
6.4.4 Dinamika Perubahan Throttle
Manuver menanjak dibuat dalam suatu pesawat terbang tidak dengan menggunakan elevator untuk menggerakan pesawat ke atas tetapi dengan menaikan gaya dorong untuk menaikan gaya angkat. Gaya angkat yang meningkat membuat sudut serong a menurun, yang mana mengartikan pesawat mulai menanjak

22
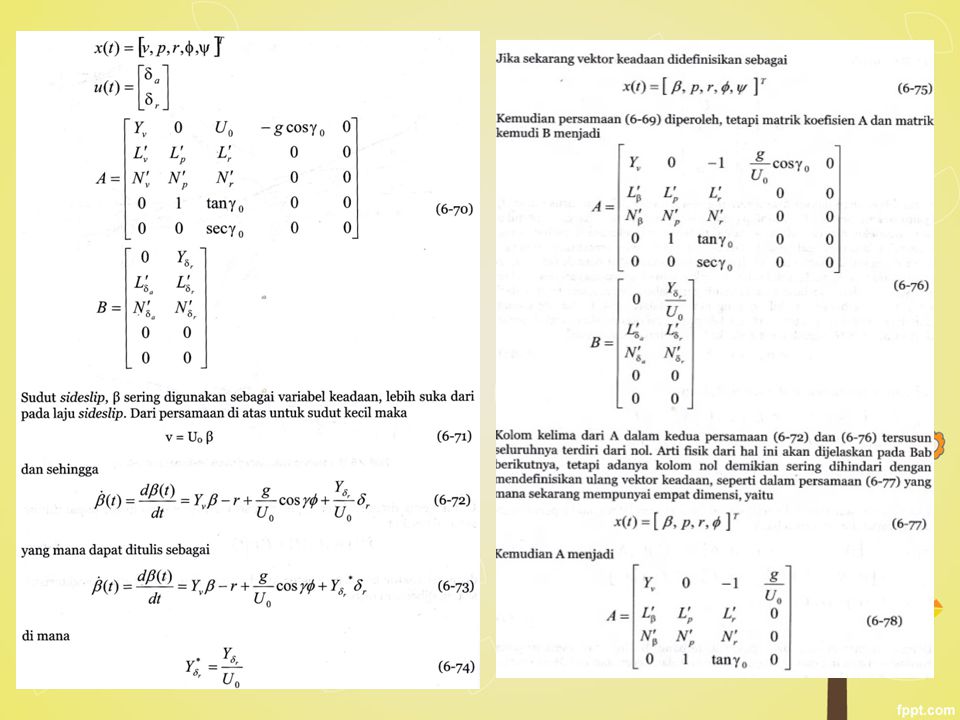
6.5 simulasi sistem dinamis lateral pesawat terbang boeing 747
Gambar 6-15 dibawah ini memperlihatkan gerak lateral suatu pesawat terbang, yaitu merupakan gerak ke arah sisi (menyamping) dan belok.
 dan belok.")
24
Click

Presentasi serupa









>")





>")




