Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
ANALISIS TANGGAP TRANSIEN

2
ANALISIS TANGGAP TRANSIEN
Langkah pertama dalam menganalisis sistem kendali adalah menurunkan model matematik sistem. Setelah model diperoleh, kita dapat menggunakan berbagai metode untuk analisis keandalan sistem (system performance). Respon waktu sistem kendali terdiri dari dua bagian: Tanggap Keadaan Tunak (Seady State response) adalah perilaku keluaran sistem jika waktu mendekati tak-terhingga. Tanggap Transien (Transient Response) adalah tanggap sistem yang berlangsung dari keadaan awal sampai keadaan akhir. Dalam merancang sistem kendali, kita harus mampu meramal perilaku dinamik sistem dengan mengetahui komponen-komponen sistem. Karakteristik perilaku dinamik sistem kendali yang paling penting adalah kestabilan mutlak, yang mencirikan bahwa sistem stabil atau tidak stabil.
. Respon waktu sistem kendali terdiri dari dua bagian: Tanggap Keadaan Tunak (Seady State response) adalah perilaku keluaran sistem jika waktu mendekati tak-terhingga. Tanggap Transien (Transient Response) adalah tanggap sistem yang berlangsung dari keadaan awal sampai keadaan akhir. Dalam merancang sistem kendali, kita harus mampu meramal perilaku dinamik sistem dengan mengetahui komponen-komponen sistem. Karakteristik perilaku dinamik sistem kendali yang paling penting adalah kestabilan mutlak, yang mencirikan bahwa sistem stabil atau tidak stabil.")
3
Soal Tanggap total y(t) dari persamaan diferensial:
dengan kondisi awal y(0)=0 dan Tentukan tanggap keadaan tunak dan tanggap transiennya. Jawab: ya(t) = c1e-t + c2e-2t Dengan memasukkan kondisi awal, maka: ya(0) = y(0) = 0 = c1 + c2 Maka diperoleh : c1=1 dan c2=-1
=0 dan. Tentukan tanggap keadaan tunak dan tanggap transiennya. Jawab: ya(t) = c1e-t + c2e-2t. Dengan memasukkan kondisi awal, maka: ya(0) = y(0) = 0 = c1 + c2. Maka diperoleh : c1=1 dan c2=-1.")
4
y(t) = ya(t) + yb(t) = (e-t - e-2t)+½(1 – 2 e-t + e-2t) = ½ – ½e-2t)
Sehingga diperoleh persamaan: ya(t) = e-t - e-2t Tanggap dipaksa (forced response - integral konvoluasi): Tanggap total : y(t) = ya(t) + yb(t) = (e-t - e-2t)+½(1 – 2 e-t + e-2t) = ½ – ½e-2t) Tanggap Keadaan Tunak : Tanggap Transien :
 = e-t - e-2t. Tanggap dipaksa (forced response - integral konvoluasi): Tanggap total : y(t) = ya(t) + yb(t) = (e-t - e-2t)+½(1 – 2 e-t + e-2t) = ½ – ½e-2t) Tanggap Keadaan Tunak : Tanggap Transien :")
5
FUNGSI TANGGAP IMPULSA
Fungsi alih: G(s) = Y(s)/X(s) dimana : X(s) adalah transformasi Laplace masukkan dan Y(s) adalah transformasi Laplace keluaran. Dapat ditulis: Y(s) = G(s)X(s) yaitu perkalian dalam domain kompleks ekivalen dengan konvolusi dalam domain waktu. Transformasi Laplace balik adalah integral konvolusi berikut: dimana g(t) = x(t) = 0 untuk t < 0 Fungsi tanggap impulsa merupakan tanggap sistem linier tarhadap satuan impulsa apabila keadaan awalnya nol. Y(s) = G(s) y(t) = g(t) = fungsi tanggap impulsa
 = Y(s)/X(s) dimana : X(s) adalah transformasi Laplace masukkan dan Y(s) adalah transformasi Laplace keluaran. Dapat ditulis: Y(s) = G(s)X(s) yaitu perkalian dalam domain kompleks ekivalen dengan konvolusi dalam domain waktu. Transformasi Laplace balik adalah integral konvolusi berikut: dimana g(t) = x(t) = 0 untuk t < 0. Fungsi tanggap impulsa merupakan tanggap sistem linier tarhadap satuan impulsa apabila keadaan awalnya nol. Y(s) = G(s) y(t) = g(t) = fungsi tanggap impulsa.")
6
SISTEM ORDE PERTAMA Tinjau sistem orde pertama yang secara fisis dapat berupa rangkaian RC atau sistem termal. Analisis respon sistem terhadap masukan-masukan berupa satuan tangga, satuan ramp dan satuan impulsa. Blok diagram sistem orde pertama Blok diagram sistem yang disederhanakan

7
Tanggap Tangga Transformasi Laplace dari fungsi masukan tangga adalah 1/s, persamaan kita peroleh menjadi: Dengan menguraikan C(s) menjadi pecahan parsial, kita peroleh: Dengan melakukan transformasi Laplace bali, kita peroleh: Keluaran c(t) mula-mula nol kemudian akhirnya menjadi satu. Pada t=T, harga c(t) adalah 0,632 (63,2% perubahan total). c(T) = 1 – e-1 = 0,632 Pada t=2T, harga c(t)=86,5%
 menjadi pecahan parsial, kita peroleh: Dengan melakukan transformasi Laplace bali, kita peroleh: Keluaran c(t) mula-mula nol kemudian akhirnya menjadi satu. Pada t=T, harga c(t) adalah 0,632 (63,2% perubahan total). c(T) = 1 – e-1 = 0,632. Pada t=2T, harga c(t)=86,5%")
8
Kemiringan garis singgung pada t = 0, adalah :
Keluaran akan mencapai harga akhir pada t=T. Estimasi waktu tunak adalah t 4T (2% dibawah harga akhir).
.")
9
Kesimpulan Tanggap Tangga
1.2 Kinerja 1 0.8 0.6 c 0.4 0.2 2 4 6 8 Waktu (detik) Transien pendek. Tidak ada osilasi. Overshoot kecil. Tidak ada kesalahan keadaan tunak (steady-state error)
 Transien pendek. Tidak ada osilasi. Overshoot kecil. Tidak ada kesalahan keadaan tunak (steady-state error)")
10
Tanggap Ramp Transformasi Laplace dari fungsi masukan ramp adalah 1/s2 , persamaan kita peroleh menjadi: Dengan menguraikan C(s) menjadi pecahan parsial, kita peroleh: Dengan melakukan transformasi Laplace bali, kita peroleh: Sinyal kesalahan e(t) adalah Jika t mendekati tak terhingga, maka e-t/T mendekati nol, sehingga sinyal kesalahan e(t) mendekati T atau : e() = T
 menjadi pecahan parsial, kita peroleh: Dengan melakukan transformasi Laplace bali, kita peroleh: Sinyal kesalahan e(t) adalah. Jika t mendekati tak terhingga, maka e-t/T mendekati nol, sehingga sinyal kesalahan e(t) mendekati T atau : e() = T.")
11
Kesalahan dalam mengikuti masukan ramp mendekati T untuk t yang cukup besar.
Makin kecil konstanta waktu T, makin kecil pula kesalahan tunak.

12
Tanggap Impulsa Untuk masukan impulsa, R(s)=1 , sehingga keluaran sistem: atau :
=1 , sehingga keluaran sistem: atau :")
13
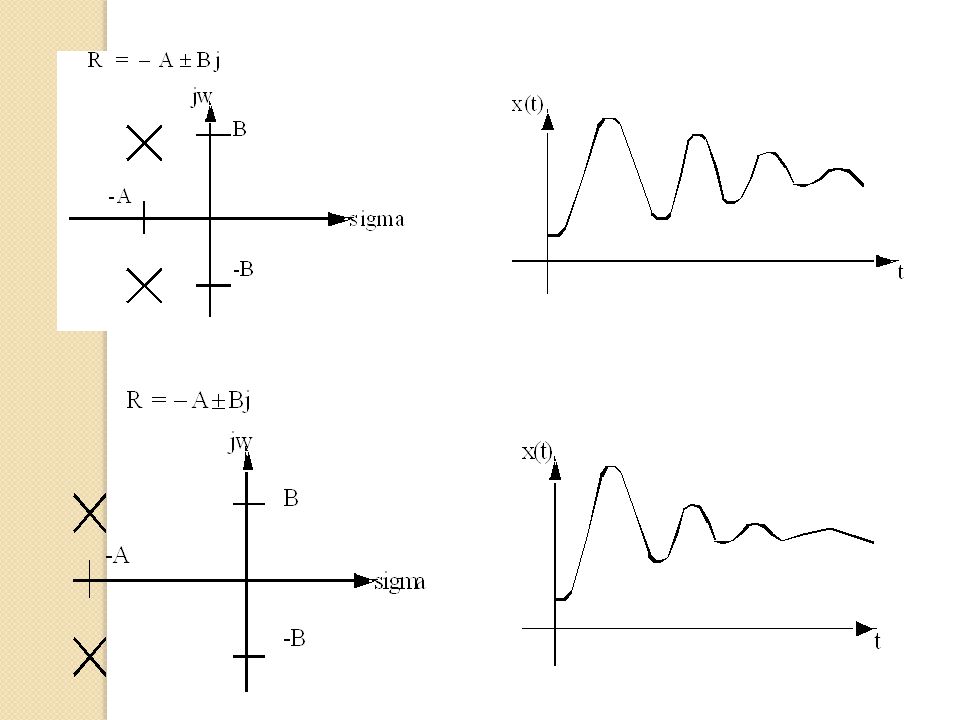
SISTEM ORDE KEDUA Dalam studi sistem kendali, persamaan diferensial orde kedua ditulis: dengan konstanta adalah damping ratio dan konstanta n adalah undamped natural frequency. Jika 0 1, maka persamaan karakteristik adalah : Akar-akarnya adalah : a adalah inverse dari konstanta waktu dari sistem ( = 1/a)
")
14
Contoh Sistem Order Dua
Get oscillatory response if have poles that have non-zero Im values.

15
Parameter Sistem Orde Dua
Get oscillatory response if have poles that have non-zero Im values.

16
Fungsi bobot dari persamaan diferensial orde kedua adalah :
Tanggap unit tangga dinyatakan dengan: dengan :

17
Tanggap Tangga Orde Dua

18
) 2 ( 20 + = s GH ) 2 ( 1 + = s GH Closed-Loop System Step Responses
Time (sec.) Amplitude Closed-Loop System Step Responses 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 ) 2 ( 20 + = s GH ) 2 ( 1 + = s GH
 Amplitude. Closed-Loop System Step Responses ) 2. ( = s. GH. ) 2. ( 1. + = s. GH.")
19
Tanggap Tangga Diketahui sistem: Tanggap tangga: Kutub-kutub: z - w zw
Im Re 2 3 1 z - w zw = + n j s

20
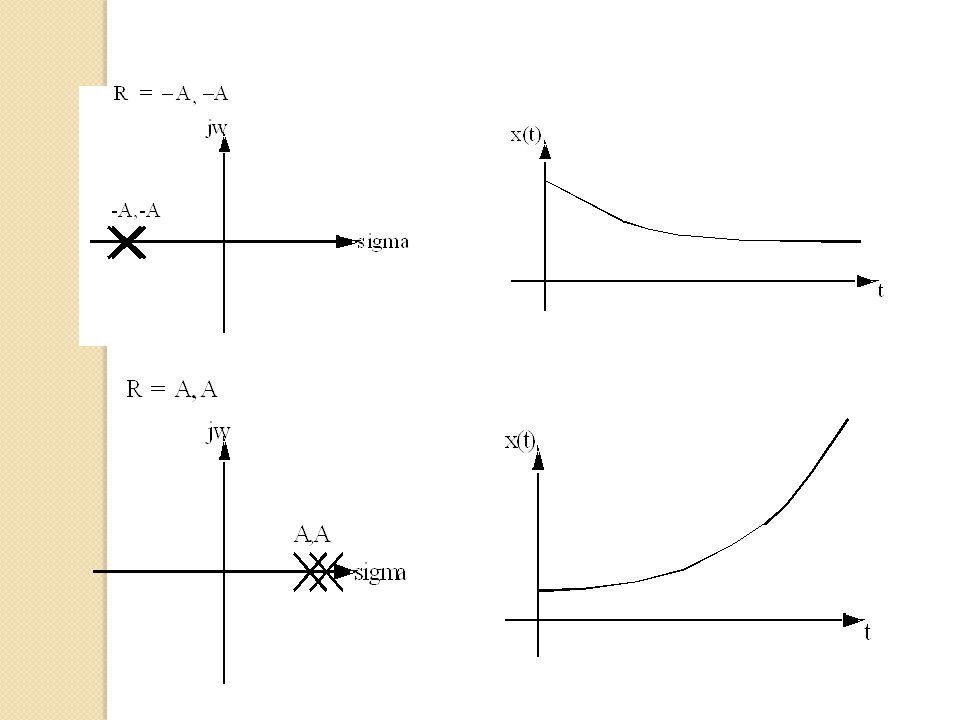
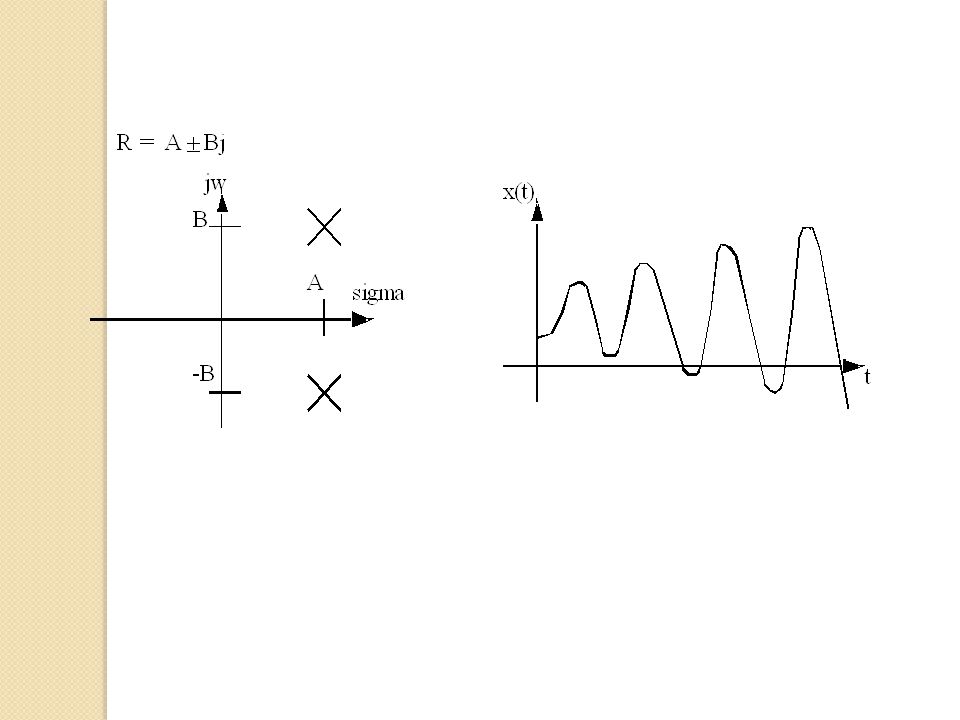
Pengaruh Lokasi Kutub Osilasi (Frek. Tinggi) Meluruh Cepat
Im(s) Meluruh Cepat Menanjak Cepat Re(s) (e-at) (eat)
 Meluruh Cepat. Menanjak Cepat. Re(s) (e-at) (eat)")
21
Contoh:

25
Tanggap Tangga Sistem Orde Dua
Diketahui sistem: Dengan menguraikan C(s) menjadi pecahan parsial, kita peroleh: Maka tanggap waktu :
 menjadi pecahan parsial, kita peroleh: Maka tanggap waktu :")
26
Kutub-kutub Nyata dan Kompleks
Jika diketahui fungsi tanggap kompleks: Maka fungsi tanggap waktunya adalah: Bentuk umum dari fungsi tanggap waktu:

27
Soal Diketahui fungsi alih sistem:
Tentukan fungsi tanggap tangga dan tanggap waktunya. Jawab: Tanggap tangga: Dengan menguraikan C(s) menjadi pecahan parsial, kita peroleh:
 menjadi pecahan parsial, kita peroleh:")
28
Maka: Maka fungsi tanggap waktunya adalah:

29
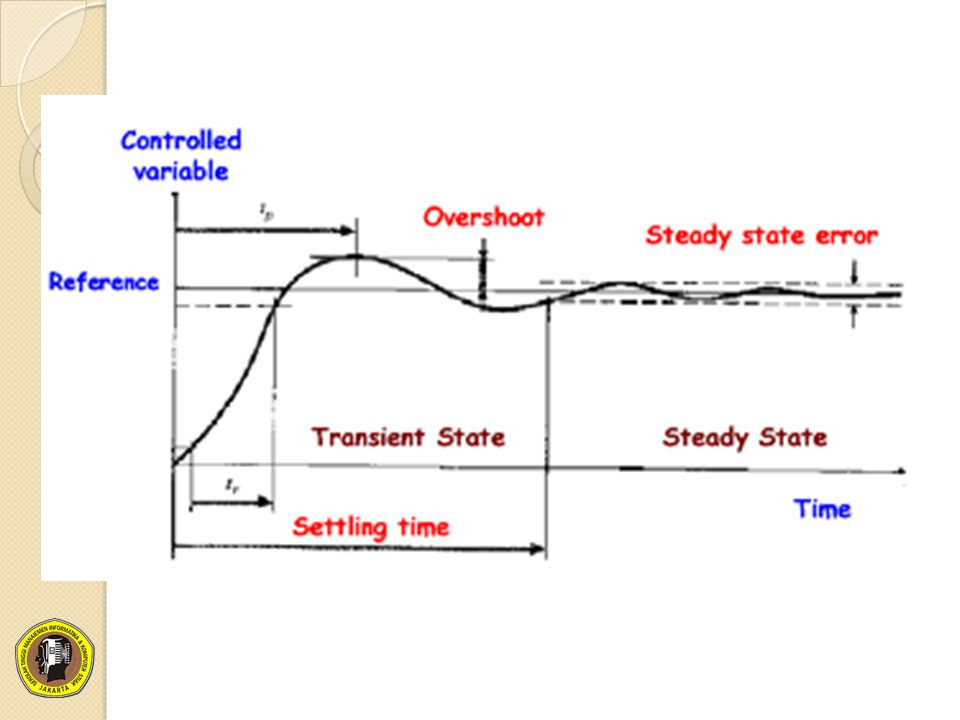
SPESIFIKASI TANGGAP TRANSIEN
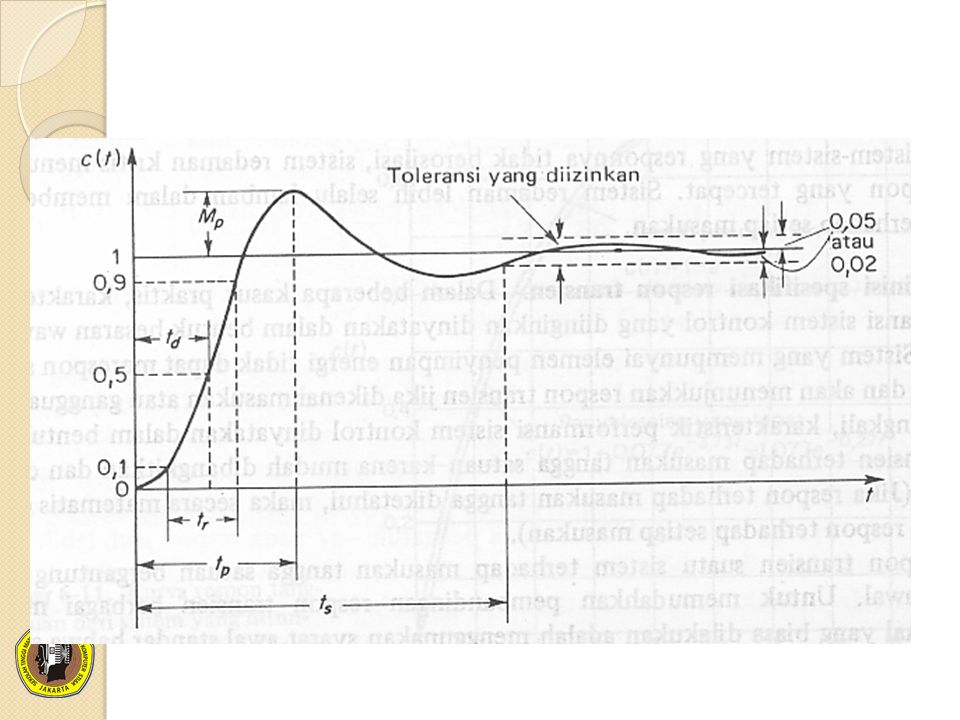
Tanggap transien sistem kendali sering menunjukkan osilasi terendam sebelum mencapai keadaan tunak. Karakteristik tanggap transien sistem kontrol terhadap masukan unit tangga, dinyatakan dalam parameter: Waktu tunda (delay time) td Waktu naik (rise time) tr Waktu puncak (peak time) tp Lewatan maksimum (maksimum overshoot) Mp Waktu penetapan (settling time) ts
 td. Waktu naik (rise time) tr. Waktu puncak (peak time) tp. Lewatan maksimum (maksimum overshoot) Mp. Waktu penetapan (settling time) ts.")
32
Soal Suatu sistem getaran mekanik. Jika gaya maukan tangga 2 N dikenakan pada sistem, maka massa tersebut akan berosilasi seperti ditunjukkan pada gambar dibawah. Tentukan m, f dan k sistem dari kurva tanggap sistem ini.

33
Jawab Fungsi alih sistem adalah: karena: Maka tanggap tangga:
Ini berarti bahwa harga keadaan tunak x adalah: Dengan demikian: k = 20 N/m Perhatikan bahwa Mp = 9,5% untuk =0,6. Waktu puncak tp diberikan oleh :

34
Kurva eksperimental menunjukkan bahwa tp = 2 detik, maka:
Karena: Maka diperoleh: Selanjutnya f ditentukan dari :

35
KRITERIA KESTABILAN ROUTH
Suatu sistem kendali adalah stabil jika dan hanya jika semua kutub loop tertutup terletak disebelah sumbu khayal bidang s. Sebagian besar sistem loop tertutup linier mempunyai fungsi alih: dimana a dan b adalah konstanta dan m n, maka kita harus mengurai polinomial A(s) atas faktor-faktornya untuk mencari kutub-kutub tertutup. Kriteria kestabilan Routh menunjukkan ada atau tidak ada akar-akar positif pada persamaan polinominal, tanpa harus menyelesai-kan persamaan tersebut. Informasi mengenai kestabilan diperoleh secara langsung dari koefisien-koefisien persamaan karakteristik.
 atas faktor-faktornya untuk mencari kutub-kutub tertutup. Kriteria kestabilan Routh menunjukkan ada atau tidak ada akar-akar positif pada persamaan polinominal, tanpa harus menyelesai-kan persamaan tersebut. Informasi mengenai kestabilan diperoleh secara langsung dari koefisien-koefisien persamaan karakteristik.")
36
Prosedur Kriteria Kestabilan Routh
Tulislah polinomial dalam s sesuai dengan bentuk berikut: Kriteria diterapkan menggunakan Tabel Routh yang didefinisikan sebagai berikut: Koefisien-koefisien b1, b2, b3 dan seterusnya dihitung dengan:

37
Syarat perlu dan cukup bahwa semua akar-akar persamaan berada disebelah kiri sumbu khayal bidang s adalah bahwa semua koefisien persamaan harus positif dan semua suku pada kolom pertama dari susunan tersebut harus bertanda positif.

38
Soal Tinjau polinomial berikut: s3 + 6s2 + 12s + 8 = 0 Tentukan kestabilan sistem berdasarkan kriteria kestabilan Routh. Jawab: Karena tidak ada perubahan tanda koefisien pada kolom pertama dari tabel, berarti seluruh akar-akar persamaan adalah bagian nyata negatif (sistem stabil).
.")
Presentasi serupa










>")





 Tim Penyusun: Ridha Iskandar,Ssi.,S.Kom.,MM Irwan Arifin, Ssi.,MM Muhammad.>")


