Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
“Sistem Kontrol Robust” KELOMPOK 1

2
Nama Kelompok : 1.Tian Soge’ M6. Nahdiyatul Ursi’ah 2.Samuel Saut7. Ambar Jati W. 3.Davin8. Andri Setya D. 4.Mahdi Ansory9. Chairul Arifin 5.H. Lismanto10. Nandhini D.N

3
Introduction Teory “Robust” Sistem Pengendali Linear telah berkembang sangat pesat selama 10 tahun terakhir. Pada awalnya teori kontrol robust (1980-1990an) di ciptakan karena keinginan untuk memperbaiki metode state-space (1960an-1970an) yang masih memliki kekurangan terhadap ketahanan dari gangguan.
 di ciptakan karena keinginan untuk memperbaiki metode state-space (1960an-1970an) yang masih memliki kekurangan terhadap ketahanan dari gangguan..")
4
Kontrol Robust adalah sebuah cabang dari teori kontrol, yang merupakan suatu kontroler yang tidak peka terhadap perubahan parameter, kesalahan model dan gangguan. Metode robust bertujuan untuk mencapai kinerja yang kokoh dan / atau stabilitas jika terjadi kesalahan pemodelan dan gangguan- gangguan.

5
Contoh yang paling penting dari teknik kontrol robust adalah H-infinity loop-shaping, yang dikembangkan oleh Duncan McFarlane dan Keith Glover dari Cambridge University.

6
Robust Theory Teori kontrol robust yang secara eksplisit berkaitan dengan ketidakpastian dalam pendekatan desain controller.

7
Arti kata dari “Robust” adalah kokoh atau jika dikaitkan dengan sistem maka sistem dikatakan robust jika pada saat sifat tersebut berada pada satu titik, maka sifat tersebut akan mempunyai kemampuan bertahan terhadap keadaan sekitarnya sehingga mempunyai daya tahan.

8
Tujuan pendesainan kontroler Menghilangkan steady state error Memperbaiki dinamika dari plant Menghilangkan efek dari disturbance Mengambil perhatian terhadap perubahan yang disebabkan oleh perubahan parameter model dan perubahan set point, biasa disebut robustness

9
Suatu sistem dinyatakan robust bila: 1.Memiliki sensitivitas rendah 2.Bersifat stabil terhadap range variasi parameter tertentu. 3.Performansi terus memenuhi spesifikasi bila ada serangkaian perubahan dalam parameter sistem.

10
Permasalahan utama dalam sistem robust: 1. Permasalahan sisntesis Pengontrol yang telah diperoleh dilakuakan pemeriksaan terhadap sinyal-sinyal terkontrolnya (tracking error sinyal pengontrolnya). ex: Kontrol Optimal H 2 dan H ∞ 2. Permasalahan analisis Mendesain sebuah pengontrol sistem dinamik sehinggasinyal- sinyal terkontrolnya memenuhi sifat- sifat yang diinginkan.
. ex: Kontrol Optimal H 2 dan H ∞ 2. Permasalahan analisis Mendesain sebuah pengontrol sistem dinamik sehinggasinyal- sinyal terkontrolnya memenuhi sifat- sifat yang diinginkan..")
11
Diagram Blok Sistem Kontrol Secara Umum

12
Diagram Blok Robust Kontrol

13
Kestabilan Sistem

14
Dari suatu sistem yang stabil tersebut akan didapatkan suatu spesifikasi dan parameter sistem, diataranya adalah tracking error kondisi tunak (steady state tracking error), persen overshoot, settling time, peak time serta rise time. Akan tetapi sistem loop tertutup (mempunyai feedback) juga belum tentu stabil. Salah satu metode untuk mengetahui kestabilan sistem maka digunakan suatu metode respon frekuensi
 juga belum tentu stabil. Salah satu metode untuk mengetahui kestabilan sistem maka digunakan suatu metode respon frekuensi.")
15
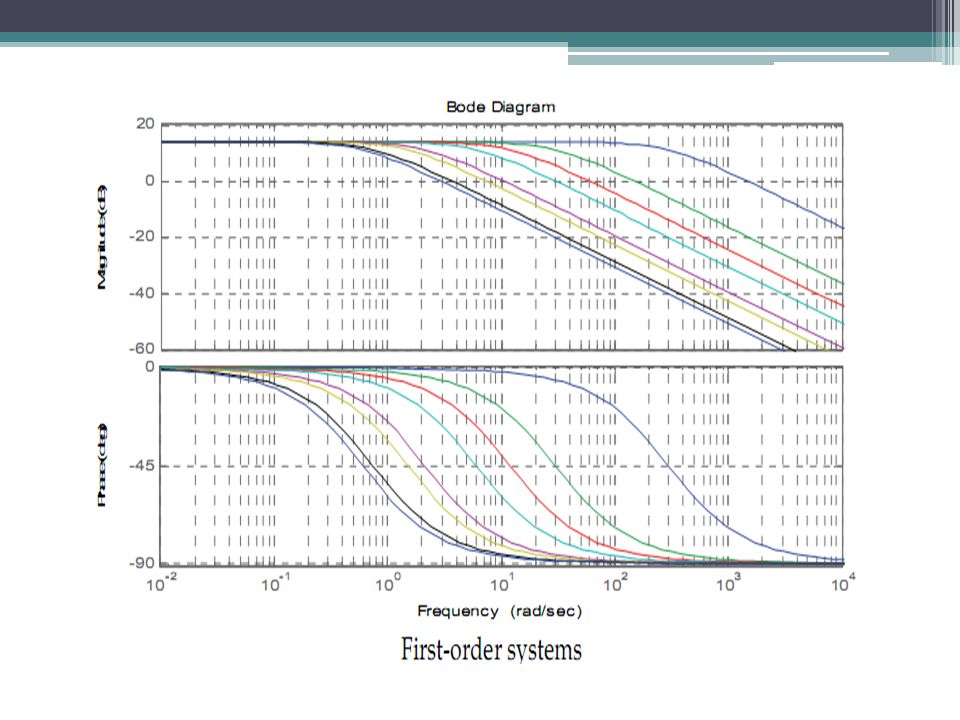
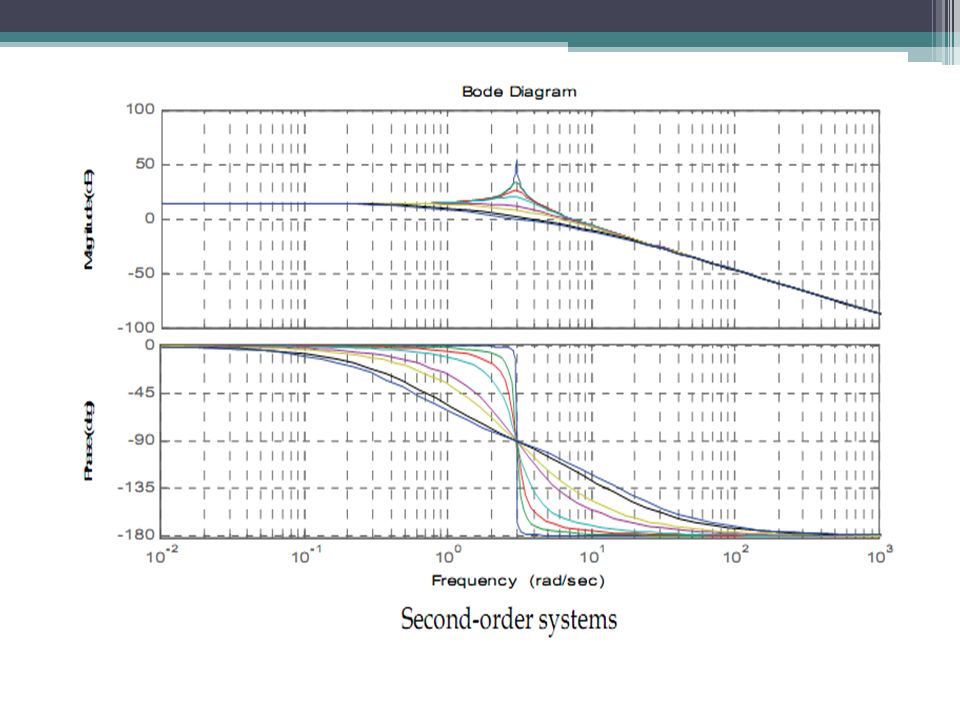
Dengan menggunakan diagram bode. Diagram bode terdiri dari dua grafik, yaitu nilai logaritma magnitude terhadap variasi frekuensi dalam skala logaritmik dan diagram sudut fase.

16
Gambar logaritma magnitude dari gain K adalah berupa garis lurus dengan slope tertentu. Jika merupakan zero/nol

17
Jika berupa suatu pole atau kutub

18
Indeks Performansi Indeks performansi merupakan perhitungan secara kuantitatif dari sebuah kinerja sistem dan dipilih dengan memberikan penekanan pada spesifikasi dari suatu sistem.

19
Indeks performansi ITAE (Integral of the Time multiplied by the Absolute value of the Error) ITAE= IeI(t)dt Kelebihannya : dapat mengurangi maksimum overshoot dari respon step sistem Sebuah sistem kontrol yang optimal akan dapat meminimalkan indeks performansi
 ITAE= IeI(t)dt Kelebihannya : dapat mengurangi maksimum overshoot dari respon step sistem Sebuah sistem kontrol yang optimal akan dapat meminimalkan indeks performansi")
20
Tabel koefisien indeks performansi ITAE untuk input step Tabel koefisien indeks performansi mempunyai harga yang berbeda untuk setiap sistem dengan orde yang berbeda pula.

21
Robust Control Tools Kestabilan robust dan Kriteria Kestabilan Nyquist Diagram Bode Evans Root Locus

22
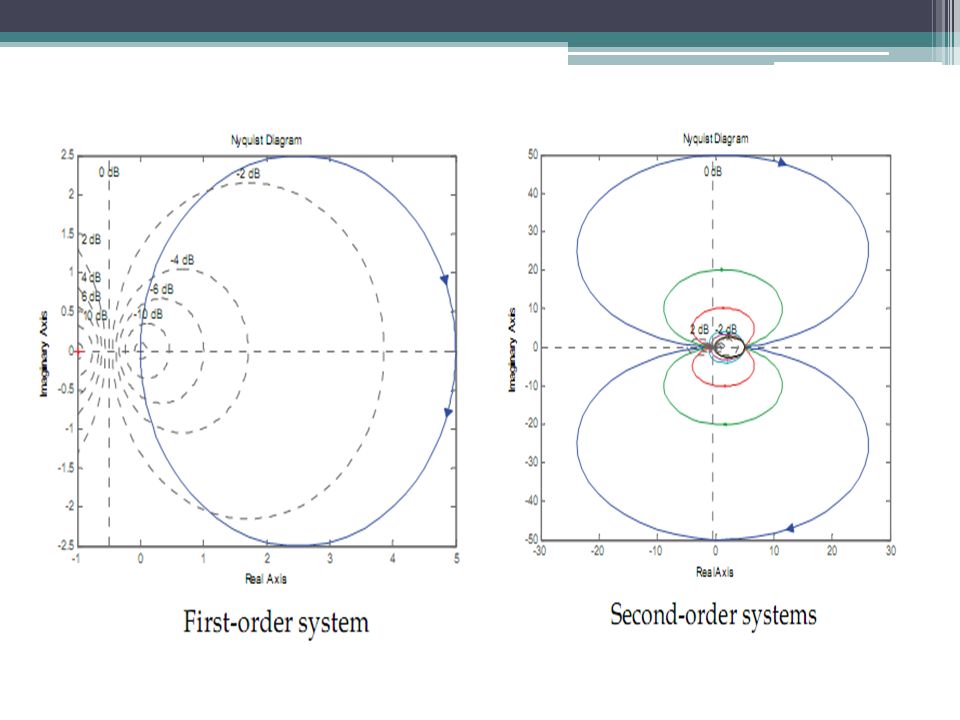
Kestabilan robust dan Kriteria Kestabilan Nyquist Untuk memunculkan kestabilan robust, sistem yang ada harus memiliki feedback (Sistem Closed Loop). Sebelum membahas tentang kestabilan robust, tentu kita perlu membahas salah satu tools yang juga bisa mendeteksi kestabilan sistem closed loop, yaitu Kriteria Kestabilan Nyquist

23
Kriteria Kestabilan Nyquist Untuk mengetahui kestabilan menggunakan kestabilan Nyquist, kita harus mengetahui terlebih dahulu persamaan sistem open loop- nya.

24
Dari Diagram blok di atas, maka sistem close loop-nya dapat dibuat Fungsi Alihnya : F.A (Fungsi Alih) Close Loop = Maka, untuk mencari pole dari dari sistem tersebut dengan mencari akar-akar penyebut dari FA diatas 1 + G(s)H(s)= P(s)=0 Agar Stabil Pole harus berada di sumbu kiri Imajiner
 Close Loop = Maka, untuk mencari pole dari dari sistem tersebut dengan mencari akar-akar penyebut dari FA diatas 1 + G(s)H(s)= P(s)=0 Agar Stabil Pole harus berada di sumbu kiri Imajiner")
25
Untuk membentuk kontur Nyquist (dengan tujuan mendeteksi apakah ada pole di sumbu kanan Imajiner) dengan cara mempetakan persamaan P(S) ke Kontur Nyquist
 dengan cara mempetakan persamaan P(S) ke Kontur Nyquist")
26
Kontur Nyquist yang dipetakan ke bidang P(s) Subtitusikan s = j ke P(S) dengan merubah-rubah dari - s/d Subtitusikan s = re j ke P(S) dengan merubah-rubah dari + ∏ /2 sampai - ∏ /2 dan r=
 Subtitusikan s = j ke P(S) dengan merubah-rubah dari - s/d Subtitusikan s = re j ke P(S) dengan merubah-rubah dari + ∏ /2 sampai - ∏ /2 dan r= ")
27
Analisis Kestabilan Nyquist : Analisis kestabilan : Z R = N + P R Z R = Banyaknya zero dari P(S) 1 + G(S)H(S) yang terletak di sebelah kanan sb-khayal bidang s ( banyaknya akar) N = Banyaknya pengelilingan -1 +j 0 P R = banyaknya pole dari G(S)H(S) di sebelah kanan sb-khayal Z R = 0 Sistem kontrol stabil
 1 + G(S)H(S) yang terletak di sebelah kanan sb-khayal bidang s ( banyaknya akar) N = Banyaknya pengelilingan -1 +j 0 P R = banyaknya pole dari G(S)H(S) di sebelah kanan sb-khayal Z R = 0 Sistem kontrol stabil")
29
Diagram Bode Bode Plot Merupakan tool sederhana untuk penggambaran respon frekuensi sistem. Type plot 20 log |G| yang diberikan dengan besaran dB

30
Untuk membentuk gabungan skets, Susun representasi dari fungsi transfer penguatan DC tiap elemen sebagai satuan (kecuali untuk bagian yang memiliki pole atau zero pada pusat). Gabungkan penguat ke dalam seluruh penguat plant. Gambarkan skets semua komponen. Mulai dari frekuensi rendah (DC) dengan komponen yang memiliki frekuensi terendah pole atau zero (s=0). Gunakan komponen ini untuk menggambarkan sketsa diatas frekuensi berikut pole/zero. Ubah slope dari sketsa pada titik ini untuk menghitung dinamika baru : -1 untuk pole, +1 untuk zero,-2 untuk dobel pole,...
 dengan komponen yang memiliki frekuensi terendah pole atau zero (s=0). Gunakan komponen ini untuk menggambarkan sketsa diatas frekuensi berikut pole/zero. Ubah slope dari sketsa pada titik ini untuk menghitung dinamika baru : -1 untuk pole, +1 untuk zero,-2 untuk dobel pole,....")
33
Evans Root Locus Selain menentukan stabilitas sistem,root locus dapat digunakan untuk merancang rasio redaman dan frekuensi alami dari sistem umpan balik (Franklin et al., 2002). Garis rasio redaman yang konstan dapat ditarik secara radial dari nilai awal dan garis konstan frekuensi alami dapat ditarik sebagai busur yang pusat poinnya bertepatan dengan nilai awal.

34
Dapat dilihat pada contoh berikut: Gambar root locus orde 2

35
Dengan memilih titik sepanjang root locus yang bertepatan dengan rasio redaman yang diinginkan dan frekuensi alami gain k, dapat dihitung dan diimplementasikan dalam controller. Definisi dari rasio redaman dan frekuensi alami mengasumsikan bahwa keseluruhan sistem umpan balik mendekati sistem orde dua, yaitu sistem yang memiliki sepasang pole yang dominan. Hal ini jarang terjadi sehingga itu merupakan cara yang baik untuk mensimulasikan desain akhir.untuk memeriksa apakah tujuan proyek tercapai.

36
Misalkan terdapat plant (proses) dengan ekspresi fungsi transfer P (s), dan kontoler maju dengan nilai K yang bisa disesuaikan dan fungsi transfer ekspresi C (s). Sebuah kesatuan umpan balik dibangun untuk melengkapi sistem umpan balik.

37
Untuk sistem tersebut, fungsi transfer secara keseluruhan adalah: Jadi pole loop tertutup dari fungsi transfer adalah solusi untuk persamaan yaitu 1 + K.C (s). P (s) = 0. Fitur utama dari persamaan ini adalah bahwa akar dapat ditemukan dimanapun K.C.P = -1.
 = 0. Fitur utama dari persamaan ini adalah bahwa akar dapat ditemukan dimanapun K.C.P = -1..")
38
Dari function T (s), kita juga dapat melihat bahwa angka nol dari sistem loop terbuka (CP) juga angka nol dari sistem loop tertutup. Penting untuk dicatat bahwa root locus hanya memberikan lokasi kutub loop tertutup sebagai gain K yang bervariasi, mengingat fungsi transfer loop terbuka. Nilai nol dari sistem tidak dapat dipindahkan.

39
Dengan menggunakan beberapa aturan dasar, metode root locus dapat mengplot bentuk keseluruhan dari jalannya sistem (locus) yang dilalui oleh akar dengan nilai K bervariasi. Plot dari root locus kemudian memunculkan stabilitas dan dinamika umpan balik sistem untuk nilai k yang berbeda beda.

40
Modelling Modelling ???? Kesulitan dalam Modelling?? Sulit dalam Modelling, dikarenakan oleh faktor: Imperfect plant data Time varying plants Higher order dynamics Non-linearity Complexity Skills

41
Modelling uncertainty Modelling uncertaint ?? Faktor yang menyebabkan modeling menjadi tidak pasti ketidakpastian dan gangguan eksternal ketidakpastian dimensi terbatas dan model linear Ketidakpastiannya berupa: Ketidakpastian dinamis Ketidakpastian parametik atau terstruktur.

42
Metode Metode Robust H2 optmal control / nominal performance Hinf optimal control / robust stability Lyapunov Transfer function Close loop stability Mix H2 and Hinf / Robust performance stability PID Robust Fuzzy Robust Adaptive Control

43
Jurnal PERANCANGAN DAN SIMULASI SISTEM KONTROL POSISI PADA PANEL SURYA DENGAN MENGGUNAKAN METODE ROBUST-PID

44
Kontrol PID

45
Kontrol Robust PID Problem utama dalam memilih koefisien PID (Kp, Ki, Kd) adalah ketiga koefisien ini tidak dapat menggambarkan performansi yang diinginkan. Salah satu dalam memecahkan masalah adalah dengan menggunakan indeks performansi dari sistem.

46
Perancangan Sistem Model Panel Surya

47
Model Plant Motor Servo

48
dimana : ea (t) = Besarnya tegangan yang diberikan; pada motor (volt); eb (t) = emf balik (volt); ia (t) = Arus jangkar (Ampere); Ra (t) = Tahanan kumparan jangkar (Ohm); La (t) =Induktansi kumparan jangkar (Henry); Kb = Konstanta emf balik (Volt-sec/rad); Km = Konstanta torsi (N-m/Ampere); J = Momen inersia rotor (Kg-m2); B = Koefisien gesekan viskos (Nm/rad/sec); Tm(t) = Torsi motor (N-m); ωm(t) = Kecepatan sudut motor (rad/sec).
 = Besarnya tegangan yang diberikan; pada motor (volt); eb (t) = emf balik (volt); ia (t) = Arus jangkar (Ampere); Ra (t) = Tahanan kumparan jangkar (Ohm); La (t) =Induktansi kumparan jangkar (Henry); Kb = Konstanta emf balik (Volt-sec/rad); Km = Konstanta torsi (N-m/Ampere); J = Momen inersia rotor (Kg-m2); B = Koefisien gesekan viskos (Nm/rad/sec); Tm(t) = Torsi motor (N-m); ωm(t) = Kecepatan sudut motor (rad/sec).")
49
Keluaran amplifier servo dapat dinyatakan sebagai berikut : e (t) = -K[e (t) e (t)] = -Ke (t) ea = Tegangan keluaran servo amplifier (Volt); K = Besarnya nilai penguatan;
![Keluaran amplifier servo dapat dinyatakan sebagai berikut : e (t) = -K[e (t) e (t)] = -Ke (t) ea = Tegangan keluaran servo amplifier (Volt); K = Besarnya nilai penguatan;](http://images.slideplayer.info/36/10639878/slides/slide_49.jpg "Keluaran amplifier servo dapat dinyatakan sebagai berikut : e (t) = -K[e (t) e (t)] = -Ke (t) ea = Tegangan keluaran servo amplifier (Volt); K = Besarnya nilai penguatan;")
50
posisi sudut roda gigi keluaran dihubungkan ke posisi motor melalui perbandingan roda gigi 1/n, sehingga : dimana : θ0 = posisi sudut keluaran roda gigi; θm = posisi sudut motor.

51
Dari Plant Model Servo, diperoleh : La Setelah ditransforamasi Lapplace : (La s + Ra) Ia(s) + Eb(s) = Ea(s) Dengan : J Persamaan torsi diperoleh: J (t)
 Ia(s) + Eb(s) = Ea(s) Dengan : J Persamaan torsi diperoleh: J (t)")
52
Setelah ditransformasi Lapplace :

53
Fungsi Alih Sistem : Fungsi Alih Sistem Setelah ditambahkan kontroller PID :

57
Kesimpulan: Dari analisis dan pembahasan yang telah dilakukan, kontroller dengan menggunakan optimal robust control memberikan performance yang lebih baik dibandingkan tanpa kontroller dan kontroller PID.

Presentasi serupa









>")




 Tim Penyusun: Ridha Iskandar,Ssi.,S.Kom.,MM Irwan Arifin, Ssi.,MM Muhammad.>")

, Time-to-peak (Tp),>")





