Upload presentasi
Presentasi sedang didownload. Silahkan tunggu

1
Tugas Pengendalian Mutu
Nama : Kristianto Npm : (A) Resume Jurnal
 Resume Jurnal.")
2
Sebuah Desain Statistik Ekonomi-x Pengendalian Charts dengan Multiple Penyebab Ditetapkan
Abstrak Duncan pertama kali mengajukan rancangan ekonomis peta kendali x pada tahun 1956 untuk mengendalikan normal proses berarti dan memastikan bahwa design chart kendali ekonomi sebenarnya menurunkan biaya, dibandingkan dengan peta kendali Shewhart. Banyak penulis telah mempelajari peta kendali dari ekonomi sudut pandang mulai saat itu. Sebuah desain yang tidak mempertimbangkan sifat statistik, seperti tipe I atau tipe kesalahan II dan waktu rata-rata untuk sinyal (ATS). Untuk memperbaiki masalah ini, sebuah economicstatistical desain peta kendali telah dikembangkan di bawah salah satu pertimbangan dialihkan penyebab. Namun, ada beberapa penyebab dialihkan dalam praktik riil seperti masalah mesin, bahan deviasi, kesalahan manusia, dll Dalam rangka untuk memiliki aplikasi nyata, penelitian ini akan memperpanjang riset asli dari single ke menyebabkan beberapa dialihkan untuk membentuk model ekonomi- statistik peta kendali x. Sebuah contoh numerik yang digunakan untuk menggambarkan kinerja yang diusulkan model dan untuk membandingkan biaya yang hilang antara peta kendali murni ekonomi dan ekonomi-statistik desain. Analisis sensitivitas juga dilakukan dalam contoh numerik.
. Untuk memperbaiki masalah ini, sebuah economicstatistical desain peta kendali telah dikembangkan di bawah salah satu pertimbangan dialihkan penyebab. Namun, ada beberapa penyebab dialihkan dalam praktik riil seperti masalah mesin, bahan deviasi, kesalahan manusia, dll Dalam rangka untuk memiliki aplikasi nyata, penelitian ini akan memperpanjang riset asli dari single ke menyebabkan beberapa dialihkan untuk membentuk model ekonomi- statistik peta kendali x. Sebuah contoh numerik yang digunakan untuk menggambarkan kinerja yang diusulkan model dan untuk membandingkan biaya yang hilang antara peta kendali murni ekonomi dan ekonomi-statistik desain. Analisis sensitivitas juga dilakukan dalam contoh numerik.")
3
PENDAHULUAN Peta kendali adalah salah satu teknik yang paling penting dalam pengendalian proses statistik. The contoh alat pengukuran karakteristik kualitas dalam sampel yang diambil dari produksi proses adalah plot pada tabel ini. Hal ini dapat diterapkan untuk mengurangi variabilitas proses dan juga digunakan untuk menjaga proses dalam keadaan kendali statistik. Ini adalah teknik proses monitoring yang sangat berguna. A ukuran sampel n, sampling interval antara h sampel, dan koefisien k kontrol batas (sebagai beberapa standar deviasi) harus dipilih oleh insinyur atau analis untuk penggunaan peta kendali. Secara tradisional, diagram kontrol dirancang dengan memperhatikan kriteria statistik saja. Its mungkin kinerja tidak memuaskan dari sudut pandang ekonomi. Duncan (1956) pertama kali diusulkan model ekonomi x peta kendali untuk mengontrol berarti proses normal dan menjamin bahwa peta kendali ekonomi desain sebenarnya memiliki biaya yang lebih rendah, dibandingkan dengan peta kendali Shewhart. Dalam model Duncan (1956), itu mengasumsikan bahwa hanya ada satu penyebab yang dapat ditetapkan dalam proses produksi dan mekanisme kegagalan dari di-kontrol untuk keluar-negara-kontrol distribusi eksponensial. Empat item biaya yang dipertimbangkan dalam model ini termasuk biaya pengambilan sampel dan pengujian, biaya yang meningkat dari luar- proses-kontrol, false alarm biaya dan biaya untuk mencari dan menghilangkan masalah. Penelitian ini stimulus untuk banyak dari studi selanjutnya pada subjek.
 harus dipilih oleh insinyur atau analis untuk penggunaan peta kendali. Secara tradisional, diagram kontrol dirancang dengan memperhatikan kriteria statistik saja. Its mungkin kinerja tidak memuaskan dari sudut pandang ekonomi. Duncan (1956) pertama kali diusulkan model ekonomi x peta kendali untuk mengontrol berarti proses normal dan menjamin bahwa peta kendali ekonomi desain sebenarnya memiliki biaya yang lebih rendah, dibandingkan dengan peta kendali Shewhart. Dalam model Duncan (1956), itu mengasumsikan bahwa hanya ada satu penyebab yang dapat ditetapkan dalam proses produksi dan mekanisme kegagalan dari di-kontrol untuk keluar-negara-kontrol distribusi eksponensial. Empat item biaya yang dipertimbangkan dalam model ini termasuk biaya pengambilan sampel dan pengujian, biaya yang meningkat dari luar- proses-kontrol, false alarm biaya dan biaya untuk mencari dan menghilangkan masalah. Penelitian ini stimulus untuk banyak dari studi selanjutnya pada subjek.")
4
METODE DESAIN STATISTIK EKONOMI BAGAN KONTROL
Statistik desain peta kendali bertujuan kinerja grafik yang optimal dalam hal statistik properti. Desain ekonomi peta kendali berdasarkan kriteria ekonomi. Sebuah ekonomi desain statistik dari bagan kendali dapat didefinisikan sebagai bahwa fungsi biaya ekonomi-rugi yang diminimalkan tunduk pada nilai maksimum terkendala probabilitas tipe I dan kesalahan tipe II, sebagai serta nilai maksimum rata-rata Waktu untuk Signal (ATS) ketika menggeser proses. Atas dasar kendala statistik tertentu, diagram kontrol kemudian dirancang untuk memiliki nilai ATS0 lama ketika proses ini di kontrol dan nilai- nilai ATS1 kecil ketika proses di luar kendali (Saniga, 1989; Yang, 1998). Misalkan Y adalah himpunan parameter desain dan L menjadi kerugian yang diperkirakan fungsi biaya per jam dari kontrol x model chart ekonomi. Kemudian, model statistik ekonomi peta kendali x dapat dirumuskan sebagai:
 ketika menggeser proses. Atas dasar kendala statistik tertentu, diagram kontrol kemudian dirancang untuk memiliki nilai ATS0 lama ketika proses ini di kontrol dan nilai- nilai ATS1 kecil ketika proses di luar kendali (Saniga, 1989; Yang, 1998). Misalkan Y adalah himpunan parameter desain dan L menjadi kerugian yang diperkirakan fungsi biaya per jam dari kontrol x model chart ekonomi. Kemudian, model statistik ekonomi peta kendali x dapat dirumuskan sebagai:")
5
minimasi L(Y ) Subjek dari α≤α β≤β
 Subjek dari α≤α β≤β")
6
dimana u≤α dan u≤β adalah batas yang diinginkan pada probabilitas kesalahan tipe I dan tipe II probabilitas kesalahan, masing. Solusi dari model ini adalah perbaikan terhadap desain ekonomi karena baik sifat statistik dan minimasi jumlah biaya kerugian telah dipertimbangkan. Sebuah solusi tanpa kendala adalah desain ekonomi optimum grafik kontrol (Yang, 1998; Yu et al, 2006.).
..")
7
DEFINISI DAN ASUMSI Fitur untuk dikaji dalam artikel ini adalah sebagai berikut (Duncan, 1971): 1. Proses ini baik kontrol-in atau out-of-control negara saja dan di-kontrol negara di awal. 2. Penyebab dialihkan mth akan menghasilkan pergeseran dalam proses rata-rata σ m δ dimana σ adalah standar deviasi dari X. 3. Standar deviasi diasumsikan tetap invariant ketika pergeseran proses. 4. Kemungkinan pergeseran positif atau negatif akan sama. 5. Tingkat kegagalan penyebab assignable mth berikut sebuah distribusi eksponensial dengan λ m. 6. Distribusi dari x adalah normal. 7. Produksi kontinu selama pencarian dan perbaikan. 8. Probabilitas deteksi jika tujuan dialihkan terjadi lebih besar dari 1 – u β. 9. Jenis saya error peta kendali kurang dari u α Out-of-control ATS akan kurang dari 4. Pada saat ini, ada waktu siklus yang diharapkan dan kerugian diharapkan dapat dirumuskan dalam model konstruksi.

8
DIHARAPKAN WAKTU SIKLUS PADA PROSES PRODUKSI
Panjang siklus terdiri dari empat interval waktu, yaitu, (1) interval selama yang proses kontrol, (2) interval selama proses out-of-control tapi masih tidak terdeteksi; (3) waktu yang dibutuhkan untuk sampel, memeriksa, mengevaluasi dan plot suatu mean sampel, (4) waktu yang diperlukan untuk pencarian dan perbaikan penyebab dialihkan. Atas dasar (1971) model Duncan, sebuah ekonomi desain bagan kendali x dianggap ketika ada beberapa penyebab dialihkan. Diasumsikan bahwa proses dimulai dalam keadaan kendali statistik dengan mean 0 σ μ dan standar deviasi.
 interval selama yang proses kontrol, (2) interval selama proses out-of-control tapi masih tidak terdeteksi; (3) waktu yang dibutuhkan untuk sampel, memeriksa, mengevaluasi dan plot suatu mean sampel, (4) waktu yang diperlukan untuk pencarian dan perbaikan penyebab dialihkan. Atas dasar (1971) model Duncan, sebuah ekonomi desain bagan kendali x dianggap ketika ada beberapa penyebab dialihkan. Diasumsikan bahwa proses dimulai dalam keadaan kendali statistik dengan mean 0 σ μ dan standar deviasi.")
9
dan x grafik adalah untuk mendeteksi penyebab banyak dialihkan dari awal. Rata-rata waktu untuk terjadinya penyebab assignable mth adalah sama dengan 1 / m λ (m = 1, 2, ...). Tidak ada batasan pada nilai m untuk proses dan juga bebas dari penyebab terjadinya dialihkan lain. Kemudian probabilitas bahwa tidak ada menyebabkan dialihkan telah terjadi pada akhir waktu adalah t mt e-Σλ. Oleh karena itu, waktu rata-rata selama yang proses ini di- kontrol dapat ditampilkan sebagai:
. Tidak ada batasan pada nilai m untuk proses dan juga bebas dari penyebab terjadinya dialihkan lain. Kemudian probabilitas bahwa tidak ada menyebabkan dialihkan telah terjadi pada akhir waktu adalah t mt e-Σλ. Oleh karena itu, waktu rata-rata selama yang proses ini di- kontrol dapat ditampilkan sebagai:.")
10
dimana Λ= λm rata-rata proses akan bergeser ke µ0+σm ketika mth tersebut menyebabkan dialihkan terjadi. Biarkan m P probabilitas bahwa suatu titik sampel jatuh di luar kontrol batas setelah terjadinya penyebab mth. Kemudian m P dapat ditampilkan sebagai:

11
dimana Φ (•) adalah fungsi kepadatan kumulatif (CDF) dari distribusi normal standar, n adalah ukuran sampel dan k adalah koefisien dari batas kendali. Kemudian jumlah rata-rata sampling yang akan diambil setelah penyebab assignable mth telah terjadi akan menjadi 1 / m P. Dan interval waktu antara menyebabkan terjadinya assignable dan deteksi dapat ditunjukkan sebagai persamaan berikut (Duncan, 1971):
:.")
12
dimana h adalah sampling interval
dimana h adalah sampling interval. Misalkan sampel yang diambil pada interval jam h, dan menyebabkan assignable mth terjadi di interval antara j dan (j +1) sampel th. Maka waktu rata-rata terjadinya mth menyebabkan dialihkan dalam interval antar sampel adalah:
 sampel th. Maka waktu rata-rata terjadinya mth menyebabkan dialihkan dalam interval antar sampel adalah:")
13
Misalkan waktu untuk pengujian dan analisis untuk setiap sampel g dan rata-rata waktu yang diperlukan untuk menemukan dan memperbaiki penyebab assignable mth adalah m D setelah itu benar-benar terjadi. Kemudian rata-rata lengkap siklus-panjang, oleh karena itu, akan:

14
Biarkan α adalah probabilitas tipe I error. Kemudian
Jumlah diharapkan dari alarm palsu per panjang rata-rata siklus lengkap sebelum dialihkan menyebabkan terjadi akan α kali diharapkan jumlah sampel yang diambil dalam periode- kontrol, dan dapat dinyatakan sebagai:

15
BIAYA KERUGIAN DIPERKIRAKAN DIHASILKAN
Biaya kerugian yang diperkirakan peta kendali dalam model ini selama siklus terdiri dari biaya penalti karena kualitas yang buruk terjadi ketika penyebab assignable terjadi, hilangnya-biaya benar-benar menemukan dan memperbaiki penyebab assignable setelah memperoleh sinyal out-of-control, rugi biaya per unit waktu mengidentifikasi alarm palsu per siklus dan biaya yang diharapkan untuk pengambilan sampel dan mempertahankan control chart. Hal ini dapat dinyatakan sebagai persamaan berikut:

16
ANALISIS SENSITIVITAS
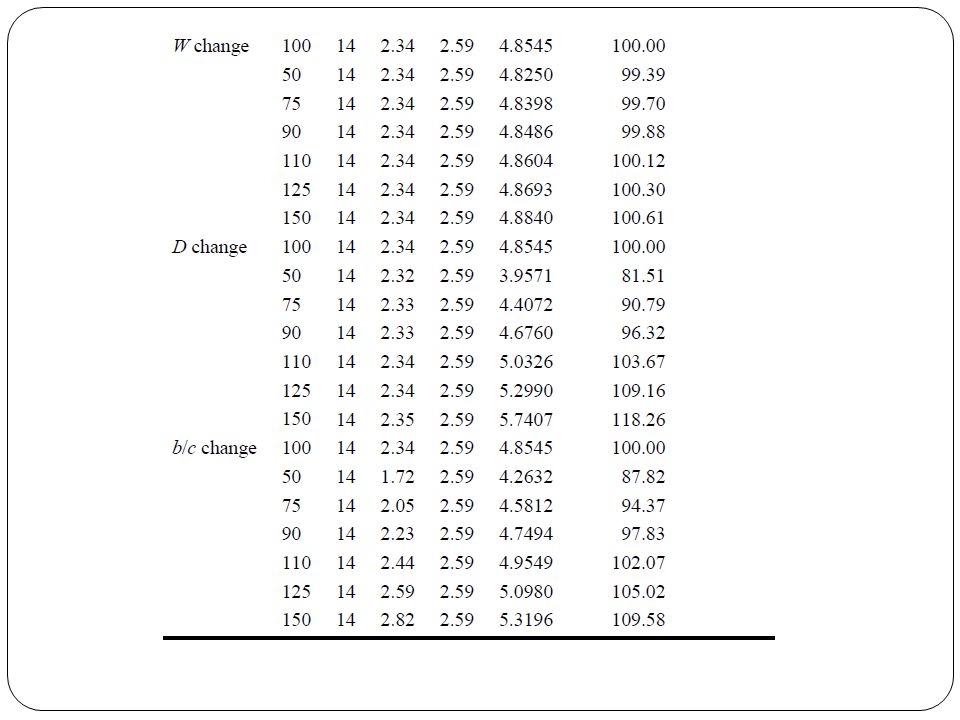
Bagian ini membahas ketahanan model ketika parameter waktu, biaya, pergeseran dan tingkat kegagalan bervariasi. Nilai-nilai parameter yang diberikan dalam contoh digunakan sebagai kasus dasar, sehingga unsur biaya unik atau masukan parameter seperti δ m, λ m, m M, m W, m D, b dan c diubah oleh ± 10%, ± 25% dan ± 50% dari nilai asli untuk menentukan tren di rugi biaya minimum sesuai dengan statistik yang sama kendala. Untuk setiap dari 6 × 7 kasus alternatif, nilai optimal n, h dan k ditentukan, dan ditampilkan pada Tabel 3.

19
Analisis ini juga memberikan indikasi sensitivitas biaya kerugian masing-masing parameter masukan. Ketika besaran semua pergeseran δ m bervariasi dari 0,5, 0,75, 0,9, 1,1, 1,25, untuk 1,5 kali nilai asli, estimasi biaya minimum akan $ 8,2062, 5,8083 $, $ 5,1965, ..., $ 4,2111 pada interval sampling yang berbeda (h) dan kontrol koefisien (k). Rasio antara biaya dan biaya minimum asli ($ 4,8545) adalah 169,04% ($ 8,2062 / $ 4,8545) menjadi 86,75% ($ 4,2111 / $ 4,8545). Semakin sedikit nilai δ m adalah, semakin besar ukuran sampling. Sampling interval akan menurun ketika meningkat δ m nilai. Lainnya pengamatan yang menarik yang berkaitan dengan grafik ekonomi-statistik adalah sebagai berikut:
 dan kontrol koefisien (k). Rasio antara biaya dan biaya minimum asli ($ 4,8545) adalah 169,04% ($ 8,2062 / $ 4,8545) menjadi 86,75% ($ 4,2111 / $ 4,8545). Semakin sedikit nilai δ m adalah, semakin besar ukuran sampling. Sampling interval akan menurun ketika meningkat δ m nilai. Lainnya pengamatan yang menarik yang berkaitan dengan grafik ekonomi-statistik adalah sebagai berikut:.")
20
1. Ketika laju menyebabkan terjadinya assignable (λ) meningkat, penurunan nilai h dan kenaikan rugi-biaya. Artinya, semakin tinggi tingkat di mana menyebabkan dialihkan terjadi, yang lebih pendek sampling interval. Perubahan kerugian-biaya dari 60,18% menjadi 136,02% dibandingkan dengan asli biaya. Namun nilai pada k masih tetap tidak berubah karena batas atas tipe I dan II probabilitas kesalahan. 2. Kerugian-biaya akan 60,20% sampai 136,61% dari aslinya jika hukuman biaya (M) karena miskin perubahan kualitas dan memiliki efek hampir sama dengan λ. Semakin kecil M, semakin besar h. 3. Biaya pencarian dan perbaikan (W) hanya memiliki efek yang dapat diabaikan pada h atau k, dimana rugi biaya perubahan dari 99,39% menjadi 100,61% dari aslinya. 4. Demikian juga dengan waktu mencari dan memperbaiki (D) hanya memiliki efek yang dapat diabaikan pada h atau k, dimana perubahan rugi biaya dari 81,51% menjadi 118,26%.
 meningkat, penurunan nilai h dan kenaikan rugi-biaya. Artinya, semakin tinggi tingkat di mana menyebabkan dialihkan terjadi, yang lebih pendek sampling interval. Perubahan kerugian-biaya dari 60,18% menjadi 136,02% dibandingkan dengan asli biaya. Namun nilai pada k masih tetap tidak berubah karena batas atas tipe I dan II probabilitas kesalahan. 2. Kerugian-biaya akan 60,20% sampai 136,61% dari aslinya jika hukuman biaya (M) karena miskin perubahan kualitas dan memiliki efek hampir sama dengan λ. Semakin kecil M, semakin besar h. 3. Biaya pencarian dan perbaikan (W) hanya memiliki efek yang dapat diabaikan pada h atau k, dimana rugi biaya perubahan dari 99,39% menjadi 100,61% dari aslinya. 4. Demikian juga dengan waktu mencari dan memperbaiki (D) hanya memiliki efek yang dapat diabaikan pada h atau k, dimana perubahan rugi biaya dari 81,51% menjadi 118,26%..")
21
5. Waktu yang diperlukan untuk sampel, menguji, mengevaluasi dan plot sampel (b / c) juga memiliki pengaruh yang kecil terhadap h. Semakin tinggi biaya b dan c, semakin lama interval sampling, dimana perubahan rugi biaya dari 87,82% menjadi 109,58%. 6. Hal ini diperlukan untuk lebih memperhatikan parameter besarnya pergeseran (δ), tingkat menyebabkan terjadinya assignable (λ) dan biaya penalti (M) ketika proses out-of-control.
 juga memiliki pengaruh yang kecil terhadap h. Semakin tinggi biaya b dan c, semakin lama interval sampling, dimana perubahan rugi biaya dari 87,82% menjadi 109,58%. 6. Hal ini diperlukan untuk lebih memperhatikan parameter besarnya pergeseran (δ), tingkat menyebabkan terjadinya assignable (λ) dan biaya penalti (M) ketika proses out-of-control. .")
22
KESIMPULAN Dalam prakteknya, menyebabkan beberapa assignable lebih realistis daripada yang tunggal. Untuk ekonomi desain diagram kontrol, penyebab tunggal dialihkan lebih populer maka beberapa orang. Juga desain ekonomi dosis peta kendali tidak mempertimbangkan sifat statistik, seperti probabilitas tipe I dan tipe II kesalahan ketika memilih parameter desain. Dalam rangka memberikan perlindungan lebih baik konsumen dan produsen, Sebuah model ekonomi-statistik dari bagan kendali x dengan beberapa penyebab telah dibangun dialihkan untuk menentukan parameter desain yang optimal dalam makalah ini. Untuk membandingkan dan memverifikasi efektivitas model ekonomi yang diusulkan dan murni, sebuah numerik contoh juga diberikan dan itu menunjukkan bahwa kinerja statistik dari peta kendali dapat ditingkatkan secara signifikan dan mencapai yang diinginkan persyaratan statistik dengan menggunakan statistik ekonomi- desain dengan peningkatan diterima di biaya.

Presentasi serupa


 JURUSAN TEKNIK INDUSTRI FAKULTAS TEKNIK UNIVERSITAS SULTAN AGENG TIRTAYASA CILEGON-BANTEN 2010 A MULTIVARIATE.>")









 Kelas B.>")







